一种海产品加工装置及其加工工艺的制作方法
- 国知局
- 2024-09-11 15:03:43
本发明涉及的一种海产品加工装置及其加工工艺,特别是涉及应用于牡蛎加工领域的一种海产品加工装置及其加工工艺。
背景技术:
1、在进行牡蛎开壳处理时,大多需要采用人工处理,利用可活动的操作手柄带动结构定点下压进而实现破壳处理,之后人工手动掰开牡蛎壳,这样的操作会使得牡蛎的开壳效率较低。
2、为解决牡蛎开壳效率低的问题,市场中的某牡蛎开壳设备采用自动化开壳的设计,具有一定的市场占比。
3、中国发明专利cn202110895991.4说明书公开了一种牡蛎自动开壳机和牡蛎开壳方法,涉及加工设备领域,牡蛎自动开壳机包括牡蛎固定机构、第一驱动机构、开壳机构;所述第一驱动机构能够带动所述开壳机构向靠近或远离所述牡蛎固定机构的方向运动;所述开壳机构包括压针、开壳手指、第二驱动机构,两组开壳手指分别位于所述压针的两侧,所述第二驱动机构能够带动两组开壳手指相互靠近或者相互远离。本发明的优点在于:通过开壳手指模仿人工开壳,实现了自动牡蛎开壳,降低了劳动强度,提高了生产效率。
4、但是上述牡蛎开壳设备仅仅通过开壳手指的背向运动来替代手动掰开牡蛎壳,在实际开壳过程中,压针下压后产生的缝隙较小,开壳手指与压针之间存在一定的水平间隙,且开壳手指与压针的尾端高度差距不大,使得开壳后开壳手指进入牡蛎内部的难度加大,进而影响开壳操作的顺利进行。
技术实现思路
1、针对上述现有技术,本发明要解决的技术问题是在不破坏牡蛎内部肉体的前提下,实现压制结构的旋转撑开以及扒开牡蛎壳结构的延迟进入效果。
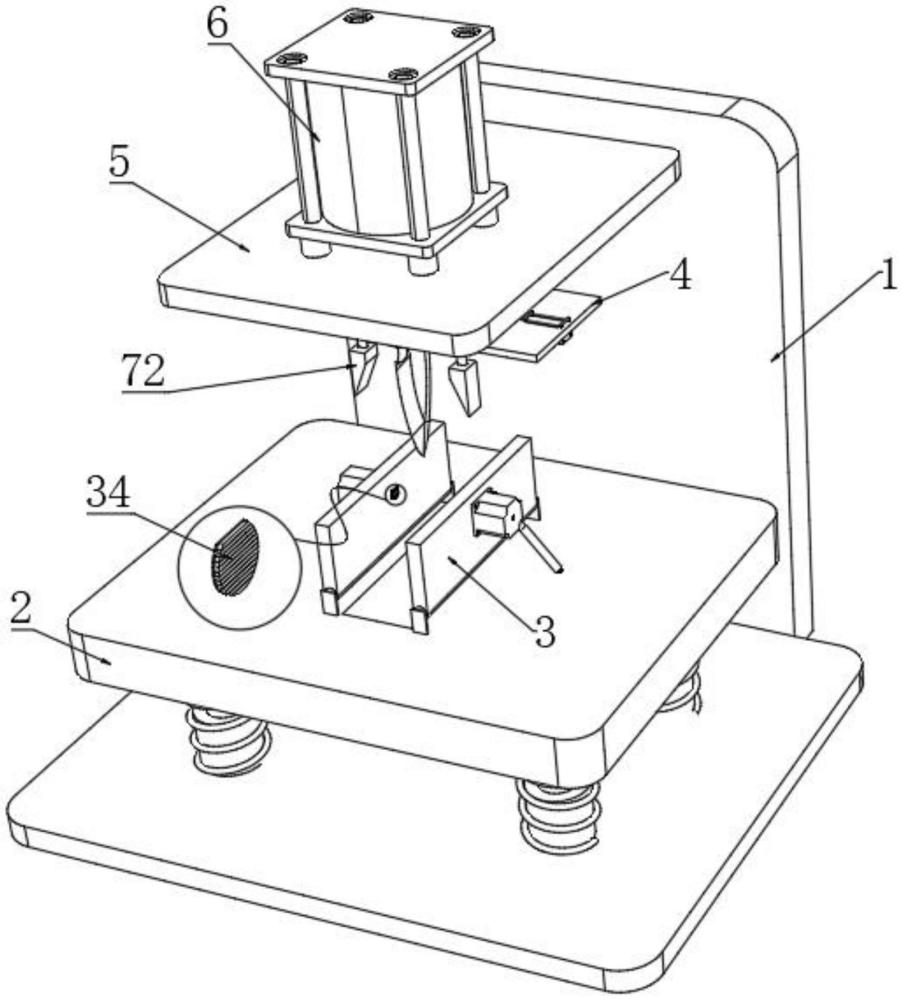
2、为解决上述问题,本发明提供了一种海产品加工装置及其加工工艺,包括截面为l型的固定座,固定座的顶部连接有弹簧伸缩柱,弹簧伸缩柱的顶部安装有放置板,放置板的内部设有调整槽,放置板的顶部安装有调整夹持单元,固定座的正面安装有顶部平台,顶部平台的顶部通过支柱安装有小型升降气缸,小型升降气缸的输出端连接有活动杆,顶部平台的下方布置有中间平台,中间平台的内部贯穿连接有圆杆,圆杆的尾端连接有开壳刀,中间平台的顶部安装有压制旋转单元,压制旋转单元包括有旋转齿轮,且旋转齿轮套接于圆杆的顶端外表面,中间平台的上方安装有伺服驱动马达,且伺服驱动马达的输出端与圆杆的顶端连接,伺服驱动马达的顶端与活动杆的底端连接,开壳刀的两侧安装有自掰单元。
3、在上述海产品加工装置中,利用开壳刀开壳后的旋转操作加大牡蛎壳表面的撑开缝隙,从而使得后续背向运动的开壳块延迟下落,随后得以顺利进入牡蛎壳开口内进而彻底扒开牡蛎壳,实现牡蛎开壳的自动化处理,通过改变传统的手工加工工艺,利用设备减少用工,提升产能,减少成本。
4、作为本申请的进一步改进,自掰单元包括有开壳块,中间平台的底部设有位于开壳刀两侧的滑槽,滑槽的内部滑动连接有调节杆,调节杆包括有固定杆,固定杆的外部滑动套接有套接滑杆,且开壳块连接于套接滑杆的底部,中间平台的两侧镶嵌安装有驱动气缸,且驱动气缸的输出端与固定杆的表面连接。
5、作为本申请的再进一步改进,套接滑杆的顶部安装有磁吸环,中间平台的顶部安装有位于圆杆两侧的轴杆,轴杆的表面均固定套接有随动约束齿轮,且随动约束齿轮的底部均镶嵌安装有与磁吸环相互吸引的磁吸块,随动约束齿轮与旋转齿轮相互啮合连接。
6、作为本申请的更进一步改进,磁吸块与磁吸环之间的磁吸作用力小于伺服驱动马达的转矩作用力,且磁吸块与磁吸环在初始状态下处于同一竖直轴线上,伺服驱动马达的顶部一侧安装有与小型升降气缸电性连接的触动开关。
7、作为本申请的更进一步改进,调整夹持单元包括有通过轴架与放置板顶部表面连接的约束板,且调整槽的截面为上宽下窄设计。
8、作为本申请的更进一步改进,放置板的顶部通过轴件连接有小型电动伸缩杆,且小型电动伸缩杆的输出端通过轴件与约束板安装有伺服马达的表面活动连接。
9、作为本申请的更进一步改进,放置板的底部点对称安装有支架,且支架的尾端连接有光电感应器,光电感应器与伺服马达电性连接,约束板的一侧表面的中部安装有伺服马达,伺服马达的输出端贯穿延伸至约束板的另一侧表面且连接有摩擦块。
10、作为本申请的又一种改进,开壳块的内部镶嵌安装有电磁块,开壳块的一侧表面通过轴件活动连接有弧形约束板,且弧形约束板靠近开壳块的表面设有摩擦纹,弧形约束板与开壳块通过张开弹簧连接,且张开弹簧的表面涂覆有与电磁块相互吸引的磁吸涂层。
11、作为本申请的又一种改进的补充,弧形约束板为弹性材料制成,且弧形约束板与开壳块的重合高度值小于弧形约束板自身高度值的二分之一。
12、一种海产品加工装置的加工工艺,包括有以下工作步骤:
13、s1、将牡蛎放进放置板内的调整槽中,利用调整夹持单元将调整槽内的牡蛎调整为上窄下宽的放置方式;
14、s2、启动小型升降气缸,带动开壳刀下落,对牡蛎进行开口后,启动伺服驱动马达带动旋转齿轮以及开壳刀转动,加大牡蛎壳开口的缝隙宽度;
15、s3、随后利用自掰单元,将撑开后的牡蛎扒开处理。
16、综上所述,本申请通过调整夹持单元,能够对放置在调整槽内的姿势不正确的牡蛎予以姿势调整,使得牡蛎厚且窄的一端朝上,之后在压制旋转单元的辅助下,利用开壳刀开壳后的旋转操作加大牡蛎壳表面的撑开缝隙,从而使得后续背向运动的开壳块延迟下落,随后得以顺利进入牡蛎壳开口内进而彻底扒开牡蛎壳,实现牡蛎开壳的自动化处理。
技术特征:1.一种海产品加工装置,包括截面为l型的固定座(1),其特征在于:所述固定座(1)的顶部连接有弹簧伸缩柱,所述弹簧伸缩柱的顶部安装有放置板(2),所述放置板(2)的内部设有调整槽(31),所述放置板(2)的顶部安装有调整夹持单元(3),所述固定座(1)的正面安装有顶部平台(5),所述顶部平台(5)的顶部通过支柱安装有小型升降气缸(6),所述小型升降气缸(6)的输出端连接有活动杆(61),所述顶部平台(5)的下方布置有中间平台(4),所述中间平台(4)的内部贯穿连接有圆杆,所述圆杆的尾端连接有开壳刀(81),所述中间平台(4)的顶部安装有压制旋转单元(8),所述压制旋转单元(8)包括有旋转齿轮(84),且旋转齿轮(84)套接于圆杆的顶端外表面,所述中间平台(4)的上方安装有伺服驱动马达(82),且伺服驱动马达(82)的输出端与圆杆的顶端连接,所述伺服驱动马达(82)的顶端与活动杆(61)的底端连接,所述开壳刀(81)的两侧安装有自掰单元(7)。
2.根据权利要求1所述的一种海产品加工装置,其特征在于:所述自掰单元(7)包括有开壳块(72),所述中间平台(4)的底部设有位于开壳刀(81)两侧的滑槽(41),所述滑槽(41)的内部滑动连接有调节杆(73),所述调节杆(73)包括有固定杆(731),所述固定杆(731)的外部滑动套接有套接滑杆(732),且开壳块(72)连接于套接滑杆(732)的底部,所述中间平台(4)的两侧镶嵌安装有驱动气缸(71),且驱动气缸(71)的输出端与固定杆(731)的表面连接。
3.根据权利要求2所述的一种海产品加工装置,其特征在于:所述套接滑杆(732)的顶部安装有磁吸环(733),所述中间平台(4)的顶部安装有位于圆杆两侧的轴杆,所述轴杆的表面均固定套接有随动约束齿轮(85),且随动约束齿轮(85)的底部均镶嵌安装有与磁吸环(733)相互吸引的磁吸块(851),所述随动约束齿轮(85)与旋转齿轮(84)相互啮合连接。
4.根据权利要求3所述的一种海产品加工装置,其特征在于:所述磁吸块(851)与磁吸环(733)之间的磁吸作用力小于伺服驱动马达(82)的转矩作用力,且磁吸块(851)与磁吸环(733)在初始状态下处于同一竖直轴线上,所述伺服驱动马达(82)的顶部一侧安装有与小型升降气缸(6)电性连接的触动开关(83)。
5.根据权利要求1所述的一种海产品加工装置,其特征在于:所述调整夹持单元(3)包括有通过轴架与放置板(2)顶部表面连接的约束板(33),且调整槽(31)的截面为上宽下窄设计。
6.根据权利要求5所述的一种海产品加工装置,其特征在于:所述放置板(2)的顶部通过轴件连接有小型电动伸缩杆(35),且小型电动伸缩杆(35)的输出端通过轴件与约束板(33)安装有伺服马达(36)的表面活动连接。
7.根据权利要求5所述的一种海产品加工装置,其特征在于:所述放置板(2)的底部点对称安装有支架,且支架的尾端连接有光电感应器(32),所述光电感应器(32)与伺服马达(36)电性连接,所述约束板(33)的一侧表面的中部安装有伺服马达(36),所述伺服马达(36)的输出端贯穿延伸至约束板(33)的另一侧表面且连接有摩擦块(34)。
8.根据权利要求2所述的一种海产品加工装置,其特征在于:所述开壳块(72)的内部镶嵌安装有电磁块(721),所述开壳块(72)的一侧表面通过轴件活动连接有弧形约束板(723),且弧形约束板(723)靠近开壳块(72)的表面设有摩擦纹,所述弧形约束板(723)与开壳块(72)通过张开弹簧(722)连接,且张开弹簧(722)的表面涂覆有与电磁块(721)相互吸引的磁吸涂层。
9.根据权利要求8所述的一种海产品加工装置,其特征在于:所述弧形约束板(723)为弹性材料制成,且弧形约束板(723)与开壳块(72)的重合高度值小于弧形约束板(723)自身高度值的二分之一。
10.一种根据权利要求1所述的海产品加工装置的加工工艺,其特征在于,包括有以下工作步骤:
技术总结本发明涉及一种海产品加工装置及其加工工艺,包括截面为L型的固定座,放置板的内部设有调整槽,放置板的顶部安装有调整夹持单元,小型升降气缸的输出端连接有活动杆,中间平台的顶部安装有压制旋转单元,压制旋转单元包括有旋转齿轮,中间平台的上方安装有伺服驱动马达,开壳刀的两侧安装有自掰单元,本申请通过调整夹持单元,能够对放置在调整槽内的姿势不正确的牡蛎予以姿势调整,使得牡蛎厚且窄的一端朝上,之后在压制旋转单元的辅助下,利用开壳刀开壳后的旋转操作加大牡蛎壳表面的撑开缝隙,从而使得后续背向运动的开壳块延迟下落,随后得以顺利进入牡蛎壳开口内进而彻底扒开牡蛎壳,实现牡蛎开壳的自动化处理。技术研发人员:林森赐,陈晓东,林明福,沈国钦,吴辉钦受保护的技术使用者:诏安县兴港水产食品有限公司技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/293045.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表