一种基于摇臂IMU的采煤机采高测量方法
- 国知局
- 2024-09-14 14:33:17
本发明属于矿用设备运行状态监测领域的一种采煤机采高测量方法,尤其涉及了一种基于摇臂imu的采煤机采高测量方法。
背景技术:
1、采煤机的采高测量是煤矿开采过程中的一个重要环节,传统的测量方法主要依赖于安装在摇臂与机身的传感器来检测摇臂的工作角度,并通过这些数据进一步计算出采高。然而,这种方法存在一定的局限性,因为它容易受到摇臂畸变或传感器磨损等因素的影响,从而可能导致测量结果的不准确。随着传感器技术的不断进步,imu小型化和性能提升为传感器在动态环境下的应用提供了新的可能性。现代的惯性测量单元(imu)传感器可以安装在采煤机等动态设备上,实时获取丰富的载体信息,这对于精确地绘制出设备的动态轨迹具有巨大的潜力。在数据分析领域,基于统计学习理论的支持向量机(svm)方法已经证明能够有效地在有限的样本情况下获得结构风险最小化的最优解。这种方法已经被广泛应用于故障诊断和回归分析等多个领域,为设备的智能监控和维护提供了强大的工具。与此同时,矿井行业的无人化趋势对远程监控和控制提出了更高的要求。为了实现智能和安全的开采目标,远端控制台需要能够获取到充足且精确的设备信息。这不仅要求传感器技术的高度发展,也需要先进的数据处理和分析方法来确保信息的准确性和实时性。
2、综上所述,采煤机的采高测量和监控正面临着技术革新的机遇与挑战。
技术实现思路
1、为了解决背景技术中的需求和问题,本发明提出了一种基于摇臂传感器的采煤机采高测量方法,本发明利用imu的小型化和性能提升的特性,结合支持向量机等先进的数据分析技术,为实现矿井行业的无人化和智能化开采提供了技术基础和解决方案。
2、本发明的技术方案如下:
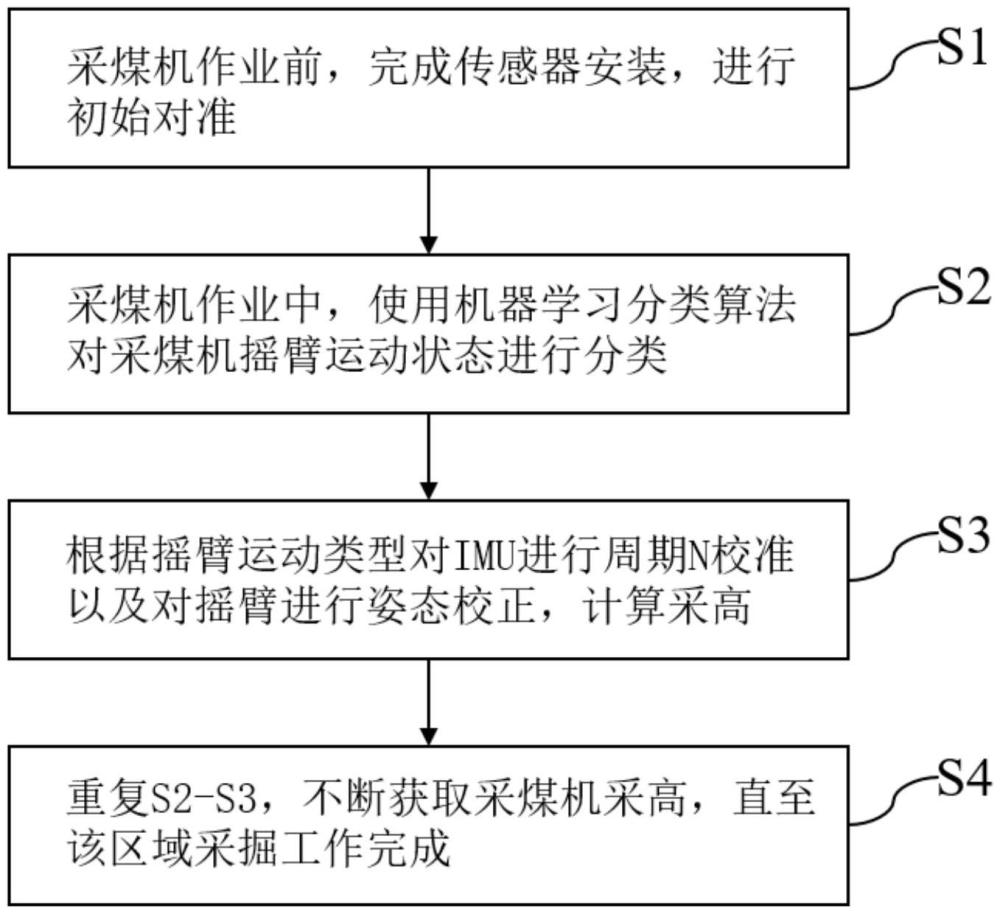
3、s1:采煤机作业前,将惯性测量单元imu安装于采煤机摇臂上并在静止状态下完成初始对准,以及在摇臂与机身连接处安装旋转编码器;
4、s2:采煤机作业中,根据惯性测量单元imu输出的原始数据以及捷联惯导算法解算后的姿态数据,使用机器学习分类方法对采煤机摇臂运动状态进行识别,获得摇臂运动类型;
5、s3:根据摇臂运动类型对惯性测量单元imu进行周期n校准以及对摇臂进行姿态校正,接着计算获得采煤机采高;
6、s4:重复s2-s3,不断获取采煤机采高,直至该区域采掘工作完成。
7、所述s3中,若摇臂运动类型为定高状态,则基于平稳割煤时间的姿态对惯性测量单元imu进行周期n下的姿态校准。
8、所述基于平稳割煤时间的姿态对惯性测量单元imu进行周期n下的姿态校准,具体为:
9、在每个周期n下,利用滑动窗口的方法对每次处于定高状态的姿态数据进行均值更新后,获得当前定高状态结束时的姿态数据。
10、所述s3中,若摇臂运动类型为调高状态,则利用姿态传递的方式对惯性测量单元imu进行周期n下的姿态校准。
11、所述利用姿态传递的方式对惯性测量单元imu进行周期n下的姿态校准,具体为:
12、根据摇臂与机身夹角α计算摇臂与采煤机机体之间的旋转矩阵再利用旋转矩阵对惯性测量单元imu进行姿态校准。
13、所述s3中,周期n的计算公式如下:
14、n=0.1/q
15、其中,q表示安装于摇臂的imu零偏不稳定性值。
16、所述s3中,根据旋转编码器的摇臂倾角判断摇臂是否回至初始位置,若回至初始位置,则进行一次摇臂的姿态校正。
17、所述s1中,惯性测量单元imu安装在摇臂与滚筒连接处,用于采集滚筒圆心处姿态。
18、所述s2中,机器学习分类方法为采煤机摇臂运动状态分类器,采煤机摇臂运动状态分类器是利用切割数据集对svm分类器训练获得的。
19、所述s3中,采煤机采高的计算公式如下:
20、
21、其中,pb为采煤机机体坐标系下的位置,为导航坐标系到采煤机机体坐标系的旋转矩阵,pn为导航坐标系下的位置,d为采煤机滚筒直径。
22、本发明的有益效果为:
23、本发明利用imu的小型化和性能提升的特性,结合支持向量机等先进的数据分析方法,实现了采煤机采高的测量,避免了传统方法受到摇臂发生畸变或者连接处传感器磨损的影响,有助于减轻综采面对工人的依赖度,进一步推进煤矿智能化,为实现矿井行业的无人化和智能化开采提供了技术基础和解决方案。
技术特征:1.一种基于摇臂imu的采煤机采高测量方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于摇臂imu的采煤机采高测量方法,其特征在于,所述s3中,若摇臂运动类型为定高状态,则基于平稳割煤时间的姿态对惯性测量单元imu进行周期n下的姿态校准。
3.根据权利要求2所述的一种基于摇臂imu的采煤机采高测量方法,其特征在于,所述基于平稳割煤时间的姿态对惯性测量单元imu进行周期n下的姿态校准,具体为:
4.根据权利要求1所述的一种基于摇臂imu的采煤机采高测量方法,其特征在于,所述s3中,若摇臂运动类型为调高状态,则利用姿态传递的方式对惯性测量单元imu进行周期n下的姿态校准。
5.根据权利要求4所述的一种基于摇臂imu的采煤机采高测量方法,其特征在于,所述利用姿态传递的方式对惯性测量单元imu进行周期n下的姿态校准,具体为:
6.根据权利要求1-5任一所述的一种基于摇臂imu的采煤机采高测量方法,其特征在于,所述s3中,周期n的计算公式如下:
7.根据权利要求1所述的一种基于摇臂imu的采煤机采高测量方法,其特征在于,所述s3中,根据旋转编码器的摇臂倾角判断摇臂是否回至初始位置,若回至初始位置,则进行一次摇臂的姿态校正。
8.根据权利要求1所述的一种基于摇臂imu的采煤机采高测量方法,其特征在于,所述s1中,惯性测量单元imu安装在摇臂与滚筒连接处,用于采集滚筒圆心处姿态。
9.根据权利要求1所述的一种基于摇臂imu的采煤机采高测量方法,其特征在于,所述s2中,机器学习分类方法为采煤机摇臂运动状态分类器,采煤机摇臂运动状态分类器是利用切割数据集对svm分类器训练获得的。
10.根据权利要求1所述的一种基于摇臂imu的采煤机采高测量方法,其特征在于,所述s3中,采煤机采高的计算公式如下:
技术总结本发明公开了一种基于摇臂IMU的采煤机采高测量方法。采煤机作业前,将惯性测量单元IMU安装于采煤机摇臂上并在静止状态下完成初始对准,以及在摇臂与机身连接处安装旋转编码器;在采煤机作业中,使用支持向量机分类器判别摇臂运动状态,辅助采高测量,另外,通过机身自主定位系统辅助,进行周期性校准以提升测量精度。本发明使用摇臂IMU对采煤机采高进行测量,避免了传统方法受到摇臂发生畸变或者连接处传感器磨损的影响,有助于减轻综采面对工人的依赖度,进一步推进煤矿智能化。技术研发人员:胡慧珠,商子琴,李冠男,权思航,陈杏藩受保护的技术使用者:浙江大学技术研发日:技术公布日:2024/9/12本文地址:https://www.jishuxx.com/zhuanli/20240914/294734.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。