一种基于容错抗干扰控制的汽车电子节气门控制方法与流程
- 国知局
- 2024-09-11 14:27:35
本发明涉及汽车电子节气门控制,具体为一种基于容错抗干扰控制的汽车电子节气门控制方法。
背景技术:
1、汽车电子节气门控制是现代汽车发动机管理系统中的一个关键技术,它直接影响发动机的空气进气量,进而控制发动机的功率输出和燃烧效率。随着汽车行业对燃油效率和排放标准的要求日益严格,精确控制节气门的开度成为提高汽车性能的重要手段。然而,电子节气门系统在实际运行中会受到多种外部干扰的影响,如传感器的误差、环境温度变化和发动机振动等,这些干扰可能导致节气门的实际位置与目标位置之间存在偏差,影响发动机的性能和稳定性。
2、另外,汽车电子节气门执行器负责实现驾驶员油门踏板的指令和发动机控制单元的指示,调节进入发动机的空气流量。然而,执行器可能由于电机故障、齿轮磨损、电子控制单元故障或环境因素,如温度极端、腐蚀或灰尘积累等,而发生故障。这些故障可能导致执行器响应延迟、定位不准确或完全失效,从而影响节气门的开闭,进一步导致发动机性能下降、油耗增加或排放超标。
3、在这种背景下,提出了一种基于容错抗干扰控制的汽车电子节气门控制方法。该方法利用非奇异终端滑模控制技术的强大抗干扰,以及通过设计容错方法及抗干扰方法,确保在传感器故障或其他非预期事件发生时,汽车电子节气门控制系统能迅速采取措施,保持发动机性能和稳定性,从而提高整个汽车的驾驶性能和安全性。
技术实现思路
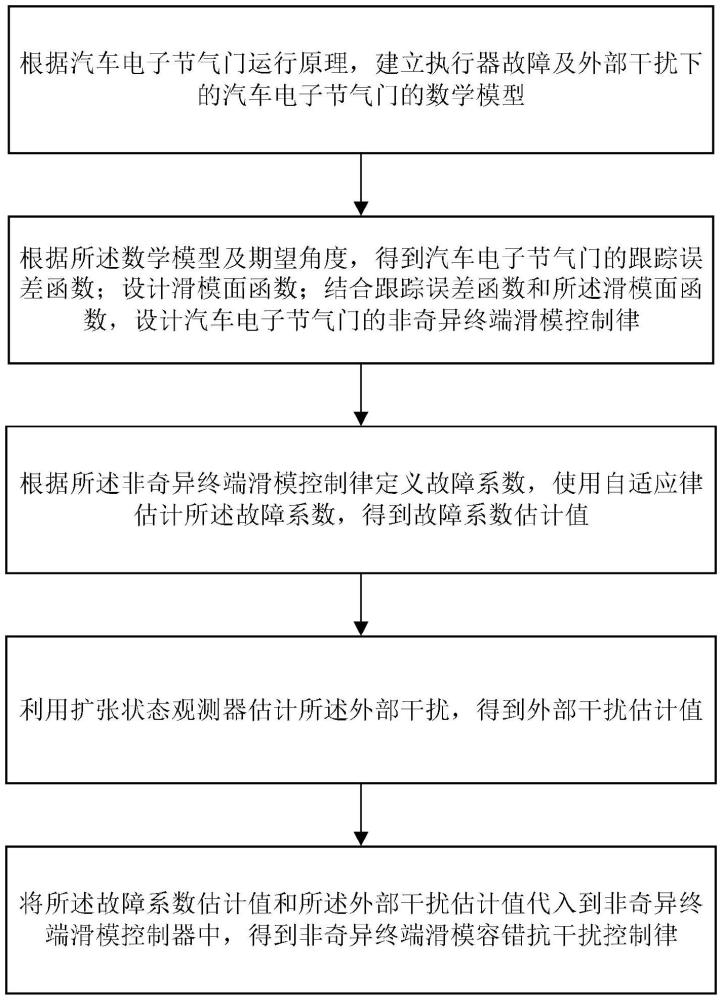
1、本发明提供一种基于容错抗干扰控制的汽车电子门控制方法,用于解决上述技术问题。首先,根据汽车电子节气门运行原理,建立执行器故障及外部干扰下的汽车电子节气门的数学模型;其次,根据所述数学模型及期望角度,得到汽车电子节气门的跟踪误差函数,设计滑模面函数;结合所述跟踪误差函数和所述滑模面函数,设计汽车电子节气门的非奇异终端滑模控制律;根据所述非奇异终端滑模控制律定义故障系数,使用自适应律估计所述故障系数,得到故障系数估计值;利用扩张状态观测器估计所述外部干扰,得到外部干扰估计值;最后,将所述故障系数估计值和所述外部干扰估计值代入到非奇异终端滑模控制器中,得到非奇异终端滑模容错抗干扰控制律。
2、一种基于容错抗干扰控制的汽车电子门控制方法,包含以下步骤:
3、s1、根据汽车电子节气门运行原理,建立执行器故障及外部干扰下的汽车电子节气门的数学模型;
4、s2、根据所述数学模型及期望角度,得到汽车电子节气门的跟踪误差函数,设计滑模面函数;结合所述跟踪误差函数和所述滑模面函数,设计汽车电子节气门的非奇异终端滑模控制律;
5、s3、根据所述非奇异终端滑模控制律定义故障系数,使用自适应律估计所述故障系数,得到故障系数估计值;
6、s4、利用扩张状态观测器估计所述外部干扰,得到外部干扰估计值;
7、s5、将所述故障系数估计值和所述外部干扰估计值代入到非奇异终端滑模控制器中,得到非奇异终端滑模容错抗干扰控制律。
8、根据汽车电子节气门运行原理,建立执行器故障及外部干扰下的汽车电子节气门的数学模型,所述数学模型为:
9、
10、其中,f为中间变量,公式为:
11、
12、其中,θ为所述汽车电子节气门的阀片开度,ω为所述汽车电子节气门的阀片角速度,为θ的一阶导数,为ω的一阶导数,θ0为所述汽车电子节气门的初始角度,r为所述汽车电子节气门的电机电枢电阻,kt为所述汽车电子节气门的电机转矩常数,ke为所述汽车电子节气门的电机反电动势常数,ks为所述汽车电子节气门的弹簧扭矩系数,tlh为所述汽车电子节气门的弹簧预紧力矩,fc所述汽车电子节气门的阀片静态摩擦系数,n为所述汽车电子节气门的齿轮组传动比,j为所述汽车电子节气门的转动惯量,b为所述汽车电子节气门的粘性摩擦常数,d为外部干扰,u为所述汽车电子节气门的控制输入,λ为所述汽车电子节气门的执行器故障系数。
13、进一步地,定义跟踪误差为:
14、e=θ-θd;
15、其中e为跟踪误差,θd为期望值;
16、根据所述数学模型及期望值,得到汽车电子节气门的跟踪误差函数,所述跟踪误差函数的公式为:
17、
18、其中,为e的二阶导数,为θd的一阶导数。
19、进一步地,根据所述跟踪误差函数设计所述滑模面函数,所述滑模面函数的公式为:
20、
21、其中,为e的一阶导数,α、β、g、h、p、q均为正奇数,且满足
22、进一步地,结合所述滑模面函数,得到汽车电子节气门的非奇异终端滑模控制律为:
23、
24、其中,k1和k2为正实数,m和n为正奇数,且满足
25、进一步地,定义故障系数为:
26、
27、则
28、
29、使用所述自适应律估计所述故障系数,所述自适应律的公式为:
30、
31、其中,u为中间变量,为所述故障系数估计值,γ为自适应律参数。
32、进一步地,利用所述扩张状态观测器估计所述外部干扰,所述扩张状态观测器的公式为:
33、
34、其中,z1为θ的估计值,z2为ω的估计值,z3为所述外部干扰估计值,为z1、z2、z3的一阶导数,c1、c2和c3为扩张状态观测器参数。
35、进一步地,将所述非奇异终端滑模控制器中的故障系数和外部干扰项替换为所述估计值,得到非奇异终端滑模容错抗干扰控制律为:
36、
37、将所述非奇异终端滑模容错抗干扰控制律用于所述汽车电子节气门,以实现稳定控制。
38、与现有技术相比,本发明的有益效果为:
39、1、通过建立外部干扰下的汽车电子节气门数学模型,并设计非奇异终端滑模控制律,本发明能够更精确地跟踪汽车电子节气门的期望角度,减少跟踪误差。非奇异终端滑模控制方法能够提高系统的稳定性,减少超调和抖振,即使在外部环境变化或不稳定因素的影响下,也能保持控制的精确性和稳定性。
40、2、利用扩张状态观测器估计并补偿外部干扰,本发明能够有效抵抗来自环境和系统内部的干扰。通过将估计到的外部干扰纳入控制律中,能够实时调整控制策略,确保汽车电子节气门的运动更加平滑且不受意外干扰的影响,从而提高整个系统的可靠性和安全性。
41、3、通过自适应律估计故障系数,本发明能够根据实际运行条件动态调整控制参数,以适应可能出现的执行器故障。这种自适应机制使得汽车电子节气门不仅在标准操作条件下表现出色,也能在出现执行器故障时自动调整,保证汽车电子节气门的性能并优化操作效率。
技术特征:1.一种基于容错抗干扰控制的汽车电子节气门控制方法,其特征在于,包含以下步骤:
2.根据权利要求1所述的一种基于容错抗干扰控制的汽车电子节气门控制方法,其特征在于,根据汽车电子节气门运行原理,建立执行器故障及外部干扰下的汽车电子节气门的数学模型,所述数学模型为:
3.根据权利要求1所述的一种基于容错抗干扰控制的汽车电子节气门控制方法,其特征在于,定义跟踪误差为:
4.根据权利要求3所述的一种基于容错抗干扰控制的汽车电子节气门控制方法,其特征在于,根据所述跟踪误差函数设计所述滑模面函数,所述滑模面函数的公式为:
5.根据权利要求4所述的一种基于容错抗干扰控制的汽车电子节气门控制方法,其特征在于,结合所述滑模面函数,得到汽车电子节气门的非奇异终端滑模控制律为:
6.根据权利要求1所述的一种基于容错抗干扰控制的汽车电子节气门控制方法,其特征在于,根据所述非奇异终端滑模控制律定义故障系数,为:
7.根据权利要求1所述的一种基于容错抗干扰控制的汽车电子节气门控制方法,其特征在于,利用所述扩张状态观测器估计所述外部干扰,所述扩张状态观测器的公式为:
8.根据权利要求7所述的一种基于容错抗干扰控制的汽车电子节气门控制方法,其特征在于,将所述故障系数估计值和所述外部干扰估计值代入到非奇异终端滑模控制器中,得到非奇异终端滑模容错抗干扰控制律为:
技术总结本发明涉及汽车电子节气门控制技术领域,具体为一种基于容错抗干扰控制的汽车电子节气门控制方法。所述方法包括以下步骤:首先,根据汽车电子节气门运行原理,建立执行器故障及外部干扰下的汽车电子节气门的数学模型;接着,根据数学模型及期望角度,得到汽车电子节气门的跟踪误差函数,结合跟踪误差函数和滑模面函数,设计汽车电子节气门的非奇异终端滑模控制律,根据非奇异终端滑模控制律定义故障系数,使用自适应律估计故障系数,得到故障系数估计值;随后,利用扩张状态观测器估计外部干扰,得到外部干扰估计值;最后,将故障系数估计值和外部干扰估计值代入到非奇异终端滑模控制器中,得到非奇异终端滑模容错抗干扰控制律。技术研发人员:申闻宇,杨姗姗受保护的技术使用者:申闻宇技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/290917.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表