一种面向有/无人编队的智能机系统及其计算资源调用方法与流程
- 国知局
- 2024-09-19 14:24:22
本发明涉及有/无人编队协同计算领域,具体涉及一种面向有/无人编队的智能机系统及其计算资源调用方法。
背景技术:
1、自20世纪初以来,低成本且高度灵活的无人机已被广泛应用于现代战场,以执行侦察、监视和攻击任务。然而,单个无人机存在可扩展性有限、生存能力弱以及任务执行速度缓慢等问题。为了克服这些局限,无人机集群技术,如darpa的gremlins(小精灵)和perdix(山鹑)应运而生,旨在通过数量优势和协同作战来增强无人机的效能。尽管如此,仅依赖无人机编队的作战方式在关键时刻的可靠性仍低于人类操控的系统,尤其是在通信信号质量不佳或作战环境复杂的条件下。
2、为了提升作战的可靠性和灵活性,有/无人编队的概念逐渐形成,即结合了有人驾驶的指挥平台与无人驾驶的执行单元。这种编队利用了人工智能技术增强无人系统的自主作战能力,实现了人机协同的高效作战模式。2018年8月,美国国防部发布的《2017-2042财年无人系统综合路线图》明确指出,通过人工智能提升无人系统自主作战能力,实现“有人-无人”作战协同的体系化作战是未来发展的重点方向。
3、我国在编队作战领域的人工智能技术应用方面也进行了深入研究。以目标检测技术为例,现有技术中主流的解决方案是在每架无人机上搭载高性能的计算单元,当发现目标时,将计算任务在编队内部进行协同任务分配,利用分布式计算提高识别精度和速度。然而,这种方案不仅增加了无人机的成本,而且由于战场环境的不确定性,无人机组网的不稳定性导致了额外的设备认证操作,增加了系统开发的复杂度。更重要的是,网络变动时的反复任务重新分配降低了整体计算效率,影响了目标检测的实时性和准确性。
4、因此,迫切需要一种新的方案,能够在不显著增加成本的前提下,提高无人机编队在复杂战场环境下的目标检测能力,同时减少系统复杂度和计算效率损失,进而确保有/无人编队在执行任务时的高效性和可靠性。
技术实现思路
1、针对有/无人编队的应用场景,如何利用无人机的特性拓展有人机的探测范围,保留无人机低成本优势并使编队具备高计算效率,是本发明主要解决的技术问题;因此,本发明提出了一种面向有/无人编队的智能机系统及其计算资源调用方法。本发明中的无人机仅搭载低成本的基础单元,负责传输探测数据;有人机则搭载高性能计算单元,作为计算中心,负责目标检测;本发明在扩大探测范围的同时,保留了无人机低成本的优势,同时维持整个有/无人编队的高计算效率。
2、本发明采用了以下技术方案来实现目的:
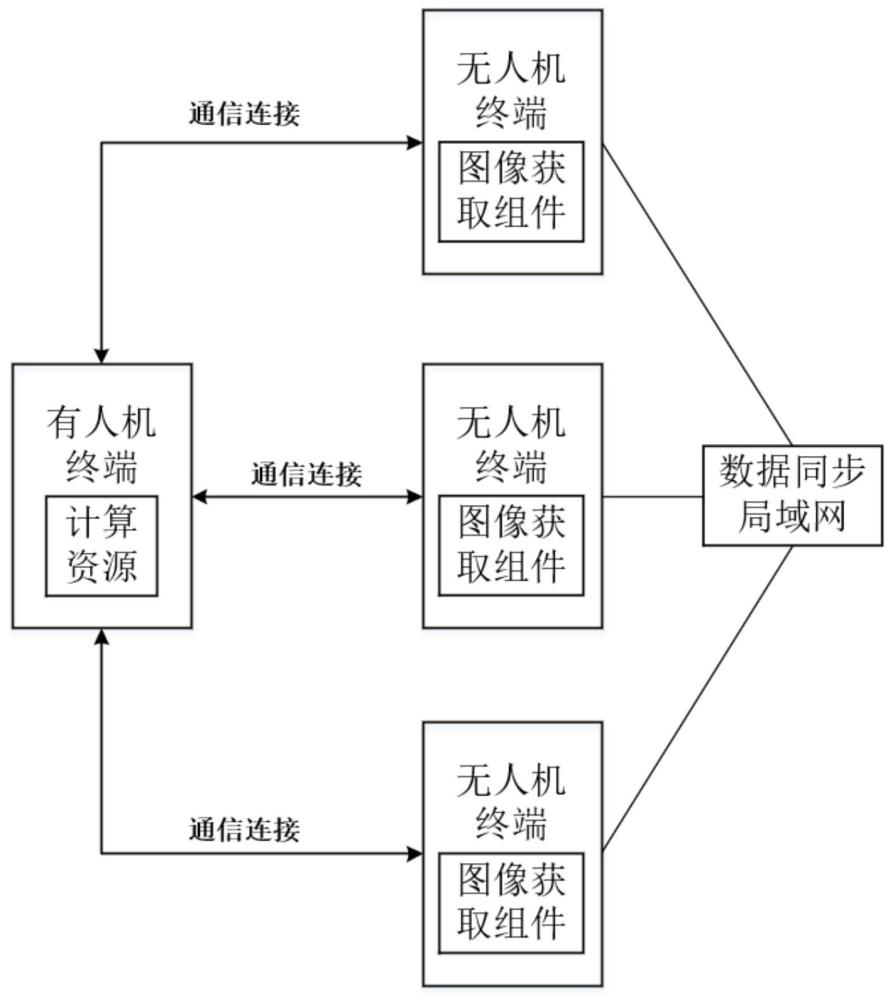
3、一种面向有/无人编队的智能机系统,所述智能机系统包括至少一个有人机终端和多个无人机终端,多个无人机终端之间通过分布式软总线通信连接,并以自组网方式建立有数据同步局域网;数据同步局域网用于同步传输每个无人机终端单独获取的图像数据,并将同步完成的图像数据存储于每个无人机终端中;每个无人机终端均与有人机终端之间通信连接,有人机终端搭载有计算资源,计算资源用于从任意无人机终端中接收同步完成的图像数据并进行计算,得出目标检测结果后发送至对应无人机终端,再通过数据同步局域网同步至每个无人机终端。
4、进一步的,有人机终端具有openeuler操作系统,openeuler操作系统用于提供封装接口给每个无人机终端,使每个无人机终端通过http协议调用方式与有人机终端建立通信连接。
5、进一步的,openeuler操作系统中部署有作为计算资源的目标检测模块,目标检测模块用于依据接收的同步完成的图像数据,进行目标检测计算,得出目标检测结果并通过openeuler操作系统向无人机终端反馈。
6、进一步的,每个无人机终端均具有openharmony操作系统,openharmony操作系统用于进行多个无人机终端之间的自组网,从而建立数据同步局域网;数据同步局域网还用于无人机终端的自动发现、自动连接和数据校验。
7、进一步的,openharmony操作系统中部署有数据同步模块,每个无人机终端均具有各自的图像数据库;数据同步模块与其所在的无人机终端的图像数据库相连接,数据同步模块用于提供分布式软总线中间件,进行多个无人机终端之间的自组网,使图像数据库中的图像数据通过数据同步局域网在不同无人机终端之间同步传输,以及对图像数据库中暂存的图像数据进行逻辑与业务处理。
8、进一步的,openharmony操作系统中部署有人机交互模块,人机交互模块用于通过arkui开发框架提供上层应用,以及通过调用openharmony操作系统提供的组件库的方式构建人机交互界面,并将人机交互界面通过通信方式提供至有人机终端。
9、本发明还提供一种智能机系统的计算资源调用方法,所述资源计算方法的硬件基础为前述的智能机系统;当有/无人编队进行目标检测任务时,资源计算方法包括如下步骤:
10、s1、有人机终端通过openeuler操作系统,向每个无人机终端提供封装接口,建立与每个无人机终端的http协议通信;
11、s2、每个无人机终端通过openharmony操作系统中部署的人机交互模块,向有人机终端提供对应的人机交互界面,进行多个无人机终端的自组网;
12、s3、自组网过程采用分布式软总线,建立数据同步局域网;每个无人机终端通过各自的图像获取组件获取图像数据并存储;
13、s4、通过数据同步局域网将多个无人机终端获取的图像数据进行同步,并将同步完成的图像数据再次存储;
14、s5、任意一个无人机终端通过http协议调用有人机终端的封装接口,向有人机终端发送计算请求并传输同步完成的图像数据;
15、s6、有人机终端使用计算资源对接收的图像数据进行计算,得出目标检测结果后发送至对应无人机终端;
16、s7、对应无人机终端接收目标检测结果后,通过数据同步局域网将目标检测结果同步至其余的无人机终端。
17、综上所述,由于采用了本技术方案,本发明的有益效果如下:
18、在本发明中,无人机作为探测单位,仅搭载基础计算单元,有效降低了单个平台的成本,同时利用其机动性优势,极大提升了探测效率。有人机则集中处理复杂计算任务,避免了无人机对昂贵计算资源的需求,从而实现了整体成本的有效控制。无人机的广泛部署可显著增加战场态势感知能力,而有人机则确保了目标检测和数据分析的高效性,二者互补,实现了探测范围与计算能力的最佳平衡。
19、基于分布式软总线技术,实现无人机集群之间及无人机与有人机之间的无缝通信与数据同步,本发明可确保信息的实时共享与快速响应,从而提高有/无人编队的整体智能化水平。openharmony操作系统用于无人机终端,openeuler操作系统用于有人机终端,依托分布式软总线中间件简化了网络架构,降低了软件开发的复杂度,促进了系统的快速部署与升级。
20、本发明的应用充分选择了国产自研软硬件,不仅保障了系统的安全可控性,还增强了系统的可维护性和适应性,为后续的系统升级和功能拓展提供了坚实基础。国产软硬件的使用确保了系统的透明度,便于故障排查与性能优化,同时提升了整个系统的可靠性,满足了特定任务场景对系统稳定性的严格要求。
本文地址:https://www.jishuxx.com/zhuanli/20240919/297886.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
基于多波束的水声通信系统
下一篇
返回列表