一种可调式机械手结构的制作方法
- 国知局
- 2024-09-19 14:41:52
本发明涉及机械手设备,特别是指一种可调式机械手结构。
背景技术:
1、注塑机械手是为注塑生产自动化专门配备的机械,它可以在减轻繁重的体力劳动、改善劳动条件和安全生产,能够模仿人体上肢的部分功能。提高注塑成型机的生产效率、稳定产品质量、降低废品率、降低生产成本、增强企业的竞争力等方面起到极其重要的作用。机械手用于注塑设备中取料的关键设备,可以替代人工从事危险环境,现有专利公告号为cn111633631b的专利公布了一种用于注塑的机械手,该设备虽然可以完成对注塑件的抓取,但是该机械手在抓取的过程中,抓取臂只能横向移动和旋转运动,必须到达设定位置才控制抓取臂完成朝向模具内腔进给动作,这样就使得进给动作与横移动作分离,不利于提高机械手抓取的效率,同时该机械手在进行工作的时候无法获取成型内腔的墙壁情况,需要工作人员走到相应位置进行观察,安全性不佳。
2、基于此,现在提供一种可调式机械手结构,可以消除现有装置存在的弊端。
技术实现思路
1、本发明的目的在于提供一种可调式机械手结构,解决了现有技术中抓取效率不佳的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种可调式机械手结构,包括一个竖直设置的抓取基柱,所述抓取基柱下端与支撑部件连接,所述抓取基柱上端两侧设有至少两个横移导向套,所述横移导向套中滑动设有水平滑杆,所述水平滑杆一端设有一个竖直牵引套,所述竖直牵引套连接用于带动水平滑杆在横移导向套中往复滑动的往复牵引部件,所述水平滑杆另一端设有用于抓取注塑模腔中成型件的抓取部件,所述抓取部件上还设有用于获取注塑件影像信息的摄像头。
4、在上述技术方案的基础上,本发明还提供以下可选技术方案:
5、在一种可选方案中:所述抓取部件包括一个抓取梁板,抓取梁板中间位置设有与摄像头安装的安装槽,所述抓取梁板上开设有至少一个夹持滑槽,每个夹持滑槽中滑动设有两个夹持滑块,翻转臂板穿过夹持滑槽与限位滑块连接,所述限位滑块外侧与抓取连杆连接,所述抓取连杆端部设有抓取注塑件的抓取夹,两个夹持滑块连接用于带动二者相对运动的夹持驱动件,所述抓取梁板一侧设有一个抓取滑座,所述抓取滑座下端设有两个导向套座,所述导向套座与水平滑杆滑动设置,水平滑杆端部与导向套座之间通过避让弹簧连接,所述抓取滑座上设有用于带动抓取梁板翻转的翻转驱动件,所述抓取滑座上端设有用于带动抓取梁板朝向注塑件成型位置移动的进给驱动件。
6、在一种可选方案中:所述抓取梁板上设有对摄像头表面进行清理的清理单元,通过清理单元保证了摄像的质量,所述清理单元包括滑动设置在抓取梁板表面的清理滑块,所述清理滑块上设有对摄像头表面进行擦拭的海绵条,所述摄像头表面设有朝向摄像头吹气的喷气孔,所述清理滑块下端通过横移连杆与一个限位滑块连接,所述清理滑块上端进气口位置与活塞充气连杆连通,所述活塞充气连杆另一端设有活塞块,活塞块与充气活塞筒内腔滑动设置,所述活塞块上设有将充气活塞筒和清理滑块连通的连通口,活塞充气连杆中设有单向排气阀,所述充气活塞筒上设有单向进气阀。
7、在一种可选方案中:所述进给驱动件包括滑动设置在抓取滑座上端的进给滑座,所述进给滑座端部设有便于翻转驱动件安装的安装区域,所述抓取滑座上方水平设有两个进给导杆,所述进给导杆与进给滑座上的水平孔滑动设置,所述进给导杆两端通过基块与抓取滑座连接,所述进给导杆一端与进给滑座之间通过进给复位弹簧连接,所述抓取滑座上端还设有用于推动进给滑座朝向侧面滑动的侧推单元。
8、在一种可选方案中:所述侧推单元包括设置在进给滑座上端中间位置的进给引导销,所述抓取滑座上方水平设有一个进给引导横杆,所述进给引导横杆末端设有引导进给引导销朝向侧面移动的末端斜板。
9、在一种可选方案中:侧推单元包括设置在进给滑座上端的进给引导销,所述进给引导销上端通过复位卷簧转动设有一个卷绕辊,所述卷绕辊上缠绕有牵引绳,所述牵引绳绕过抓取滑座上的中间销杆与抓取基柱连接固定,中间销杆靠近抓取梁板设置。
10、在一种可选方案中:所述翻转驱动件包括设置在抓取梁板中间位置的翻转u型架,所述翻转u型架侧面设有两个翻转臂板,所述翻转臂板之间固定设有一个翻转轴,所述翻转轴端部与翻转涡轮固定连接,所述翻转涡轮上侧与翻转蜗杆相互啮合,所述翻转蜗杆连接用于带动其转动的翻转电机。
11、在一种可选方案中:所述夹持驱动件包括设置在夹持滑块上的夹持螺孔,夹持螺孔中配合设有一个夹持螺杆,夹持螺杆上设有与夹持滑块相匹配的夹持螺纹段,每对夹持螺纹段螺纹旋向相反,所述夹持螺杆一端与抓取梁板端部的固定块转动连接,所述夹持螺杆连接用于带动其转动的夹持电机。
12、在一种可选方案中:所述往复牵引部件包括一个牵引横座,两个牵引横座末端分别转动设有一个第一带轮和一个第二带轮,所述第一带轮和第二带轮之间通过牵引皮带传动连接,所述牵引皮带侧面固定设有一个牵引侧块,所述牵引侧块侧面转动设有一个竖直牵引杆,所述竖直牵引杆上端与竖直牵引套滑动配合,所述第一带轮的轴端连接用于带动其转动的牵引电机,所述牵引横座上设有用于调整牵引行程的行程调节件。
13、在一种可选方案中:所述行程调节件包括开设在牵引横座上的滑动缺口,所述滑动缺口上滑动设有一个张紧滑块,所述张紧滑块与第二带轮轴端转动连接,所述张紧滑块侧面与张紧滑杆一端连接,所述张紧滑杆滑动穿过牵引横座表面的张紧滑套,所述张紧滑块与张紧滑套之间通过张紧弹簧连接,所述牵引皮带下侧张紧配合有一个张紧轮,所述张紧轮端部与张紧臂板转动连接,所述张紧臂板下端与竖直滑动套滑动连接,所述张紧轮下端的螺纹孔中配合设有一个微调螺杆,所述微调螺杆下端连接用于带动其转动的微调电机,所述微调电机底部与第一固定侧板连接,所述竖直滑动套与第二固定侧板连接,所述第二固定侧板、第一固定侧板和牵引横座与抓取基柱侧面连接。
14、在一种可选方案中:所述支撑部件包括设置在抓取基柱下端的底部滑块,所述底部滑块滑动设置在水平底座上端的滑槽中,所述水平底座上的滑槽中设有与底部滑块相匹配的水平螺杆,所述水平螺杆一端与滑槽内壁转动连接,所述水平螺杆另一端连接用于带动其转动的底部电机。
15、相较于现有技术,本发明的有益效果如下:
16、1、本发明针对现有需要进行设计,可以针对需要带动抓取位置旋转,调整抓取角度,同时还可以利用抓取梁板滑动产生的动作配合侧推单元实现抓取夹进而,实现弯曲路径的抓取进而,无需将路径分开控制,有效的提高了抓取效率。
17、2、本发明在调节抓取角度的时候采样蜗轮蜗杆相匹配,具有自锁定位功能,保证了抓取的稳定性,同时本申请还可以实时获取抓取影像信息,方便操作人员对注塑位置工况进行把控,保证了设备平稳运行,也保证了操作的安全性。
18、3、本发明还可以利用夹持动力带动清理单元工作,从而对摄像头进行预先吹气,然后对摄像头进行擦拭,保证了摄像的质量。
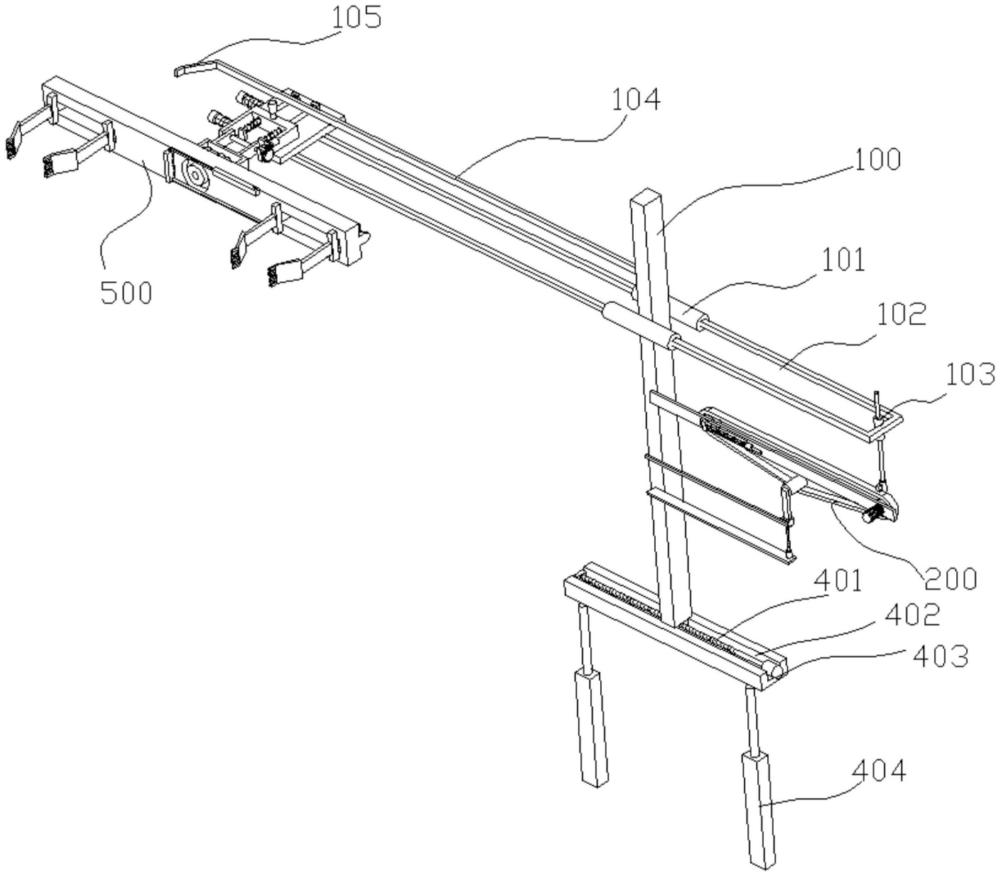
技术特征:1.一种可调式机械手结构,包括一个竖直设置的抓取基柱(100),所述抓取基柱(100)下端与支撑部件连接,其特征在于:所述抓取基柱(100)上端两侧设有至少两个横移导向套(101),所述横移导向套(101)中滑动设有水平滑杆(102),所述水平滑杆(102)一端设有一个竖直牵引套(103),所述竖直牵引套(103)连接用于带动水平滑杆(102)在横移导向套(101)中往复滑动的往复牵引部件(200),所述水平滑杆(102)另一端设有用于抓取注塑模腔中成型件的抓取部件(500),所述抓取部件(500)上还设有用于获取注塑件影像信息的摄像头(522)。
2.根据权利要求1所述的可调式机械手结构,其特征在于,所述抓取部件(500)包括一个抓取梁板(501),抓取梁板(501)中间位置设有与摄像头(522)安装的安装槽,所述抓取梁板(501)上开设有至少一个夹持滑槽(503),每个夹持滑槽(503)中滑动设有两个夹持滑块(502),翻转臂板(505)穿过夹持滑槽(503)与限位滑块(524)连接,所述限位滑块(524)外侧与抓取连杆(518)连接,所述抓取连杆(518)端部设有抓取注塑件的抓取夹(517),两个夹持滑块(502)连接用于带动二者相对运动的夹持驱动件,所述抓取梁板(501)一侧设有一个抓取滑座(511),所述抓取滑座(511)下端设有两个导向套座(526),所述导向套座(526)与水平滑杆(102)滑动设置,水平滑杆(102)端部与导向套座(526)之间通过避让弹簧(527)连接,所述抓取滑座(511)上设有用于带动抓取梁板(501)翻转的翻转驱动件,所述抓取滑座(511)上端设有用于带动抓取梁板(501)朝向注塑件成型位置移动的进给驱动件。
3.根据权利要求2所述的可调式机械手结构,其特征在于,所述抓取梁板(501)上设有对摄像头(522)表面进行清理的清理单元,通过清理单元保证了摄像的质量,所述清理单元包括滑动设置在抓取梁板(501)表面的清理滑块(520),所述清理滑块(520)上设有对摄像头(522)表面进行擦拭的海绵条,所述摄像头(522)表面设有朝向摄像头(522)吹气的喷气孔(521),所述清理滑块(520)下端通过横移连杆(523)与一个限位滑块(524)连接,所述清理滑块(520)上端进气口位置与活塞充气连杆(519)连通,所述活塞充气连杆(519)另一端设有活塞块,活塞块与充气活塞筒(525)内腔滑动设置,所述活塞块上设有将充气活塞筒(525)和清理滑块(520)连通的连通口,活塞充气连杆(519)中设有单向排气阀,所述充气活塞筒(525)上设有单向进气阀。
4.根据权利要求2所述的可调式机械手结构,其特征在于,所述进给驱动件包括滑动设置在抓取滑座(511)上端的进给滑座(508),所述进给滑座(508)端部设有便于翻转驱动件安装的安装区域,所述抓取滑座(511)上方水平设有两个进给导杆(509),所述进给导杆(509)与进给滑座(508)上的水平孔滑动设置,所述进给导杆(509)两端通过基块与抓取滑座(511)连接,所述进给导杆(509)一端与进给滑座(508)之间通过进给复位弹簧(507)连接,所述抓取滑座(511)上端还设有用于推动进给滑座(508)朝向侧面滑动的侧推单元。
5.根据权利要求4所述的可调式机械手结构,其特征在于,所述侧推单元包括设置在进给滑座(508)上端中间位置的进给引导销(510),所述抓取滑座(511)上方水平设有一个进给引导横杆(104),所述进给引导横杆(104)末端设有引导进给引导销(510)朝向侧面移动的末端斜板(105)。
6.根据权利要求4所述的可调式机械手结构,其特征在于,侧推单元包括设置在进给滑座(508)上端的进给引导销(510),所述进给引导销(510)上端通过复位卷簧转动设有一个卷绕辊(529),所述卷绕辊(529)上缠绕有牵引绳(530),所述牵引绳(530)绕过抓取滑座(511)上的中间销杆(528)与抓取基柱(100)连接固定,中间销杆(528)靠近抓取梁板(501)设置。
7.根据权利要求2所述的可调式机械手结构,其特征在于,所述翻转驱动件包括设置在抓取梁板(501)中间位置的翻转u型架(515),所述翻转u型架(515)侧面设有两个翻转臂板(505),所述翻转臂板(505)之间固定设有一个翻转轴(506),所述翻转轴(506)端部与翻转涡轮(514)固定连接,所述翻转涡轮(514)上侧与翻转蜗杆(513)相互啮合,所述翻转蜗杆(513)连接用于带动其转动的翻转电机(512)。
8.根据权利要求2所述的可调式机械手结构,其特征在于,所述夹持驱动件包括设置在夹持滑块(502)上的夹持螺孔,夹持螺孔中配合设有一个夹持螺杆(504),夹持螺杆(504)上设有与夹持滑块(502)相匹配的夹持螺纹段,每对夹持螺纹段螺纹旋向相反,所述夹持螺杆(504)一端与抓取梁板(501)端部的固定块转动连接,所述夹持螺杆(504)连接用于带动其转动的夹持电机(516)。
9.根据权利要求1所述的可调式机械手结构,其特征在于,所述往复牵引部件(200)包括一个牵引横座(206),两个牵引横座(206)末端分别转动设有一个第一带轮(208)和一个第二带轮(216),所述第一带轮(208)和第二带轮(216)之间通过牵引皮带(211)传动连接,所述牵引皮带(211)侧面固定设有一个牵引侧块(209),所述牵引侧块(209)侧面转动设有一个竖直牵引杆(210),所述竖直牵引杆(210)上端与竖直牵引套(103)滑动配合,所述第一带轮(208)的轴端连接用于带动其转动的牵引电机(207),所述牵引横座(206)上设有用于调整牵引行程的行程调节件。
10.根据权利要求9所述的可调式机械手结构,其特征在于,所述行程调节件包括开设在牵引横座(206)上的滑动缺口(217),所述滑动缺口(217)上滑动设有一个张紧滑块(215),所述张紧滑块(215)与第二带轮(216)轴端转动连接,所述张紧滑块(215)侧面与张紧滑杆(212)一端连接,所述张紧滑杆(212)滑动穿过牵引横座(206)表面的张紧滑套(213),所述张紧滑块(215)与张紧滑套(213)之间通过张紧弹簧(214)连接,所述牵引皮带(211)下侧张紧配合有一个张紧轮(205),所述张紧轮(205)端部与张紧臂板(204)转动连接,所述张紧臂板(204)下端与竖直滑动套(219)滑动连接,所述张紧轮(205)下端的螺纹孔中配合设有一个微调螺杆(203),所述微调螺杆(203)下端连接用于带动其转动的微调电机(202),所述微调电机(202)底部与第一固定侧板(201)连接,所述竖直滑动套(219)与第二固定侧板(218)连接,所述第二固定侧板(218)、第一固定侧板(201)和牵引横座(206)与抓取基柱(100)侧面连接。
技术总结本发明涉及机械手设备技术领域,具体公开了一种可调式机械手结构,用以解决了现有技术中抓取效率不佳的问题;该机械手结构包括一个竖直设置的抓取基柱,所述抓取基柱下端与支撑部件连接,所述抓取基柱上端两侧设有至少两个横移导向套,所述横移导向套中滑动设有水平滑杆,所述水平滑杆一端设有一个竖直牵引套,所述竖直牵引套连接用于带动水平滑杆在横移导向套中往复滑动的往复牵引部件,本发明针对现有需要进行设计,可以针对需要带动抓取位置旋转,调整抓取角度,同时还可以利用抓取梁板滑动产生的动作配合侧推单元实现抓取夹进而,实现弯曲路径的抓取进而,无需将路径分开控制,有效的提高了抓取效率。技术研发人员:刘嘉良,黄晓龙,余锦彪受保护的技术使用者:江门市裕威倡电器实业有限公司技术研发日:技术公布日:2024/9/17本文地址:https://www.jishuxx.com/zhuanli/20240919/299686.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种保险丝刀具的制作方法
下一篇
返回列表