一种移动式路侧行人交通冲突监测与预警装置及方法
- 国知局
- 2024-09-11 14:16:01
本发明涉及道路交通安全,尤其涉及一种移动式路侧行人交通冲突监测与预警装置及方法。
背景技术:
1、
2、提供一种可以在道路转角遮挡路段及道路改扩建道路围栏区等视野盲区处,实现白天黑夜实时盲区行人冲突监测及预警的移动式路侧行人交通冲突监测与预警装置,用于改善路口视野盲区提供可观测的标识,降低事故的发生的可能,是非常必要的。
技术实现思路
1、有鉴于此,本发明提出了一种可有效监测视野盲区中的行人或非机动车驾驶员,并及时提醒驾驶员潜在交通冲突风险的移动式路侧行人交通冲突监测与预警装置及方法。
2、本发明的技术方案是这样实现的:
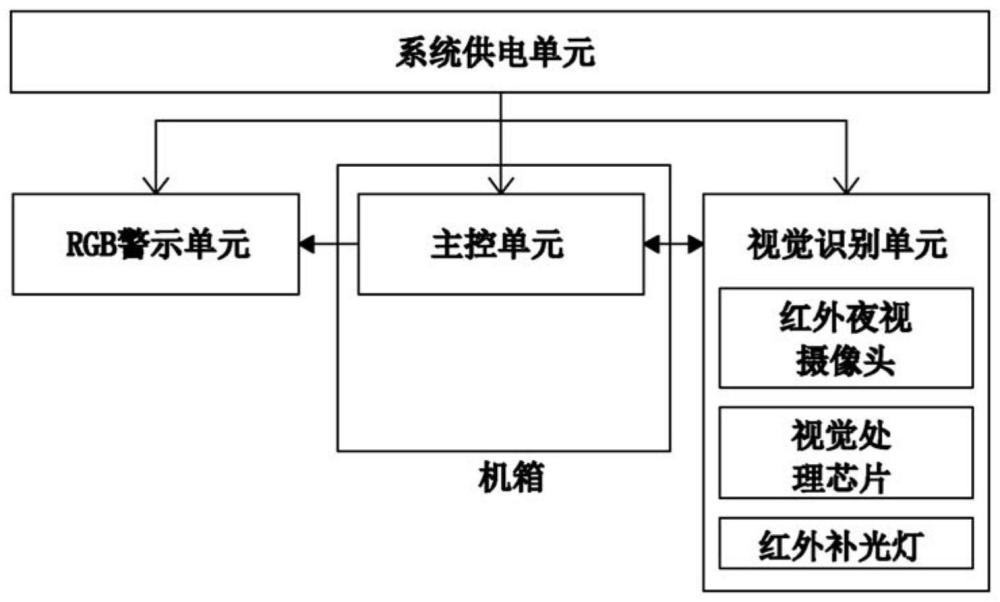
3、一方面,本发明提供了一种移动式路侧行人交通冲突监测与预警装置,包括:
4、机箱,设置在存在视野盲区的转角位置;
5、视觉识别单元,设置在机箱下方,正对视野盲区方向,用于获取视野盲区的图像,识别并获取图像中的目标的运动轨迹信息;
6、主控单元,设置在机箱内,与视觉识别模块通信连接,用于接收视觉识别模块获得的图像中的目标的运动轨迹信息,判断目标进入预设的冲突区域时,生成警示指令;
7、rgb警示单元,设置在机箱的一侧,一端与机箱铰接,另一端朝着正对机动车行进侧道路的上方水平伸出,rgb警示单元与主控单元通信连接,用于接收警示指令并向车辆驾驶人员展示;
8、系统供电单元,设置在机箱上方,分别与视觉识别模块、主控单元和rgb警示单元电性连接,用于提供工作电源。
9、在以上方案的基础上,优选的,所述视觉识别单元包括红外夜视摄像头和视觉处理芯片,红外夜视摄像头与视觉处理芯片通信连接;红外夜视摄像头获取视野盲区的图像,并将图像发送给视觉处理芯片;视觉处理芯片识别图像中的目标位置,并结合不同时刻的图像,标注目标的运动轨迹,通过视角转换,获取目标的真实世界坐标,判断目标是否进入预设的冲突区域,如是则将包含目标的位置、距离和速度的运动轨迹信息发送给主控单元;如否则视觉识别单元不会与主控单元通信,由视觉处理芯片重新分析获取到的视野盲区的图像。
10、优选的,主控单元判断目标是否进入预设的冲突区域的判定条件包括通过意愿度i和目标距离d,当通过意愿度i和目标距离d两者同时满足设定要求时,认为目标即将进入预设的冲突区域;否则,视觉处理芯片重新分析视野盲区的图像;其中,目标为行人与非机动车驾驶员。
11、进一步优选的,通过意愿度i通过下式计算:
12、其中l为道路转角的一般轨迹线;t表示当前时刻,在当前时刻t向已采集的视野盲区的图像中抽取十帧,且每一秒抽取两个不同的帧,使用(xt-i,yt-i)来表示目标在不同帧对应的现实世界坐标,i=0,1,2,...,9,(xt-i,yt-i)∈{(xt,yt),(xt-1,yt-1),...,(xt-9,yt-9)};表述一般轨迹线l与目标在不同帧对应的现实世界坐标构成的目标的运动轨迹之间的间距;表示不同帧对应的现实世界坐标构成的目标的运动轨迹与一般轨迹线l的偏差程度;分母为权重项,j=0,1,2,...,9,距离当前时刻t越近,权重项取值越大;vi代表目标在相邻两帧之间的速度,初速度为0.5-1m/s,取值越大表示通过盲区的可能性越大;cos<l,(xt-i-xt-i-1,yt-i-yt-i-1)>表示抽取的十帧中任意两个相邻帧对应的现实世界坐标构成的目标的运动轨迹与一般轨迹线l之间的余弦相似度,余弦相似度用于衡量目标在不同帧对应的现实世界坐标构成的目标的运动轨迹与一般轨迹线l之间的角度差异。
13、进一步优选的,所述通过意愿度i和目标距离d两者同时满足设定要求,具体内容为:1)当视觉处理芯片判定目标距离d<15m时,视觉处理芯片即开始搜集数据,视觉处理芯片向主控单元发送目标的运动轨迹信息,主控单元计算通过意愿度i,但是主控单元不会生成警示指令;2)当视觉处理芯片判定目标距离5m<d<10m时,则视觉处理芯片向主控单元发送目标的运动轨迹信息,主控单元计算通过意愿度i不小于设定阈值α时,主控单元生成警示指令并发送给rgb警示单元,并每间隔一定时间更新目标与预设的冲突区域之间的距离;主控单元计算通过意愿度i小于设定阈值α时,则主控单元不生成警示指令;3)当视觉处理芯片判定目标距离d<5m时,视觉处理芯片向主控单元发送目标的运动轨迹信息,主控单元计算通过意愿度i>0时,主控单元生成警示指令并发送给rgb警示单元。
14、更进一步优选的,rgb警示单元包括矩形的灯板;rgb警示单元在接收到主控单元的警示指令后,在灯板区域生成行人的图案,灯板区域的水平长度与目标距离d成正比,且行人的图案距离灯板区域的边缘的距离与目标距离d的实时值相对应;rgb警示单元根据主控单元每隔一定时间更新的目标与预设的冲突区域之间的距离,改变行人的图案在灯板上的相对位置。
15、再进一步优选的,所述矩形的灯板上阵列设置有主体发光部,主体发光部采用黄色led灯。
16、优选的,所述目标距离d是由红外夜视摄像头获取940nm的红外波段图像后,视觉处理芯片解算得出,将目标距离d写入目标的运动轨迹信息中;视觉处理芯片中集成了基于轻量化改造的yolov5s算法,将采集的红外波段图像进行人工标注后组成数据集,将数据集划分为训练集和验证集,将训练集输入轻量化改造的yolov5s算法,通过训练得到对红外波段图像中识别目标及目标距离d测算的模型;所述基于轻量化改造的yolov5s算法,是通过引入ghostnet模块对原yolov5算法的backbone部分的conv模块进行改进,再引入fasternet模块替换原yolov5算法的backbone部分的结构形成的。
17、在以上技术方案的基础上,优选的,所述系统供电单元包括可充电电池、光伏发电组件、交流充电接口和低压直流充电接口,光伏发电组件、交流充电接口和低压直流充电接口均与可充电电池电性连接;可充电电池分别与视觉识别模块、主控单元和rgb警示单元电性连接。
18、另一方面,本技术还提供了一种移动式路侧行人交通冲突监测与预警方法,包括如下步骤:
19、s1:配置上述的移动式路侧行人交通冲突监测与预警装置;
20、s2:视觉识别模块采用基于轻量化改造的yolov5s算法训练,得到识别目标及目标距离d测算的模型;
21、s3:视觉识别模块在获取视野盲区的图像后,输入识别目标及目标距离d测算的模型中,将图像中的行人或者非机动车驾驶员作为目标,获取目标的运动轨迹信息并发送给主控单元;
22、s4:主控单元接收到目标的运动轨迹信息后,并判断目标是否进入预设的冲突区域;如是,则主控单元生成警示指令并发送给rgb警示单元进行输出展示;如不是,则视觉识别模块重新分析视野盲区的图像;
23、s5:rgb警示单元接收到警示指令后,按照目标与预设的冲突区域的距离,生成行人的图案,并通过发光显示的方式展示给车辆驾驶人员,提示驾驶人员盲区内有目标接近,应及时减速规避;
24、s6:当目标离开视觉识别模块监控区域或者经过设的冲突区域后,rgb警示单元的显示内容复位,重复执行步骤s3-s5。
25、本发明提供的一种移动式路侧行人交通冲突监测与预警装置及方法,相对于现有技术,具有以下有益效果:
26、1)本技术针对车辆驾驶员无法检测的视野盲区问题,移动式路侧行人交通冲突监测与预警装置获取盲区的图像,识别图像中的行人或者非机动车驾驶员作为目标,通过分析得到目标的运动轨迹信息,在目标接近预设的冲突区域时,主控单元生成警示指令,并启用rgb警示单元实现具有警告色的灯光提示,梯形司机识别盲区风险,降低交通事故风险;
27、2)本技术利用红外夜视摄像头结合视觉处理芯片,实现视觉识别,通过ghostnet以及fasternet模块对yolov5的backbone部分的优化显著提高了图像的处理速度,使产品在计算机视觉处理速度进行了提升,由8.5fps提升到了15fps,提高了检测与预警装置的实时性和有效性;
28、3)本技术提出了一种通过意愿度的计算方法,充分结合了不同帧对应的现实世界坐标构成的目标的运动轨迹与一般轨迹线的偏差程度、目标在相邻两帧之间的速度、目标的运动轨迹与一般轨迹线之间的余弦相似度和权重项,充分考虑了目标的位置、移动速度和移动方向,能够有效的衡量目标的通过倾向,很好的判断目标是否通过进行预测目标是否通过盲区附近的预设的冲突区域;如果目标有强通过意愿,主控单元生成警示指令并触发rgb警示单元;如果目标并非以通过预设的冲突区域为目的进入摄像画面时不会使主控单元生成警示指令;
29、4)移动式路侧行人交通冲突监测与预警装置具有便捷性和普适性,本装置可拆卸的设置在道路防护板上即可工作;考虑到大部分道路改扩建场景下供电不便的情况,为满足全天候使用的需求,本产品设计了多种供电方式,由type-c插口、太阳能板或者220v交流电,向可充电电池供电,再通过可充电电池向整个系统供电。
本文地址:https://www.jishuxx.com/zhuanli/20240911/289890.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表