一种机器人抓取物品的方法和系统与流程
- 国知局
- 2024-09-19 14:40:16
本发明涉及机器人移动路径规划,具体而言,涉及一种机器人抓取物品的方法和系统。
背景技术:
1、抓取机器人在现代社会中具有重要意义,对于一些机械重复的抓取性任务,抓取机器人的精确性和持久性远胜人类,这在提高生产效率的同时减少了生产成本和错误率。尤其对于大规模生产和高频次操作的场景中,抓取机器人的优势更加著。然而对于一些复杂多变的场景,传统抓取机器人就显得灵活性不足,需要人为干预才能完成抓取任务。
2、在专利cn115922769a中公开了一种智能抓取机器人,包括:机械手和移动底盘;机械手包括腰座、机械连杆机构和夹持机构;腰座包括壳体和设置在壳体内的腰回转轴,壳体的底面固定连接在移动底盘顶面;腰回转轴的顶端伸出至壳体顶部外侧,且腰回转轴可相对于自身轴线方向转动;机械连杆机构一端连接腰回转轴,另一端连接夹持机构;移动底盘内部设置有移动控制系统和抓取控制系统,移动控制系统用以控制移动底盘实现避障移动;抓取控制系统用以控制机械手移动。该专利声称的该机器人可进行导航、避障、测距、跟随和抓取运输等工作。
3、但是,该专利并没有公开有效避障的技术方案。在需要避开障碍抓取物体的应用场景下,传统的抓取机器人无法有效的规划路线并避开障碍。
技术实现思路
1、本发明提供了一种机器人抓取物品的方法和系统,以解决现有技术中机器人在抓取物品的过程中避障功能弱的问题。
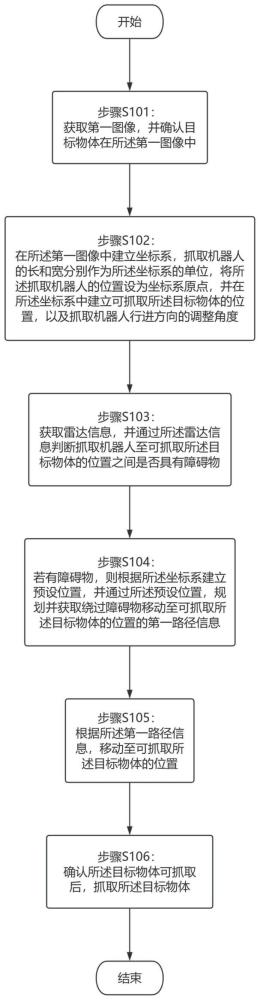
2、根据本申请实施例的一个方面,提供了一种机器人抓取物品的方法,方法包括:获取第一图像,并确认目标物体在第一图像中;在所述第一图像中建立坐标系,抓取机器人的长和宽分别作为所述坐标系的单位,将所述抓取机器人的位置设为坐标系原点,并在所述坐标系中建立可抓取所述目标物体的位置,以及抓取机器人行进方向的调整角度;获取雷达信息,并通过雷达信息判断抓取机器人至可抓取目标物体的位置之间是否具有障碍物;若有障碍物,则根据坐标系建立预设位置,并通过预设位置,规划并获取绕过障碍物移动至可抓取目标物体的位置的第一路径信息;根据第一路径信息,移动至可抓取目标物体的位置;确认目标物体可抓取后,抓取目标物体。
3、作为更进一步的实施方式,获取第一图像之后,还包括:若未确认目标物体在第一图像中,则在预设区域内移动并通过图像采集设备获取其他第一图像。
4、作为更进一步的实施方式,获取雷达信息,通过所述雷达信息判断抓取机器人至可抓取所述目标物体的位置之间是否具有障碍物之后,还包括:
5、根据原点和可抓取所述目标物体的位置,获取直线路径信息。。
6、作为更进一步的实施方式,规划并获取绕过障碍物移动至可抓取所述目标物体的位置的第一路径信息,包括:
7、通过所述坐标系和在所述坐标系中建立的预设位置计算原点至所述预设位置的路径数据;
8、通过所述预设位置和目标物体的位置坐标计算所述预设位置至所述目标物体的位置坐标的路径数据;
9、根据原点至所述预设位置的路径数据和所述预设位置至所述目标物体的位置坐标的路径数据,获取第一路径信息。
10、作为更进一步的实施方式,根据第一路径信息,移动至可抓取目标物体的位置,包括:
11、根据第一路径信息生成运动信息,通过运动信息移动至目标物体处。
12、作为更进一步的实施方式,根据第一路径信息生成运动信息,包括:
13、
14、其中,和为驱动轮各自的转速矢量,kx和ky分别代表水平和垂直方向上的系数,kxlsinθ和kylcosθ分别表示所述抓取机器人移动速度的水平和垂直分量,a为所述抓取机器人底盘几何中心到驱动轮的横向距离,b为所述底盘几何中心到驱动轮的纵向距离,w为角速度,w(a+b)表示速度偏差值,坐标系原点(0,0)为所述抓取机器人的位置,坐标(x,y)为可抓取所述目标物体的位置,θ为抓取机器人行进方向的调整角度。。
15、作为更进一步的实施方式,确认目标物体可抓取,包括:
16、根据目标物体获取第二图像,在第二图像中建立第一区域,第一区域为预设可抓取目标物体的区域;在第二图像中根据目标物体的轮廓建立第二区域;判断第一区域和第二区域是否重合,若重合则确认目标物体可抓取。
17、作为更进一步的实施方式,判断第一区域和第二区域是否重合,可以是:
18、
19、0≤iou≤1
20、其中,iou为重叠度,a为第一区域,b为第二区域;
21、若iou大于第一阈值,则判断第一区域和第二区域重合。
22、作为更进一步的实施方式,根据直线路径信息或第一路径信息,移动至可抓取目标物体的位置之后,还包括:确认目标物体不可抓取,则将第二图像作为第一图像。
23、作为更进一步的实施方式,抓取目标物体,包括:通过测距传感器实时获取抓取信息,并根据抓取信息调整机械抓抓取目标物体。
24、根据本申请实施例的另一个方面,提供了一种机器人抓取物品的系统,包括:定位模块,获取第一图像,并确认目标物体在第一图像中;雷达模块,扫描障碍物产生雷达信息;运动控制模块,在所述第一图像中建立坐标系,抓取机器人的长和宽分别作为所述坐标系的单位,将所述抓取机器人的位置设为坐标系原点,并在所述坐标系中建立可抓取所述目标物体的位置,以及抓取机器人行进方向的调整角度;获取雷达信息,并通过雷达信息判断抓取机器人至可抓取目标物体的位置之间是否具有障碍物;若无障碍物,则根据坐标系和可抓取目标物体的位置,规划并获取移动至可抓取目标物体的位置的直线路径信息;若有障碍物,则根据坐标系建立预设位置,并通过预设位置,规划并获取绕过障碍物移动至可抓取目标物体的位置的第一路径信息;根据直线路径信息或第一路径信息,移动至可抓取目标物体的位置;确认目标物体可抓取后,抓取目标物体。
25、根据本发明的又一个实施例,还提供了一种存储介质,存储介质中存储有计算机程序,其中,计算机程序被设置为运行时执行上述任一项方法实施例中的步骤。
26、根据本发明的又一个实施例,还提供了一种电子装置,包括存储器和处理器,存储器中存储有计算机程序,处理器被设置为运行计算机程序以执行上述任一项方法实施例中的步骤。
27、与现有技术相比,此方案通过自行规划避障的方法规划路线,抓取目标物体,解决了现有技术中抓取机器人在复杂地形下需要人工干预才可以抓取目标物体的问题。
技术特征:1.一种机器人抓取物品的方法,其特征在于,所述方法包括:
2.根据权利要求1所述方法,其特征在于,获取第一图像之后,还包括:
3.根据权利要求1所述方法,其特征在于,获取雷达信息,通过所述雷达信息判断抓取机器人至可抓取所述目标物体的位置之间是否具有障碍物之后,还包括:
4.根据权利要求1所述方法,其特征在于,规划并获取绕过障碍物移动至可抓取所述目标物体的位置的第一路径信息,包括:
5.根据权利要求1所述方法,其特征在于,根据所述第一路径信息,移动至可抓取所述目标物体的位置,包括:
6.根据权利要求1所述方法,其特征在于,根据所述第一路径信息生成运动信息,包括:
7.根据权利要求1所述方法,其特征在于,确认所述目标物体可抓取,包括:
8.根据权利要求7所述方法,其特征在于,判断所述第一区域和所述第二区域是否重合,包括:
9.根据权利要求7所述方法,其特征在于,根据所述第一路径信息,移动至可抓取所述目标物体的位置之后,还包括:
10.一种机器人抓取物品的系统,其特征在于,包括:
11.一种存储介质,其特征在于,所述存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时执行权利要求1至9任一项中所述的方法。
12.一种电子装置,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行权利要求1至9任一项中所述的方法。
技术总结本发明公开了一种机器人抓取物品的方法,所述方法包括:确认目标物体在第一图像中并建立坐标系,抓取机器人的长和宽分别作为坐标系的单位,抓取机器人的位置设为坐标系原点,获取可抓取目标物体的位置设为坐标和抓取机器人调整角度;通过雷达设备判断抓取机器人至可抓取目标物体的位置之间是否具有障碍物;若无,则规划并获取直线路径信息;若有障碍物,则根据坐标系建立预设位置,规划并获取绕过障碍物的第一路径信息;根据路径信息移动至可抓取所述目标物体的位置;确认目标物体可抓取后,抓取目标物体。此方案通过自行规划避障的方法规划路线,抓取目标物体,解决了现有技术中抓取机器人在复杂地形下需要人工干预才可以抓取目标物体的问题。技术研发人员:张辉,吴正中,卜彤君,唐才荣,孔祥开,邓能文,王晓东受保护的技术使用者:北京城建智控科技股份有限公司技术研发日:技术公布日:2024/9/17本文地址:https://www.jishuxx.com/zhuanli/20240919/299523.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表