一种基于时间窗的多AGV交通管制方法
- 国知局
- 2024-09-11 14:20:42
本发明涉及agv交通管制,具体涉及一种基于时间窗的多agv交通管制方法。
背景技术:
1、随着人工智能领域的快速发展,工业4.0相关政策的推动加速人工智能领域的变革。将传统制造业与人工智能相结合的战略推动国家和企业的发展。agv是智能制造系统中不可或缺的部分,也是智慧物流的重要组成部分。进入二十一世纪后,智能移动机器人得到迅速的发展,在日常生活和生产制造中扮演者重要的角色。agv已经应用在物流分拣、智能仓储、安全制造等众多领域,智能革命逐渐将传统的人工车间变为智慧车间,企业对于生产效率的要求越来越高,由原来的单一agv逐渐地增加为多agv来满足复杂生产环境需求。在智能制造场景下,多agv的交通管制对于运输效率的影响很大。
2、为了避免车辆在相同路径上发生碰撞,会对整个系统内的agv执行交通管制,从而确保需要在同一路径上执行任务的agv不会发生碰撞,但随着agv被更加广泛地应用,生产场地内的路径设置数量增多,两相邻的路径之间设置的间距过小,导致出现了在某区域内多个相邻的路径的多辆agv发生碰撞事故的情况,而现有的交通管制方法无法应对上述情况。
技术实现思路
1、鉴于以上所述现有技术的缺点,本发明提供基于时间窗的多agv的交通管制方法。解决多agv路径出现的冲突和死锁问题,保证agv的稳定运行。
2、为实现上述效果,本发明的技术方案如下:
3、一种基于时间窗的多agv交通管制方法,包括以下步骤:
4、步骤一:对于区域内有多个相邻的路径的运输系统;调度系统加载路径地图和车辆的车辆信息,车辆信息包括车辆编号和车辆尺寸;生成车辆在所有路径上移动的车辆轮廓曲线;
5、步骤二:数字化agv工作环境信息,得到agv工作环境电子地图;在agv工作环境电子地图上,为agv规划出时间最短的路径;agv接收调度系统下发的任务信息,所述任务包含任务起点、任务终点和执行任务的agv;
6、调度系统根据路径地图查询agv执行任务需要使用到的路径,得出对应任务路径列表;
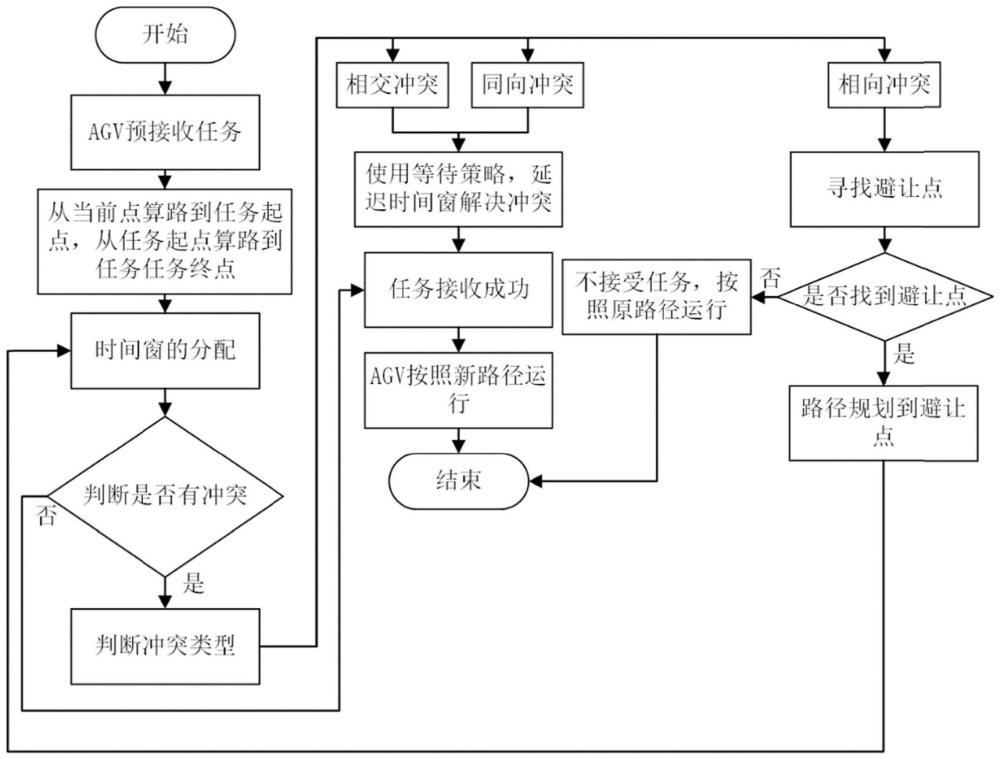
7、步骤三:调度系统通过预设的多agv路径规划算法得到从当前点到任务起点的路径、从任务起点到任务终点的路径,agv当前点到任务起点的路径作为主路径,任务起点到任务终点的路径作为反向预约路径;
8、步骤四:调度系统对agv进行时间窗的分配;利用时间窗提前检测出agv之间的冲突;
9、步骤五:调度系统根据任务路径列表判断agv间路径是否存在冲突,采用等待或更换路径的方式来避免冲突;
10、若不存在冲突,则按照当前的路径时间窗运行执行任务;若存在冲突,则判断冲突类型;所述冲突类型分为:相向冲突、同向冲突和相交冲突;
11、若冲突类型是相交冲突或同向冲突,则用等待的方式使时间窗重新排列以解决冲突,从而成功接收任务信息,每次到站后将对时间窗进行更新;
12、若冲突类型是相向冲突,则根据广度搜索算法寻找一个避让点使agv暂时算路到此站点进行避让,若没有找到避让点,则取消此任务,agv按照原来的路径返回停车点。
13、进一步的,步骤1调度系统根据车辆尺寸和路径地图,生成车辆在路径上按照设定移动速度移动的车辆轮廓曲线。
14、进一步的,步骤1采用拓扑法构建双向单路径的agv环境电子地图:
15、根据agv需要停靠的停靠点设置相应的节点,使用坐标(id,x,y)表示,id表示节点的编号,(x,y)表示agv从原点出发到达节点横坐标、纵坐标所需时间;设置agv在作业点之间来回的中间节点;节点设置好后将相邻节点用边连接组成网状结构图。
16、进一步的,所述agv行驶的路径均为双向多agv行驶通道。
17、进一步的,所述agv行驶的地面上设有区别于地面颜色的轨迹标记,所述agv在行驶过程中获取地面图像,并通过视觉处理识别地面上的轨迹标记。
18、进一步的,步骤四对agv进行时间窗的分配,包括:
19、agv在进行路径规划后,对已规划的路线计算时间信息,路径的时间窗为[tstart,tend],即agv占用该路径是从tstart时刻开始到tend时刻结束,若在tstart时刻agv所在的点是路线的起始点,则tstart是零时刻;若在tstart时刻agv所在的点不是路线的起始点,则tstart是前一路径段的tend,计算的方法如下:
20、
21、其中,l表示相邻节点间的路径的长度,v表示agv的速度;
22、agv的集合为r={r1,r2,...,rn},ri代表第i辆agv,agv的路径集合为p={l1,l2,...,ln},路径中站点的集合为vex={v1,v2,...,vn},第i个agv的路径为pi={l1,l2,...,ln},其中第k段的路径信息为na和nb为第k段的路径的两个端点。
23、进一步的,步骤五所述广度搜索算法步骤如下:
24、(1)初始化集合s、集合u;
25、(2)将当前节点放入集合s中,作为已经搜索过的点;
26、(3)向当前点的相邻节点依次进行搜寻,若相邻节点是在冲突agv当前站点所在的关联路径范围内,则将相邻节点视为阻碍点,并将相邻节点加入到u集合中,不再探索通过agv才能到达的节点;
27、若相邻节点不在冲突agv当前站点所在的关联路径范围内,则把相邻节点加入到集合s中;
28、(4)若相邻节点已不在冲突agv剩余路径所在的关联路径范围内,则找到可以进行躲避的站点,广度搜索算法搜寻结束;
29、(5)若相邻节点还在冲突agv剩余路径所在的关联路径范围内,则继续探索当前节点的下一个相邻节点,若相邻节点探索完,从这些相邻节点中选择一个相邻节点作为下一个节点,以此循环直至找到避让点。
30、与现有技术相比,本发明技术方案的有益效果是:
31、本发明针对agv交通管制中出现的冲突和死锁问题,以时间窗算法为基础提出解决冲突和死锁的策略,受到agv体积对路径的影响,引入关联路径保证agv之间的安全。针对死胡同路径,提出反向预约路径的方法;对于冲突类型进行分类以及预测,并重新排布冲突的时间窗;对于死锁冲突通过广度搜索算法寻找避让点解决死锁。
技术特征:1.一种基于时间窗的多agv交通管制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,步骤1调度系统根据车辆尺寸和路径地图,生成车辆在路径上按照设定移动速度移动的车辆轮廓曲线。
3.根据权利要求1所述的方法,其特征在于,步骤1采用拓扑法构建双向单路径的agv环境电子地图:
4.根据权利要求1所述的方法,其特征在于,所述agv行驶的路径均为双向多agv行驶通道。
5.根据权利要求1所述的方法,其特征在于,所述agv行驶的地面上设有区别于地面颜色的轨迹标记,所述agv在行驶过程中获取地面图像,并通过视觉处理识别地面上的轨迹标记。
6.根据权利要求1所述的方法,其特征在于,步骤四对agv进行时间窗的分配,包括:
7.根据权利要求1所述的方法,其特征在于,步骤五所述广度搜索算法步骤如下:
技术总结本发明公开一种基于时间窗的多AGV交通管制方法,包括:对于区域内有多个相邻的路径的运输系统;调度系统加载路径地图和车辆的车辆信息,车辆信息包括车辆编号和车辆尺寸;生成车辆在所有路径上移动的车辆轮廓曲线;数字化AGV工作环境信息,得到AGV工作环境电子地图;在AGV工作环境电子地图上,为AGV规划出时间最短的路径;本发明针对AGV交通管制中出现的冲突和死锁问题,以时间窗算法为基础提出解决冲突和死锁的策略,针对死胡同路径,提出反向预约路径的方法;对于冲突类型进行分类以及预测,并重新排布冲突的时间窗;对于死锁冲突通过广度搜索算法寻找避让点解决死锁。技术研发人员:宋莹,张勇盛,杨锦泽,陈逸菲受保护的技术使用者:无锡学院技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/290274.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表