清扫车多源传感信息融合与校验方法、装置及计算设备与流程
- 国知局
- 2024-09-11 14:23:10
本发明涉及智能交通与传感器信息融合,具体涉及一种清扫车多源传感信息融合与校验方法、装置及计算设备。
背景技术:
1、随着清扫车技术的深入发展,其智能化水平越来越高。为实现清扫车的精准导航、避障以及路径规划,需要准确获取并融合来自多个传感器的信息。然而,由于清扫车工作环境复杂多变,传感器数据往往具有不同的特性,如线性与非线性、高斯与非高斯分布等,如何有效融合传感器数据成为关键问题。然而,在对传感器信息融合之前,如何对传感器信息进行评估直接影响或决定信息融合的效果。
2、评估传感器信息可以识别并排除可靠性低的数据,确保融合过程基于高质量数据。以及,确保在面对不同环境、不同条件下都能够保持稳定的性能,在复杂多变的环境中保持高效、准确的感知和响应能力。因此,融合之前对传感器信息进行评估是确保信息融合过程准确进行的关键环节,对于提高清扫车的安全性和可靠性具有重要意义。
3、现有的传感器信息评估方法包括阈值检查法、统计分析法、冗余传感器比较法以及神经网络模型等。其中,阈值检查法依赖于经验或实验,不同的环境或工作条件需要不同的阈值,无法适应动态变化的环境。统计分析法对传感器数据进行如计算均值、标准差、偏度、峰度等统计量等统计分析,不能捕获多者复杂多变的数据分布变化。冗余传感器比较法使用多个相同或不同类型的传感器来测量同一物理量,如果结果差异过大,表示其中一个传感器存在问题,需要额外的硬件成本。神经网络模型需要大量的标记数据训练学习模型,鲁棒性和泛化性较差。
4、本技术发明人在解决如何对多源传感信息进行融合与校验问题的研发过程中,发现对多源传感信息进行融合与校验方法相对成熟、难以改进,然而,如何评估当前传感器信息的不确定性将动态决定融合权重(权重分配)。于是,发明人另辟蹊径,将对多源传感信息进行融合与校验的研究,转换为对传感器信息进行评估的研究。
技术实现思路
1、鉴于上述问题,提出了本发明以便提供一种提高多源传感信息融合与校验可靠性问题的清扫车多源传感信息融合与校验方法、装置及计算设备。盖装置可适用多种动力类型的清扫车,尤其适合混合动力的清扫车,具体技术方案如下:
2、根据本发明的一个方面,提供了一种清扫车多源传感信息融合与校验方法,包括:
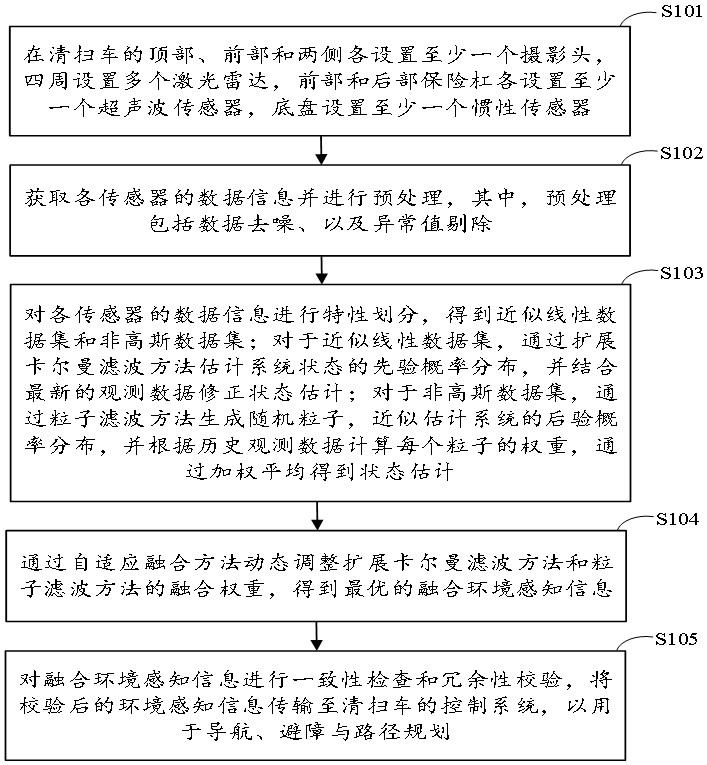
3、在所述清扫车的顶部、前部和两侧各设置至少一个摄影头,四周设置多个激光雷达,前部和后部保险杠各设置至少一个超声波传感器,底盘设置至少一个惯性传感器;
4、获取各传感器的数据信息并进行预处理,其中,所述预处理包括数据去噪、以及异常值剔除;
5、对所述各传感器的数据信息进行特性划分,得到近似线性数据集和非高斯数据集;对于近似线性数据集,通过扩展卡尔曼滤波方法估计系统状态的先验概率分布,并结合最新的观测数据修正状态估计;对于非高斯数据集,通过粒子滤波方法生成随机粒子,近似估计系统的后验概率分布,并根据历史观测数据计算每个粒子的权重,通过加权平均得到状态估计;
6、通过自适应融合方法动态调整扩展卡尔曼滤波方法和粒子滤波方法的融合权重,得到最优的融合环境感知信息;
7、对所述融合环境感知信息进行一致性检查和冗余性校验,将校验后的所述环境感知信息传输至所述清扫车的控制系统,以用于导航、避障与路径规划。
8、在一种可选的方式中,所述数据去噪的方法进一步包括:
9、根据多个传感器数据信息的原始数据序列预设滤波窗口为大小以及p阶多项式阶数;
10、对于原始数据序列中的每个数据点(),选取以为中心,包含n个数据点的局部数据窗口;在该局部数据窗口上使用最小二乘法拟合p阶多项式,得到拟合多项式系数;
11、使用该拟合多项式在处求值,得到滤波后的数据点(),将按顺序组合成新的滤波后数据序列;将该滤波后数据序列作为去除高频噪声后的传感器数据信息。
12、在一种可选的方式中,所述异常值剔除的方法进一步包括:
13、根据多个传感器数据点的原始数据序列,计算原始数据序列中所有数据点的平均值(μ)和标准差(σ);
14、对于原始数据序列中的每个数据点(),如果 | -μ| ≤ 3σ,则该数据点为正常值,保留在数据序列中;如果 | - μ| > 3σ,则该数据点为异常值,从数据序列中剔除;
15、将处理后的数据序列作为剔除异常值后的传感器数据信息。
16、在一种可选的方式中,所述对所述各传感器的数据信息进行特性划分,得到近似线性数据集和非高斯数据集进一步包括:
17、通过anderson-darling检验方法计算所述各传感器的数据信息的p值,将所述p值大于或等于预设显著性水平的数据信息划分为非高斯数据集;
18、对于p值小于预设显著性水平的数据信息,通过线性回归模型进行拟合得到r方值,将r方值大于或等于预设方值的数据信息划分为近似线性数据集合。
19、在一种可选的方式中,所述通过扩展卡尔曼滤波方法估计系统状态的先验概率分布,并结合最新的观测数据修正状态估计进一步包括:
20、步骤s1,设置初始状态估计值 () 和初始协方差矩阵 ();
21、步骤s2,根据非线性状态转移函数 () 预测当前时刻的状态估计();
22、步骤s3,计算状态转移函数()的雅可比矩阵 () ,根据雅可比矩阵()和过程噪声协方差矩阵 () 预测协方差();
23、步骤s4,根据观测函数()的雅可比矩阵 () 和观测噪声协方差矩阵 () 计算卡尔曼增益();
24、步骤s5,根据观测值 () 和卡尔曼增益 () 更新状态估计();
25、步骤s6,根据卡尔曼增益()、雅可比矩阵 ()以及协方差()更新协方差矩阵();
26、步骤s7,将当前时刻的状态估计 () 和协方差矩阵 ()作为下一时刻的初始值,重复步骤s2和步骤s3。
27、在一种可选的方式中,在步骤s2中,当前时刻的状态估计()的计算公式为:
28、
29、其中,是上一时刻的状态估计,是当前时刻的控制输入;
30、在步骤s3中,协方差()的计算公式为:
31、
32、其中,为根据扩展卡尔曼滤波上下文中前一个时间步更新后得到的上一时刻状态估计的协方差矩阵;
33、在步骤s4中,卡尔曼增益()的计算公式为:
34、
35、在步骤s5中,状态估计()的计算公式为:
36、
37、在步骤s6中,协方差矩阵()的计算公式为:
38、
39、其中,i为单位矩阵。
40、在一种可选的方式中,所述通过粒子滤波方法生成随机粒子,近似估计系统的后验概率分布进一步包括:
41、步骤s21,在时间步 (t=0) 时,从先验分布 () 中抽取 n个粒子 (),为每个粒子分配相等的权重;
42、步骤s22,从重要性分布中为每个粒子抽取一个样本();
43、步骤s23,根据观测似然和状态转移概率计算每个粒子的权重();
44、步骤s24,根据粒子及其权重估计系统的后验概率分布。
45、在一种可选的方式中,在步骤s23中,所述每个粒子的权重为:
46、
47、其中,为观测似然,表示给定状态时观测到的概率,为状态转移概率,是从状态转移到的状态转移概率,n为粒子数量;
48、在步骤s24中,所述后验概率分布的计算公式为:
49、
50、其中,为狄拉克函数,表示粒子在状态空间中的位置,表示第i个粒子在时间步t的状态,为第i个粒子在时间步t的归一化的权重, 表示在给定历史数据的条件下,当前状态的概率分布,为传感器观测到的数据序列。
51、根据本发明的另一方面,提供了一种清扫车多源传感信息融合与校验装置,包括:
52、设置模块,用于在所述清扫车的顶部、前部和两侧各设置至少一个摄影头,四周设置多个激光雷达,前部和后部保险杠各设置至少一个超声波传感器,底盘设置至少一个惯性传感器;
53、预处理模块,用于获取各传感器的数据信息并进行预处理,其中,所述预处理包括数据去噪、以及异常值剔除;
54、状态估计模块,用于对所述各传感器的数据信息进行特性划分,得到近似线性数据集和非高斯数据集;对于近似线性数据集,通过扩展卡尔曼滤波方法估计系统状态的先验概率分布,并结合最新的观测数据修正状态估计;对于非高斯数据集,通过粒子滤波方法生成随机粒子,近似估计系统的后验概率分布,并根据历史观测数据计算每个粒子的权重,通过加权平均得到状态估计;
55、融合模块,用于通过自适应融合方法动态调整扩展卡尔曼滤波方法和粒子滤波方法的融合权重,得到最优的融合环境感知信息;
56、校验模块,用于对所述融合环境感知信息进行一致性检查和冗余性校验,将校验后的所述环境感知信息传输至所述清扫车的控制系统,以用于导航、避障与路径规划。
57、根据本发明的又一方面,提供了一种计算设备,包括:处理器、存储器、通信接口和通信总线,所述处理器、所述存储器和所述通信接口通过所述通信总线完成相互间的通信;
58、所述存储器用于存放至少一可执行指令,所述可执行指令使所述处理器执行上述清扫车多源传感信息融合与校验方法对应的操作。
59、根据本发明提供的方案,在所述清扫车的顶部、前部和两侧各设置至少一个摄影头,四周设置多个激光雷达,前部和后部保险杠各设置至少一个超声波传感器,底盘设置至少一个惯性传感器;获取各传感器的数据信息并进行预处理,其中,所述预处理包括数据去噪、以及异常值剔除;对所述各传感器的数据信息进行特性划分,得到近似线性数据集和非高斯数据集;对于近似线性数据集,通过扩展卡尔曼滤波方法估计系统状态的先验概率分布,并结合最新的观测数据修正状态估计;对于非高斯数据集,通过粒子滤波方法生成随机粒子,近似估计系统的后验概率分布,并根据历史观测数据计算每个粒子的权重,通过加权平均得到状态估计;通过自适应融合方法动态调整扩展卡尔曼滤波方法和粒子滤波方法的融合权重,得到最优的融合环境感知信息;对所述融合环境感知信息进行一致性检查和冗余性校验,将校验后的所述环境感知信息传输至所述清扫车的控制系统,以用于导航、避障与路径规划。本发明将对多源传感信息进行融合与校验的研究,转换为对传感器信息进行评估的研究,通过对不同特性的数据集采用扩展卡尔曼滤波或粒子滤波方法进行估计,提高了信息融合与校验的可靠性。具体地,通过在清扫车顶部、前部、两侧以及底盘等多个关键部位设置摄影头、激光雷达、超声波传感器和惯性传感器等,实现对周围环境的全方位感知,不仅保证信息的全面性,而且通过不同传感器之间的互补性,提高了信息的准确性。数据去噪采用局部数据窗口内的最小二乘法拟合p阶多项式方法,能够去除高频噪声,保留有用信息。异常值剔除通过计算数据点的平均值和标准差,将超过一定阈值的数据点视为异常值并剔除,进一步减少了噪声和干扰对信息融合的影响。扩展卡尔曼滤波通过预测和更新步骤,精确估计系统的状态,粒子滤波通过生成随机粒子并计算其权重近似估计系统的后验概率分布。通过对不同特性的数据集采用扩展卡尔曼滤波或粒子滤波方法进行估计,进一步提高了信息融合与校验的可靠性。通过自适应融合方法动态调整扩展卡尔曼滤波和粒子滤波的融合权重,清扫车能够智能选择最适合当前环境条件的融合策略,确保环境感知信息的准确性和实时性,无论是在线性还是非线性、高斯还是非高斯环境下都能达到最佳性能。此外,对融合环境感知信息进行一致性检查和冗余性校验,进一步增强了信息的可靠性和鲁棒性,降低了误判和误操作的风险。进而清扫车在导航、避障与路径规划时更加高效和安全。
60、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
本文地址:https://www.jishuxx.com/zhuanli/20240911/290515.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。