一种水冷壁检测机器人的制作方法
- 国知局
- 2024-09-23 14:31:45
本技术属于无损检测,特别涉及一种用于电厂锅炉水冷壁防磨防爆检查的一种水冷壁检测机器人。
背景技术:
1、锅炉作为火力发电厂三大主机之一的主设备,主要由水冷壁、过热器、再热器、省煤器、联箱、汽水连接管等设备组成,据不完全统计,锅炉受热面四管爆漏事件占机组非计划停运事件的50%左右,个别火电厂受热面爆漏事件甚至高达65%。从锅炉受热面四管泄漏的情况来看,造成非计划停运检修的次数往往多于汽机和发电机,其中承压部件(水冷壁、省煤器、过热器、再热器)泄漏事故(包括炉内炉外管)又占锅炉事故的70%左右,因此要想大幅度降低锅炉临修次数,必须对锅炉本体设备做好防磨防爆工作。
2、以往传统的锅炉水冷壁检修方法,首先需要在锅炉内部受限空间内大面积搭设脚手架,或利用吊篮,对水冷壁高风险区域进行人工抽检,其工作环境相当恶劣,检修期间,难度大、进度慢、成本高。且锅炉水冷壁检修属于受限空间高处作业检修,其风险程度相当高,一旦发生高空坠落将给当事人与企业造成严重后果。
3、目前锅炉受热面水冷壁管屏防磨防爆检查工序是每堵墙的检修平台上站3个人,其中1人打磨,1人测厚,1人记录,检测效率低,对于管排间距小、人员无法进入的管屏无法进行检查,受检数量受限。
4、另外,目前防磨防爆检查多使用超声测厚仪。使用超声测厚仪作业前必须事先在被测管壁上喷涂耦合剂,检测时,检测人员将探头置于喷涂了耦合剂的管壁上调整角度,保证与管壁接触良好,压力适当。检测数值的准确性和检测人员的经验和工作态度有很大的关系,而且检测效率较低。
5、因此,有必要为提高检测速度和检测精度,实现远程控制,替代人工检查等方面进行研究,开发一种能够在水冷壁上实现快速、稳定和安全的移动作业的用于电厂锅炉水冷壁防磨防爆检查的机器人。
技术实现思路
1、为了克服上述现有技术中存在的不足,本实用新型提供一种远程控制测厚、操作简便,检查速度较快,用于电厂锅炉水冷壁防磨防爆检查的一种水冷壁检测机器人。一种水冷壁检测机器人应用电磁超声测厚原理,无需声耦合剂,对表面要求不高,粗糙表面无需打磨出来,可实现非接触式测量,检查效率高。一种水冷壁检测机器人能够在电厂锅炉水冷壁上实现前进、后退、转弯的移动作业,同时,辅助摄像头可直观观察并存储视频记录,利于事后割管检修,可替代人工高空危险作业,降低了作业人员的安全隐患,也大幅度提高电厂锅炉水冷壁检查效率,并通过控制器远程控制机器人作业,实现电厂锅炉水冷壁防磨防爆检查智能化。
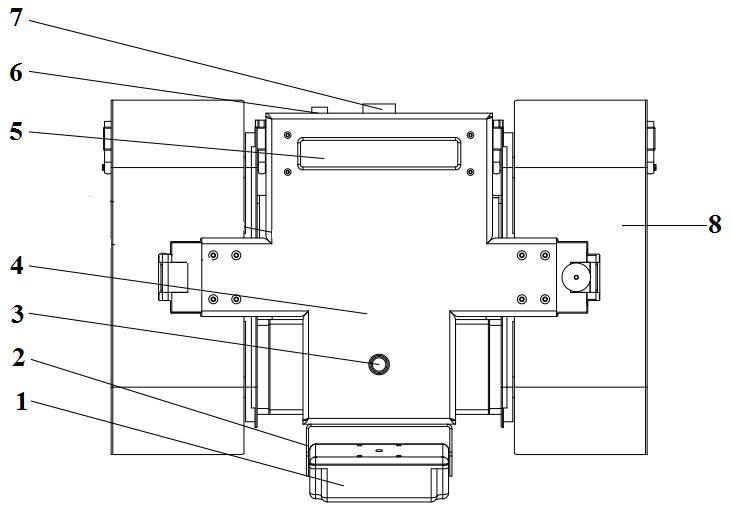
2、为解决上述技术问题,本实用新型所采用的技术方案是:一种水冷壁检测机器人,其特征在于包括摄像模块、测厚主机模块、行走模块、测厚探头模块。
3、其中,所述摄像模块包括摄像头外壳,摄像头外壳内置1个摄像头,摄像头周围设置4个用于辅助照明的led灯。
4、其中,所述摄像头外壳与摄像头支架活动连接,摄像头支架固定在测厚主机模块的外壳的前端。
5、其中,所述测厚主机模块包括外壳,外壳上端面设置用于显示测厚数值的显示屏,以及用于控制一种水冷壁检测机器人开关机的开关按键,外壳后端面设置用于给内置电池充电的充电接口,以及航插,外壳内置测厚主机,以及用于给一种水冷壁检测机器人供电的电池以,及控制电路。
6、其中,所述行走模块包括电机、主动轮、从动轮、轮支架、用于调节橡胶盖板链条松紧的链轮锁紧装置。
7、其中,所述主动轮与从动轮结构相同,都是在轮支架上安装轮毂,轮毂的轴上从左至右依次同轴安装铁轮、磁轮、铁轮、链轮,链轮上覆盖橡胶盖板链条。主动轮与电机连接,电机的输出轴与主动轮的轮毂的驱动轴连接,当电机驱动主动轮的轮毂转动,主动轮的轮毂带动同轴的铁轮、磁轮、链轮一起转动,即主动轮转动,主动轮的链轮转动,带动覆盖在主动轮的链轮上的橡胶盖板链条转动,橡胶盖板链条带动从动轮的链轮转动,从动轮的链轮带动从动轮转动,从而实现行走模块的运动。
8、其中,所述行走模块有两个,两个行走模块分别固定在测厚主机模块的外壳的左右两侧。
9、其中,所述测厚探头模块包括弹簧,弹簧位于探头外壳与测厚探头之间,滑轨与探头外壳的侧壁相连接,测厚探头的侧壁与滑轨滑动连接。
10、其中,所述测厚探头模块的探头外壳固定在测厚主机模块的外壳的底部。
11、其中,所述2个行走模块分别由各自的电机驱动,当一侧行走模块的电机正转,另一侧行走模块的电机反转,一种水冷壁检测机器人实现原地转弯。
12、其中,所述链轮锁紧装置安装在从动轮的外侧。
13、其中,所述测厚主机模块的测厚主机与一种水冷壁检测机器人的控制器可通过航插连接数据线连接,也可通过wifi连接。
14、其中,所述摄像头外壳在摄像头支架上可以手动向下搬动45度。
15、其中,所述弹簧最大压缩行程为10mm。
16、其中,所述行走模块通过铁磁吸力将机器人吸附在被测水冷壁管屏上作业,机器人在水冷壁垂直方向最大拉力30kg。
17、通过采用上述技术方案,本实用新型得到的有益效果是:
18、综上,本实用新型的一种水冷壁检测机器人能够在电厂锅炉水冷壁上实现前进、后退、转弯的移动作业,同时,通过在机器人上搭载测厚探头实现测厚检查。一种水冷壁检测机器人远程控制、操作简便,检查速度较快,同时,辅助摄像头可直观观察并存储视频记录,利于事后割管检修,可替代人工高空危险作业,降低了作业人员的安全隐患,也大幅度提高电厂锅炉水冷壁检查效率,并通过控制器远程控制机器人作业,实现电厂锅炉水冷壁防磨防爆检查智能化。
19、下面结合附图对本实用新型进行详细描述。
技术特征:1.一种水冷壁检测机器人,其特征在于包括摄像模块(1)、测厚主机模块(4)、行走模块(8)、测厚探头模块(9);
2.根据权利要求1所述的一种水冷壁检测机器人,其特征在于所述2个行走模块(8)分别由各自的电机驱动,当一侧行走模块(8)的电机正转,另一侧行走模块(8)的电机反转,一种水冷壁检测机器人实现原地转弯。
3.根据权利要求1所述的一种水冷壁检测机器人,其特征在于所述链轮锁紧装置(84)安装在从动轮的外侧。
4.根据权利要求1所述的一种水冷壁检测机器人,其特征在于所述测厚主机模块(4)的测厚主机与一种水冷壁检测机器人的控制器可通过航插(7)连接数据线连接,也可通过wifi连接。
5.根据权利要求1所述的一种水冷壁检测机器人,其特征在于所述摄像头外壳(11)在摄像头支架(2)上可以手动向下搬动45度。
6.根据权利要求1所述的一种水冷壁检测机器人,其特征在于所述弹簧(93)最大压缩行程为10mm。
7.根据权利要求1所述的一种水冷壁检测机器人,其特征在于所述行走模块(8)通过铁磁吸力将机器人吸附在被测水冷壁管屏上作业,机器人在水冷壁垂直方向最大拉力30kg。
技术总结本技术是一种水冷壁检测机器人。包括摄像模块、测厚主机模块、行走模块、测厚探头模块,摄像模块包括摄像头外壳,摄像头外壳内置1个摄像头,摄像头周围设置4个LED灯,测厚主机模块包括外壳,外壳上端面设置显示屏、开关按键,后端面设置充电接口、航插,内置测厚主机、控制电路,行走模块包括电机、主动轮、从动轮、轮支架、链轮锁紧装置,测厚探头模块包括弹簧,弹簧位于探头外壳与测厚探头之间,滑轨与探头外壳的侧壁相连接,测厚探头的侧壁与滑轨滑动连接。本技术机器人能够稳定、灵活行走,实现测厚、视频数据采集存储等功能,可远程控制,操作简便,检查速度较快,用于电厂锅炉水冷壁防磨防爆检查,替代人工,提高效率。技术研发人员:于学文,刘彬,李行健受保护的技术使用者:北京国电电科院检测科技有限公司技术研发日:20240201技术公布日:2024/9/19本文地址:https://www.jishuxx.com/zhuanli/20240923/303305.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表