一种大型测绘无人机防干扰定向返航系统及方法与流程
- 国知局
- 2024-09-19 14:40:51
本发明涉及无人机防干扰及干扰中定向返航,尤其涉及一种大型测绘无人机防干扰定向返航系统及方法。
背景技术:
1、无人机及其搭载的摄像机、雷达等组成的无人机测绘装置是当前测绘领域一种主要生产手段。大型测绘无人机价格昂贵,其所携带的测绘用高清摄像机、激光雷达等设备构造精密且价格高昂,一套大型无人机测绘装置动辄数百万元,一旦执行任务过程中坠机或遗失,将造成重大损失及严重生产事故。
2、一般开展无人机测绘任务前,测绘单位会向军方、警方等管理单位申请空域使用权,并严格按照审批规定的时间、规定的范围进行飞行测绘任务。由于得到了空域审批,一般无人机作业期间及范围内不会受到定向干扰、攻击。
3、干扰无人机正常飞行的方式主要为干扰控制信号,或干扰gps等为代表的gnss定位信号,前者,使地面控制器与无人机失去无线连接,从而使地面控制器无法接收无人机数据和向无人机发送指令,后者,除了使gnss等卫星定位手段失锁卫星,引起定位失败外,也可以通过发射假的卫星信号,导致定位错误,进而影响无人机正常作业。
4、当前民用上,尚没有一种能够完全有效在存在gnss、控制信号干扰情况保护无人机及其测绘系统安全的装置或方法,由此造成了众多无人机坠毁,给作业单位及测绘行业带来重大经济损失及项目延期。
5、综上,业内急需一种在存在gnss、飞行控制等信号的干扰、压制、静默情况下,能够有效保证无人机飞行安全的设备或者方法。
技术实现思路
1、本发明提供一种大型测绘无人机防干扰定向返航方法及系统,以在存在gnss、飞行控制等信号的干扰、压制、静默情况下,能够有效保证无人机飞行安全。
2、一种大型测绘无人机防干扰定向返航系统,具体包括如下组成部分:
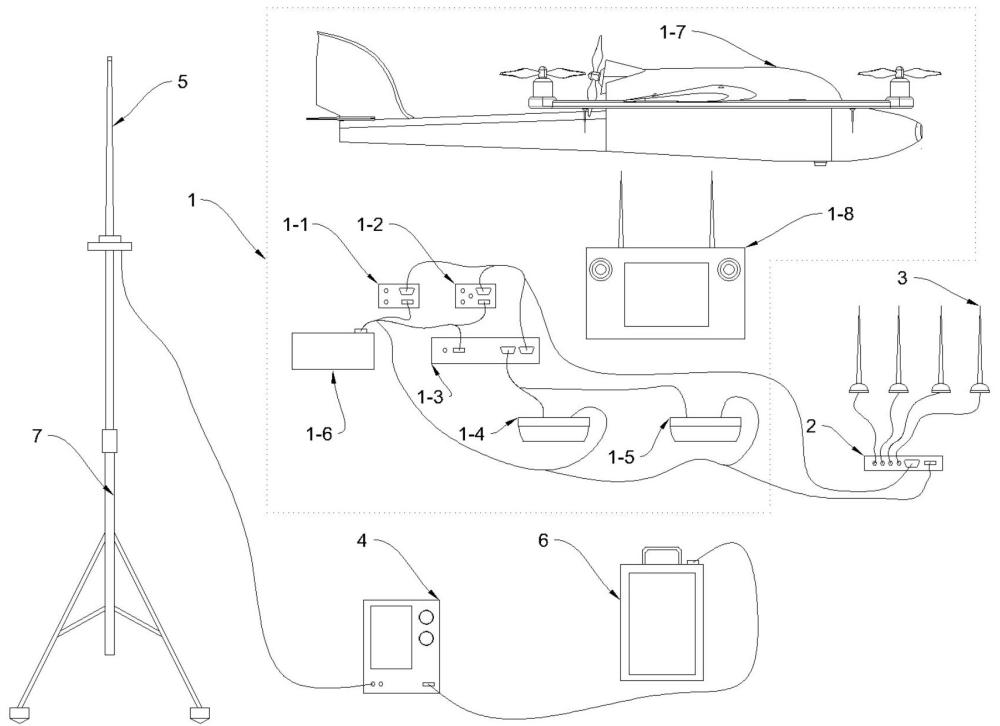
3、无人机系统、定向罗盘分析器、定向罗盘天线、地面信号发射器、信号发射器天线、电池组、天线支架;
4、其中,所述无人机系统采用gnss模块和惯导模块作为导航单元,飞行控制器作为控制核心,gnss模块、惯导模块采用串口连接飞行控制器;所述无人机系统底部设置有测距传感器一,用于飞行时测量地面距离,前部设置有测距传感器二,用于测量前方障碍物距离;测距传感器一、测距传感器二与飞行控制器采用串口连接。
5、进一步的,所述无人机系统还包括无人机外壳;
6、定向罗盘分析器安装在无人机外壳内部,采用串行接口连接所述飞行控制器,接收飞行控制器指令及向飞行控制器发送数据;
7、若干定向罗盘天线对称安装于无人机外壳外侧底部,并与定向罗盘分析器相连,用于接收信号发射器天线发射的信号。
8、进一步的,所述无人机系统还设置有动力电池组,用于为无人机系统供电;天线支架安放于地面空旷位置,信号发射器天线安装于天线支架顶部;地面站设置有远程控制终端;信号发射器天线为全向天线,与地面信号发射器相连,用于发射无线电全向信号;地面信号发射器与电池组连接。
9、一种大型测绘无人机防干扰定向返航方法,基于上述任一项所述的大型测绘无人机防干扰定向返航系统,包括如下步骤:
10、步骤1,无人机开展飞行任务前,通过扫频探测无人机起飞场地是否存在干扰源,若不存在干扰源,进入步骤2,否则结束飞行任务,重新选择起飞场地;
11、步骤2,确定地面信号发射器待调制信号频率,打开地面信号发射器电源,并完成信号调制;
12、步骤3,进行无人机定向地面测试,具体为:变换信号发射器天线与无人机系统相对位置,若远程控制终端显示的定向信号来源方向始终指向信号发射器天线方向,则测试通过,进入步骤4,否则,检查并校准定向罗盘分析器和定向罗盘天线;
13、步骤4,开始无人机飞行任务,飞行控制器实时监测与远程控制终端的控制通信连接状态及gnss信号状态;
14、步骤5,若无人机控制信号及导航信号正常,无人机继续执行原定任务,直至完成任务,正常返航;若不正常,若单独控制通信连接状态异常,进入步骤6,若单独gnss信号状态异常,进入步骤7,若控制通信连接状态及gnss信号状态异常均异常,进入步骤8;
15、步骤6,控制通信连接状态异常发生后,延迟t1时间,如果t1时间内,控制通信连接状态恢复正常,则返回步骤5,若仍然异常,且gnss信号状态正常,记录故障状态为g1,进入步骤9,若gnss信号状态异常,记录故障状态为g3,进入步骤9;
16、步骤7,gnss信号状态异常发生后,延迟t2时间,如果t2时间内,gnss信号状态恢复正常,则返回步骤5,若仍然异常,且控制通信连接状态正常,记录故障状态为g2,否则,记录故障状态为g3,进入步骤9;
17、步骤8,控制通信连接状态异常及gnss信号状态同时异常时,延迟t3时间,如果t3时间内,两个信号均恢复正常,则返回步骤5,若gnss信号状态恢复正常,而控制通信连接状态异常,记录故障状态为g1,进入步骤9,若gnss信号状态异常,而控制通信连接状态正常,记录故障状态g2,进入步骤9,若控制通信连接状态异常及gnss信号状态均存在异常,记录故障状态g3,进入步骤9;
18、步骤9,启动无人机定向返航功能;
19、步骤10,无人机返航成功,结束飞行任务。
20、进一步的,所述步骤1中,通过扫频探测无人机起飞场地是否存在干扰源,具体为:
21、步骤1-1,启动无人机电源,由定向罗盘分析器扫描定向罗盘天线接收到的无人机起飞场地附近无线电信号,并在远程控制终端显示扫描结果;
22、步骤1-2,扫描2.4g频段附近遥控信号强度,若远程控制终端能够接收到无人机信号,且信号强度达到满值信号强度的70%以上,执行步骤1-3,否则结束飞行任务,重新选择起飞场地;
23、步骤1-3,扫描1.5g频段附近gnss信号强度,若能够达到定位最小收星数量,执行步骤1-4,否则,结束飞行任务,重新选择起飞场地;
24、步骤1-4,若无人机带有图传功能,且图传功能为本次无人机作业主要功能,扫描5.8g频段附近图传信号强度,且信号强度达到满值信号强度的70%以上,执行步骤1-5,否则,结束飞行任务,重新选择起飞场地;
25、步骤1-5,扫描甚高频和特高频除1.5、2.4g频段的频段信号,选择当地规定允许使用的且信号强度最低的频段作为定向信号频段,若没有满足要求的频段,则停止飞行任务,依次选择信号强度由低到高的至少3个频段,并向当地主管部门申请使用其中任一频段作为定向信号频段;所述甚高频为30-300mhz频段,特高频为300-3000mhz频段;
26、步骤1-6,扫频探测任务结束。
27、进一步的,所述步骤1-3中定位最小收星数量为4颗卫星。
28、进一步的,所述步骤2中,地面信号发射器待调制信号频率为步骤1-5中选择的定向信号频段,将地面信号发射器信号调制到所述定向信号频段,信号发射器天线将发出位于定向信号频段的全向定向信号。
29、进一步的,状态g1代表控制通信连接状态异常,gnss信号状态正常;状态g2代表控制通信连接状态正常,gnss信号状态异常;状态g3代表控制通信连接状态异常,gnss信号状态异常。
30、进一步的,所述步骤9中,无人机定向返航的方法为:
31、步骤9-1,判断故障状态,如果故障状态为g1,且无人机为固定翼无人机,进入步骤9-5;
32、步骤9-2,判断故障状态,如果故障状态为g2,且无人机为固定翼无人机,进入步骤9-6;
33、步骤9-3,判断故障状态,如果故障状态为g3,且无人机为固定翼无人机,进入步骤9-6;
34、步骤9-4,如果无人机为旋翼无人机,且故障状态为g2,则由地面人员操控远程控制终端手动控制无人机返航或者执行步骤9-6;
35、步骤9-5,无人机系统采用gnss模块导航数据自动返航,在返航过程中,实时监测gnss信号状态,若gnss信号状态正常,保持返航动作,直至返航成功,若不正常,进入步骤9-6;
36、步骤9-6,无人机系统采用定向罗盘分析器、定向罗盘天线确定返航目的地方向,返航目的地方向为信号发射器天线方向,采用惯导模块数据做无人机方向、姿态、航速和高度的控制依据,采用测距传感器一测量飞机到地面距离,用于辅助航行高度判断,采用测距传感器二判断无人机航向前方障碍物,用于辅助主动避障,控制无人机系统向着返航目的地方向飞行,实时监测gnss信号状态,返航过程中,若gnss信号状态恢复正常,进入步骤9-5。
37、进一步的,所述gnss信号状态异常包括gnss定位失败、gnss定位数据突变,其中,gnss定位数据突变导致gnss信号状态异常后,当发生第二次数据突变后,且无人机返航接近信号发射器天线1km范围内,认为gnss信号状态恢复正常,进入步骤9-5。
38、与现有技术相比较,本发明的有益效果在于:
39、其一,本发明在无人机受到控制信号或gnss定位信号干扰时,能够在不依靠gnss定位导航数据的情况下,向信号发射器天线安装位置返航,使无人机脱离坠机和迷失危险,避免造成坠机及安全生产事故;
40、其二,本发明通过实时监测无人机的控制通信连接状态和gnss信号状态,系统能够准确判断无人机当前的飞行环境和可能遇到的问题。这种双重判断机制提高了无人机对环境变化的适应能力和应对突发情况的能力;
41、其三,本发明在控制通信连接状态或gnss信号状态异常时,系统引入了延迟时间(t1、t2、t3),用于进一步确认信号状态是否能够恢复正常。这种延迟机制可以避免因暂时的信号波动而过早地触发返航程序,从而提高任务的成功率;
42、其四,系统根据不同的故障状态(g1、g2、g3)采取不同的返航策略,当控制通信连接状态异常而gnss信号正常时(状态g1),无人机可以利用gnss数据自动返航;而当两种信号都异常时(状态g3),无人机则依赖定向罗盘和惯导模块进行返航,使得无人机能够在各种情况下安全返回,提高了系统的可靠性和安全性。
本文地址:https://www.jishuxx.com/zhuanli/20240919/299578.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表