多模式超冗余绳驱动捕获机械手、系统及自适应捕获方法
- 国知局
- 2024-09-19 14:39:48
本发明涉及机械手捕获领域,具体涉及一种多模式超冗余绳驱动捕获机械手、系统及自适应捕获方法。
背景技术:
1、随着人类太空技术的进步与发展,各国对宇宙空间的探索愈加深入,大量的探测器与卫星被发射到环地球轨道上,随之也产生了大量的因为机械故障或燃料耗尽等原因产生的报废飞行器,加之在宇宙空间中的各种人造废弃物体,使得在绕地轨道上累积了越来越多的太空垃圾。它们有撞击其它航天器的风险,某些太空垃圾在返回大气层时也会对地面安全造成威胁。因此对其进行捕获收集具有重要意义。
2、现有的常见太空抓捕技术主要可分为针对合作目标和针对非合作目标两类。目前大多数的太空捕获技术主要是针对合作目标进行抓捕,需要目标物体安装有对接装置,因此面对众多的非合作目标无法进行有效捕获。而目前应用于非合作目标抓捕技术,存在单次抓取成本过高、通用性差、抓取能力弱等缺点。因此急需研究一种新的太空捕获技术来解决上述不足。
技术实现思路
1、本发明的目的在于提供一种多模式超冗余绳驱动捕获机械手、捕获系统及自适应捕获方法,能够解决上述问题,在理想的太空抓捕任务中,一方面,抓取机械手在运载过程中保持紧凑状态,节省运载空间;另一方面,其在抓取时可以根据物体外形做出最佳的捕获策略,根据目标物体的形状对目标物体的抓取具有自适应性。具体地,其将多个机械手指安装在可变形的基座上,通过基座的变形来改变各个机械手指的排布,以此来根据目标物体形状变形为最适合的捕获结构。同时各个机械手指采用将多个指节单元体用万向节等刚性关节串联,再依靠多根绳索配合驱动来实现各个机械手指的弯曲变形,进而在控制系统的控制下可以实现对目标物体的自适应抓取,以及实现在运载时保持蜷缩状态以节省运载空间。
2、为实现上述目的,本发明公开了如下技术方案:
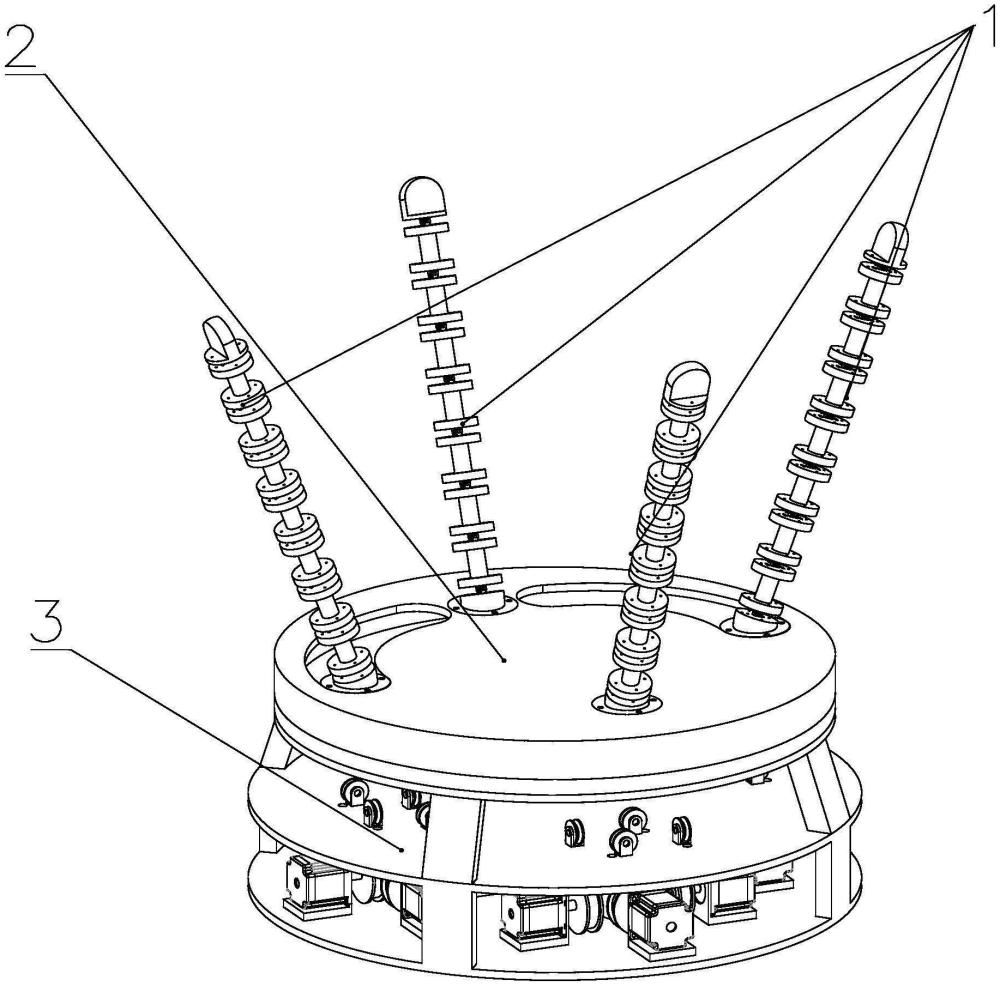
3、本发明提供一种多模式超冗余绳驱动捕获机械手,其包括多个机械手指、变形基座以及驱动模块;所述多个机械手指安装在基座上,所述驱动模块用于驱动手指运动以及基座变形;
4、所述变形基座包括基座外框、固定底座、旋转底座、手指基座以及顶板;所述固定底座与旋转底座均匀设置在所述基座外框的圆周上且固定底座与旋转底座间隔布置,所述固定底座与旋转底座上均设置有一个手指基座;所述基座外框上安装有一个基座滑轮,每一个所述旋转底座上分别安装有旋转底座滑轮与弹簧;所述旋转底座与基座外框采用转动副连接,所述旋转底座滑轮设置在所述旋转底座的中间位置,所述弹簧的第一端和第二端分别连接基座外框与旋转底座;所述顶板与所述基座外框配合连接;
5、所述机械手指分为第一组机械手指以及第二组机械手指,所述第一组机械手指的机械手指借助于手指基座安装在所述固定底座上,所述第二组机械手指的机械手指借助于手指基座安装在所述旋转底座上;所述机械手指包括指尖单元体、n个指节单元体以及多条绳索;所述绳索第一端固定在机械手指的指尖单元体上,所述绳索的第二端依次穿过每一个指节单元体的穿绳孔并经过基座外框上的基座滑轮以及旋转底座的旋转底座滑轮后固定在驱动模块的绞盘上;多条绳索用于控制机械手指的前后弯曲以及左右弯曲,指节单元体与指节单元体之间、指节单元体与手指基座之间均采用万向节连接;
6、当驱动模块驱动绳索收缩时,在绳索作用下两旋转底座旋转并靠近同一固定底座,同时旋转底座上的弹簧伸长,当驱动模块驱动绳索放松时,两旋转底座在弹簧作用下旋转并远离固定底座,当旋转底座运动时能够带动第二组机械手指运动从而使机械手指彼此之间相对位置产生改变。
7、优选地,所述驱动模块包括外框、电机、滑轮组以及绞盘,所述绞盘与电机转动轴通过连接器连接,用于收放超冗余机械手指及变形基座的绳索,所述电机、滑轮组以及绞盘均固定在所述外框上。
8、优选地,所述机械手指设置有四个,所述第一组机械手指以及第二组机械手指分别包括两个。
9、优选地,所述绳索上设置有力传感器,通过控制每一个机械手指上的各个绳索伸长量能够实现对手指弯曲方向的控制。
10、优选地,所述顶板上开设有两个对称设置的四分之一圆弧形滑槽,第二组机械手指的两个机械手指分别穿过两个圆弧形滑槽。
11、优选地,所述驱动模块的外框包括上框、中平台、下平台以及立柱;上框、中平台以及下平台之间借助于立柱进行固定连接,所述中平台以及下平台均为圆盘状结构,所述上框安装所述变形基座,所示中平台安装所述滑轮组,所述下平台安装所述电机以及绞盘。
12、优选地,所述固定底座和旋转底座分别设置有两个,所述旋转底座的第一端与所述变形基座转动连接,所述旋转底座的第二端安装手指基座。
13、优选地,所述手指基座的上表面设置有与机械手指配合的斜面,所述机械手指上设置有感应片。
14、本发明的另一方面,提供一种多模式超冗余绳驱动捕获机械手捕获系统,其包括多模式超冗余绳驱动捕获机械手及控制系统,所述多模式超冗余绳驱动捕获机械手上的感应片以及绳索上的力传感器与所述控制系统的输入端连接,所述控制系统的输出端连接多模式超冗余绳驱动捕获机械手的电机,所述控制系统接收感应片及力传感器输入的电信号,依据捕获目标计算后输出直流电信号控制机械手装置驱动模块的电机的运转,实现对目标物体的捕捉。
15、本发明的另一方面,提供一种多模式超冗余绳驱动捕获机械手自适应捕获方法,其包括以下步骤:
16、s1、抓取状态选择:当控制系统识别到目标物体进入到捕获机械手的工作空间后,根据目标物体的形状和大小判断捕获机械手所需采用的抓取状态,控制系统向驱动模块输出直流电信号,控制对应电机驱动变形底座切换为对应的抓取状态;
17、s2、自适应抓取:当控制系统识别到目标物体进入捕获机械手的工作空间且变形底座已切换为对应的抓取状态时,控制系统向驱动模块输出直流电信号,控制对应电机转动对绳索进行收放,通过多个电机的配合进而驱动机械手指向对应的方向弯曲进行捕获;
18、当所述机械手指与所需抓取的捕获目标产生接触时,机械手指上的感应片会产生形变并将电信号传输至控制系统,控制系统根据各个机械手指的感应片电信号判断是否完成可靠抓取,并根据判断结果向驱动模块输出直流电信号,控制对应的电机停止运转并自锁,结束捕获过程;
19、s3、释放过程:当需要释放目标时,控制系统向驱动模块输出直流电信号,控制对应电机转动对绳索进行收放,通过多个电机的配合进而驱动机械手指向对应的方向弯曲实现对目标物体的释放。
20、与现有技术相比,本发明的有益效果如下:
21、(1)本发明的多模式超冗余绳驱动捕获机械手通过设置多个机械手指,使得其在运载过程中可以保持弯曲状态,节省运载空间;在对目标物体进行抓捕时,可以通过绳索驱动对各个手指的弯曲进行控制,并且通过变形基座改变各个机械手指之间的相对位置,根据目标物体的形状进而实现对目标物体的自适应抓取。
22、(2)本发明的多模式超冗余绳驱动捕获机械手将手指安装在变形基座上,通过基座的变形来实现手指相对位置的改变,进而可以根据物体形状制定出更适合的捕获策略,以便于更好的抓取物体。
23、(3)本发明的多模式超冗余绳驱动捕获机械手的可拓展性高,能根据捕获目标尺寸范围对指节单元数量进行拓展,增大抓取面的包络面积,提高抓取可靠性;同时发明各个手指结构相同,手指间通用零件数量多,结构简单易于实现工程制造。
24、(4)本发明中采用将多个指节单元体用刚性铰链串联并用绳索驱动的绳驱超冗余结构,可以根据目标物体的形状实时控制各个机械手指独立的弯曲度,实现对目标物体的自适应抓取。同时,将所有驱动统一后置至驱动单元的设计可以大大提高有效载荷比。
25、(5)本发明的多模式超冗余绳驱动捕获机械手,在太空抓捕任务中,一方面,抓取机械手在运载过程中保持紧凑状态,节省运载空间。另一方面,其在抓取时可以根据物体外形做出最佳的捕获策略,根据目标物体的形状对目标物体的抓取具有自适应性,满足更多抓取需求。
本文地址:https://www.jishuxx.com/zhuanli/20240919/299470.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表