一种隧道二衬台车砼浇筑端部密实封堵装置及方法与流程
- 国知局
- 2024-09-11 15:02:35
本发明涉及隧道工程,具体为一种隧道二衬台车砼浇筑端部密实封堵装置及方法。
背景技术:
1、二衬台车作为隧道建造过程中必不可少的工具,主要用于对隧道内壁进行砼衬砌施工。在施工过程中需要对二衬台车端部进行封堵,而传统的二衬台车端部封堵常采用木模板或钢模板进行封堵,由于隧道顶部外形的不规则性,其顶部常呈现为凹凸不平,所以采用木模板或钢模板进行封堵会导致顶部封堵不实存在缝隙的情况,进而导致水分沿顶部缝隙渗漏,降低砼衬砌施工质量。且传统封堵常采用多块木模板或钢模板进行施工,操作较为复杂,施工完整性较差,施工前立模及施工后脱模的工作量及工作强度较大,工作效率较低。
2、因此现在急需一种隧道二衬台车砼浇筑端部密实封堵装置及方法,能对异形的隧道顶面的密实封堵,避免水分沿顶部缝隙渗漏,影响砼衬砌施工质量,且操作简单,能提高施工效率。
技术实现思路
1、本发明的目的之一在于提供一种隧道二衬台车砼浇筑端部密实封堵装置,能对异形的隧道顶面的密实封堵,避免水分沿顶部缝隙渗漏,影响砼衬砌施工质量,且操作简单,能提高施工效率。
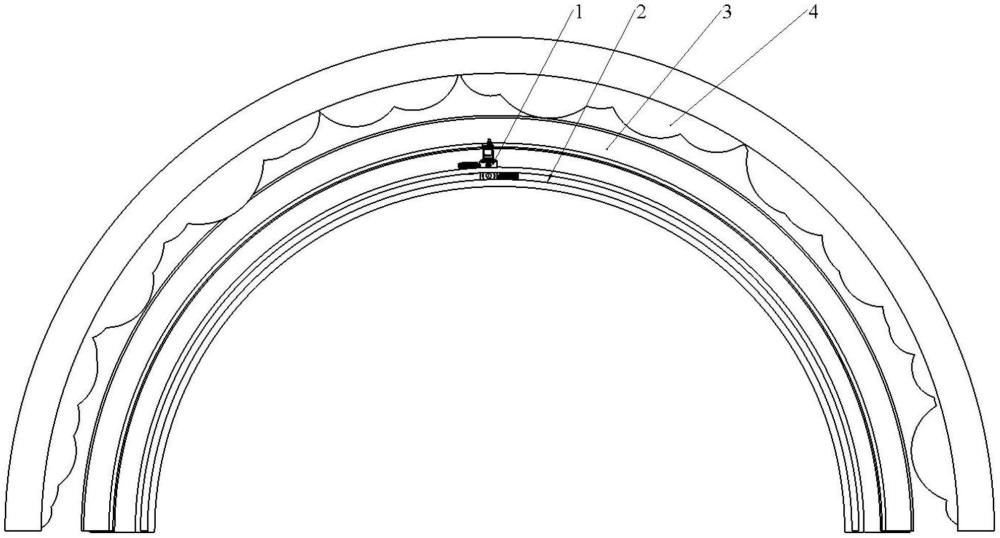
2、本发明提供的基础方案一:一种隧道二衬台车砼浇筑端部密实封堵装置,包括:弧形可调轨道模块、顶升机构模块、筒型防水袋;
3、筒型防水袋设置在弧形可调轨道模块上方;
4、顶升机构模块设置在筒型防水袋和弧形可调轨道模块之间,且与弧形可调轨道模块连接,在弧形可调轨道模块上移动,并进行顶升动作,推动筒型防水袋压紧隧道。
5、进一步,所述弧形可调轨道模块,包括:轨道主体;
6、轨道主体的顶面两边均设置有支撑座,支撑座上分别设有均匀分布的左槽和右槽;左槽和右槽即设置在左侧支撑座上的凹槽和右侧支撑座上的凹槽;
7、轨道主体两侧设置有挡板,且挡板位于支撑座上方;
8、轨道主体上沿弧形方向的中心位置设有均匀分布的中间槽;
9、所述轨道主体由若干段连续弧形可调轨道模块组成;
10、所述弧形可调轨道模块,还包括:轨道微调节装置;
11、所述轨道微调节装置,用于连接各段连续弧形可调轨道模块且对相邻连续两段弧形可调轨道模块的角度进行为调节以适用于不同弧度形状的轨道,轨道微调节装置主要由微调减速电机、连接轴、轴承组成,微调减速电机固定安装在一段弧形可调轨道模块上,轴承固定安装在弧形可调轨道模块相邻另一端弧形可调轨道模块上,连接轴与弧形可调轨道模块固定连接,连接轴安装于轴承内且与微调减速电机的输出轴固定连接。
12、进一步,所述顶升机构模块,包括:顶升装置和壳体;
13、壳体的水平垂直弧线方向两侧面均设置有主动轮和随动轮;两侧的主动轮对应放置左槽和右槽中,随动轮位于主动轮上方,对应放置在支撑座顶面;随动轮与壳体转动连接;
14、壳体侧面还设置有第一驱动电机和第二驱动电机;
15、第二驱动电机的蜗轮蜗杆与主动轮连接,通过蜗轮蜗杆传动驱动主动轮在弧形可调轨道模块的左槽和右槽内运动,同时带动随动轮沿着弧形可调轨道模块的支撑座运动;
16、壳体顶面开口,开口两侧设置有水平垂直弧线方向的滑动轨道;
17、壳体顶面上设置有滑动板,滑动板底面两边设置有滑动槽,滑动槽与滑动轨道嵌装;
18、壳体内设置有与第一驱动电机输出轴连接的主动轴,主动轴两侧沿弧线方向均设置有随动轴,一侧的随动轴与主动轴套接有第一传动皮带;两个随动轴上套接有第二级皮带,且第二级皮带与滑动板底面通过设置的连接键固定连接;第一驱动电机,用于驱动主动轴转动,进而通过第一级皮带驱动随动轴转动,使第一级皮带转动并带动滑动板沿滑动轨道移动;
19、滑动板顶面设置有双轴云台,双轴云台上设置有电动推杆模块;
20、电动推杆模块,还用于实时反馈伸缩距离及末端压力值。
21、进一步,所述筒型防水袋内部有若干隔断,隔层间采用单向阀连通;
22、筒型防水袋两端分别设置进气口与出气口,与内部设置的隔断相通,使用前采用空气泵充入0~v的空气。
23、进一步,所述筒型防水袋底面两边分别均匀设置有若干开孔,且开孔用内袋进行密封,包括:任一一边均匀间隔设置有三排开孔,且相邻两排的开孔间隔设置,第二排开孔为中间开孔,第一排开孔和第三排开孔分别为左开孔和右开孔,中间开孔中用中间内袋进行密封,左开孔中用左内袋进行密封,右开孔中用右内袋进行密封。
24、进一步,还包括:控制器,用于控制顶升机构模块的移动和顶升动作,并对位移值和推力值进行校正;
25、控制器,包括:位移控制器和推力控制器;
26、位移控制器,用于控制顶升机构模块的移动,并对位移值进行校正;
27、推力控制器,用于控制顶升机构模块的顶升动作,并对推力值进行校正。
28、进一步,所述位移控制器,用于控制顶升机构模块的移动,并对位移值进行校正,包括:通过控制第二驱动电机的启闭和功率,控制顶升机构模块沿弧形可调轨道模块移动,并进行位移值修正;通过控制第一驱动电机的启闭和功率,控制滑动板沿滑动轨道移动;
29、位移控制器根据位移模型进行控制:
30、
31、其中u(t)1为修正后的位移值,e(t)1为预期位移值s(t)和实际位移值c(t)1的差值,δkp为整定比例系数,δki为整定积分系数,δkd为整定微分系数,δe(t)1为t与t-1时刻的误差值之差,ti为积分时间常数,td为微分时间常数,t为采样周期;
32、所述推力控制器,用于控制顶升机构模块的顶升动作,并对推力值进行校正,包括:通过控制电动推杆模块,控制顶升机构模块的顶升动作,并对推力值进行校正;
33、推力控制器根据推力模型进行控制:
34、
35、其中u(t)2为修正后的位移值,e(t)2为预期位移值f(t)和实际位移值c(t)2的差值,k为增益系数,t为滞后时间,ts为惯性时间常数。
36、本方案的有益效果:本置安装于二衬台车两侧,可随二衬台车移动;筒型防水袋在开始寻定位前只充部分气体,以便于压紧,控制器通过控制第二驱动电机的启闭和功率,控制顶升机构模块沿弧形可调轨道模块移动,并进行位移值修正;控制器通过控制第一驱动电机的启闭和功率,控制滑动板沿滑动轨道移动;控制器控制电动推杆模块的伸缩和推力,控制顶升机构模块的顶升动作,并进行推力值修正,实现对所有开孔中内袋的推动,进而推动筒型防水袋压紧隧道;对定位后的各个隧道缝隙点采用人工固定支撑杆的方式对其进行固定锁紧,固定锁紧后将筒型防水袋充满气体,以实现对隧道缝隙的密实封堵;具体地,控制器模块,包括:包括:位移控制器和推力控制器;位移控制器采用vpid控制器,根据位移模型进行控制,位移模型通过vpid算法构建,推力控制器采用p控制器,根据推力模型进行控制,其中推力模型通过改进的模糊控制算法构建,能实时准确对位移和推力进行修正,保障封堵的准确性;
37、与现有技术相比,本方案可以对形状、大小各异的隧道顶端的密实封堵,避免施工过程中水分渗漏,且其结构简单,可实现整体性封堵,提高工程质量;并且本方案中控制器会进行自动寻位,且会对位移值和推力值修正,保障寻位的准确性,对隧道顶部不规则缝隙的自动寻定位,极大提高施工效率。
38、综上,本方案能对异形的隧道顶面的密实封堵,避免水分沿顶部缝隙渗漏,影响砼衬砌施工质量,且操作简单,能提高施工效率。
39、本发明的目的之二在于提供一种隧道二衬台车砼浇筑端部密实封堵方法,能对异形的隧道顶面的密实封堵,避免水分沿顶部缝隙渗漏,影响砼衬砌施工质量,且操作简单,能提高施工效率。
40、本发明提供基础方案二:一种隧道二衬台车砼浇筑端部密实封堵方法,采用上述隧道二衬台车砼浇筑端部密实封堵装置,包括如下内容:
41、s1、将筒型防水袋设置在弧形可调轨道模块与隧道之间,且在筒型防水袋内充入体积为v的空气,控制器控制顶升机构模块移动到中间开孔下方;
42、s2、控制器控制电动推杆模块对准中间内袋后电动推杆模块开始伸长;
43、s3、电动推杆模块推杆穿过筒型防水袋中间开孔推动中间内袋压紧隧道,同时推杆继续伸长;
44、s4、当电动推杆模块顶到隧道最低点,推力继续增大,当推力增大到预设最大值,电动推杆模块停止运动,装置进入等待状态,将顶杆顶住定位点,顶杆另一端顶在隧道上的中间槽上;
45、s5、控制器控制顶升机构模块移动到下一中间开孔下方,并执行s2-s4,至完成所有中间内袋对的定位支撑后,执行s6;
46、s6、控制器控制电动推杆模块沿垂直于隧道横截面的方向向左移动到左开孔下方,并对所有左开孔执行s2-s5,至完成所有左内袋的定位支撑后,执行s7;
47、s7、控制器控制电动推杆模块沿垂直于隧道横截面的方向向右移动到右开孔下方,并对所有右开孔执行s2-s5,至完成所有右内袋的定位支撑。
48、进一步,控制器控制顶升机构模块移动到下一开孔下方为:控制器,根据距离值l,通过位移模型,进行位移值修正,输出输出量作为位移值,顶升机构模块根据位移值移动到下一开孔,包括:
49、将距离值l,作为预期位移值s(t);
50、实时获取顶升机构模块的实际位移c(t)1,具体地,对于顶升机构模块的实际位移c(t)1,通过设置编码器获取并实时进行反馈,以使控制器实时获取顶升机构模块的实际位移c(t)1;
51、根据s(t)和c(t)1,获取控制偏差e(t)1,具体地,预期位移值s(t)与实际位移值c(t)1作差得到控制偏差e(t)1;
52、根据e(t)1,通过位移模型,进行位移值修正,输出输出量u(t)1,作为修正后的位移值:
53、
54、其中u(t)1为修正后的位移值,e(t)1为预期位移值s(t)和实际位移值c(t)1的差值,δkp为整定比例系数,δki为整定积分系数,δkd为整定微分系数,δe(t)1为t与t-1时刻的误差值之差,ti为积分时间常数,td为微分时间常数,t为采样周期;
55、判断u(t)1与s(t)之差是否符合预设位移差范围,若是,则输出u(t)1;若否,则再执行实时获取顶升机构模块的实际位移c(t)1;
56、顶升机构模块根据输出的u(t)1移动到下一开孔,从而控制顶升机构模块精准稳定地到达预定位点并使电动推杆模块对准内袋。
57、进一步,当电动推杆模块顶到隧道最低点,推力继续增大,当推力增大到预设最大值,电动推杆模块停止运动,装置进入等待状态,包括:
58、根据施工要求,确定预设最大值f(t)作为预期推力值;
59、电动推杆模块开始运动后,当电动推杆模块的推杆接触隧道时,获取实际推力值c(t)2,具体地,通过电动推杆模块的末端力传感器反馈力值c(t)2,获取实际推力值c(t)2;
60、根据f(t)和c(t)2,获取控制偏差e(t)2,具体地,预期推力值f(t)与实际推力值作差得到控制偏差e(t)2;
61、根据e(t)2,通过推力模型,进行位移值修正,输出输出量u(t)2,作为推力值,进行运行指令的下发:
62、
63、其中u(t)2为修正后的位移值,e(t)2为预期位移值f(t)和实际位移值c(t)2的差值,k为增益系数,t为滞后时间,ts为惯性时间常数;
64、判断u(t)2与f(t)之差是否符合预设推力差范围,若是,则输出u(t)2,对c(t)2进行修正;若否,则再执行获取实际推力值c(t)2;
65、电动推杆模块停止运动,顶升机构模块进入等待指令状态,当接收下个运行指令或等待时间超过预设等待时间后进入下一个运行指令循环,进而找到下一个开孔。
66、本方案的有益效果:本方案可以对形状、大小各异的隧道顶端的密实封堵,避免施工过程中水分渗漏,且其结构简单,可实现整体性封堵,提高工程质量;并且本方案中控制器会进行自动寻位,且会对位移值和推力值修正,保障寻位的准确性,对隧道顶部不规则缝隙的自动寻定位,极大提高施工效率。本方案能对异形的隧道顶面的密实封堵,避免水分沿顶部缝隙渗漏,影响砼衬砌施工质量,且操作简单,能提高施工效率。
本文地址:https://www.jishuxx.com/zhuanli/20240911/292975.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表