一种船舶智能避碰方法及系统与流程
- 国知局
- 2024-10-09 16:02:19
本发明涉及船舶避碰,尤其是涉及一种船舶智能避碰方法及系统。
背景技术:
1、随着航运业的发展,船舶正朝着大型化、专业化、快速化方向发展,海上交通环境因此日趋复杂,船舶航行密度越来越大,航道与港口水域变得相对狭窄,使得船舶操纵问题越来越突出,船舶碰撞、搁浅触礁事故时有发生,对船舶航行安全带来了新的挑战,也促进船舶航行自动化技术发展的新需要。
2、船舶航行自动化发展历经了简单的航向控制、航迹控制到现在的综合船桥系统(integrated bridge system,简称ibs)。相对于早期独立的导航设备功能单一,现代化船舶装备优良,但是船舶碰撞、搁浅、触礁等海事事故还是频频发生,事故的原因调查中,有80%以上是由于人为因素造成的,这些海事事故除造成人员伤亡之外还对海洋生态环境造成巨大的影响。驾驶员在应对复杂会遇局面时,如果机器能自动给出既安全又科学的避让方案,那么将彻底缓解驾驶员在海上船舶间避碰的压力,即真正实现船舶避碰自动化。
3、综上分析,船舶的自动化程度受限,且在决策和操作上人的参与过多,驾驶员负担较重,无法实现船舶避碰的自动化,需要亟待解决的事故人为因素问题。因此,船舶避碰智能避碰技术的研究对船舶航行安全很有大的实际意义。
技术实现思路
1、为了解决上述提到的问题,本发明提供一种船舶智能避碰方法及系统。
2、第一方面,本发明提供的一种船舶智能避碰方法,采用如下的技术方案:
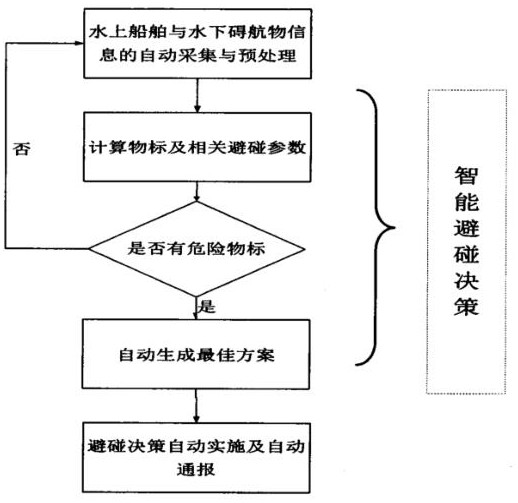
3、一种船舶智能避碰方法,包括:
4、获取水上船舶与水下碍航物信息,并进行信息预处理;
5、计算物标及相关避碰参数,并基于物标及相关避碰参数分别构建碰撞危险评价模型和避碰决策模型;
6、利用避碰决策模型获得避让方案并进行避让方案执行。
7、进一步地,所述获取水上船舶与水下碍航物信息,包括获取本船初始航向、航速及船舶基本操纵参数与目标船初始距离、方位、航向及航速。
8、进一步地,所述计算物标及相关避碰参数,包括调用目标参数求解算法获取目标运动要素及避碰参数,然后调用危险判定阈值量化算法获取安全会遇离sdamax及其最小值msda,再调用目标交会特征识别算法获悉目标交会特征。
9、进一步地,所述基于物标及相关避碰参数分别构建碰撞危险评价模型和避碰决策模型,包括对物标及相关避碰参数划分等级,依据划分的等级描述评价指标对碰撞危险度的影响。
10、进一步地,所述基于物标及相关避碰参数分别构建碰撞危险评价模型和避碰决策模型,还包括基于碰撞危险评价模型构建避碰决策模型,其中, 设定目标来船的目标集,同时设定针对目标来船下的避碰动作方案的避碰对策集,当所有目标来船中间只有一条来船与本船的碰撞危险度大于设定阈值,本船则进行避让行动。
11、进一步地,所述利用避碰决策模型获得避让方案并进行避让方案执行,包括通过判断避让方案执行时机是否到达,若时机到达则根据避让方案设置航向自动舵的避让航向与初始舵角以及接口参数,并进行执行避让方案后的碰撞危险检测与判断。
12、进一步地,所述进行执行避让方案后的碰撞危险检测与判断,包括调用目标认知算法判断执行避让方案后是否存在碰撞危险目标,如果存在危险目标船,表明该船采取不协调的避让行动,则进行二次避让;否则,则恢复原航向。
13、第二方面,一种船舶智能避碰系统,包括:
14、数据获取模块,被配置为,获取水上船舶与水下碍航物信息,并进行信息预处理;
15、计算模块,被配置为,计算物标及相关避碰参数,并基于物标及相关避碰参数分别构建碰撞危险评价模型和避碰决策模型;
16、避让模块,被配置为,利用避碰决策模型获得避让方案并进行避让方案执行。
17、第三方面,本发明提供一种计算机可读存储介质,其中存储有多条指令,所述指令适于由终端设备的处理器加载并执行所述的一种船舶智能避碰方法。
18、第四方面,本发明提供一种终端设备,包括处理器和计算机可读存储介质,处理器用于实现各指令;计算机可读存储介质用于存储多条指令,所述指令适于由处理器加载并执行所述的一种船舶智能避碰方法。
19、综上所述,本发明具有如下的有益技术效果:
20、本发明的智能避碰方案能够对于狭窄和开阔海域均具有避碰功能;同时能够接收本船导航数据、本船航线数据、海图障碍物数据和周边船只数据,并给出避碰航向建议;通过避碰航向建议,可以有效防止船只碰撞,极大地提高了船只航行过程中的安全性。
技术特征:1.一种船舶智能避碰方法,其特征在于,包括:
2.根据权利要求1所述的一种船舶智能避碰方法,其特征在于,所述获取水上船舶与水下碍航物信息,包括获取本船初始航向、航速及船舶基本操纵参数与目标船初始距离、方位、航向及航速。
3.根据权利要求2所述的一种船舶智能避碰方法,其特征在于,所述计算物标及相关避碰参数,包括调用目标参数求解算法获取目标运动要素及避碰参数,然后调用危险判定阈值量化算法获取安全会遇离sdamax及其最小值msda,再调用目标交会特征识别算法获悉目标交会特征。
4.根据权利要求3所述的一种船舶智能避碰方法,其特征在于,所述基于物标及相关避碰参数分别构建碰撞危险评价模型和避碰决策模型,包括对物标及相关避碰参数划分等级,依据划分的等级描述评价指标对碰撞危险度的影响。
5.根据权利要求4所述的一种船舶智能避碰方法,其特征在于,所述基于物标及相关避碰参数分别构建碰撞危险评价模型和避碰决策模型,还包括基于碰撞危险评价模型构建避碰决策模型,其中, 设定目标来船的目标集,同时设定针对目标来船下的避碰动作方案的避碰对策集,当所有目标来船中间只有一条来船与本船的碰撞危险度大于设定阈值,本船则进行避让行动。
6.根据权利要求5所述的一种船舶智能避碰方法,其特征在于,所述利用避碰决策模型获得避让方案并进行避让方案执行,包括通过判断避让方案执行时机是否到达,若时机到达则根据避让方案设置航向自动舵的避让航向与初始舵角以及接口参数,并进行执行避让方案后的碰撞危险检测与判断。
7.根据权利要求6所述的一种船舶智能避碰方法,其特征在于,所述进行执行避让方案后的碰撞危险检测与判断,包括调用目标认知算法判断执行避让方案后是否存在碰撞危险目标,如果存在危险目标船,表明该船采取不协调的避让行动,则进行二次避让;否则,则恢复原航向。
8.一种船舶智能避碰系统,其特征在于,包括:
9.一种计算机可读存储介质,其中存储有多条指令,其特征在于,所述指令适于由终端设备的处理器加载并执行如权利要求1所述的一种船舶智能避碰方法。
10.一种终端设备,包括处理器和计算机可读存储介质,处理器用于实现各指令;计算机可读存储介质用于存储多条指令,其特征在于,所述指令适于由处理器加载并执行如权利要求1所述的一种船舶智能避碰方法。
技术总结本发明涉及船舶避碰技术领域,尤其是涉及一种船舶智能避碰方法及系统。一种船舶智能避碰方法,包括获取水上船舶与水下碍航物信息,并进行信息预处理;计算物标及相关避碰参数,并基于物标及相关避碰参数分别构建碰撞危险评价模型和避碰决策模型;利用避碰决策模型获得避让方案并进行避让方案执行。本发明的智能避碰方案能够对于狭窄和开阔海域均具有避碰功能;同时能够接收本船导航数据、本船航线数据、海图障碍物数据和周边船只数据,并给出避碰航向建议;通过避碰航向建议,可以有效防止船只碰撞,极大地提高了船只航行过程中的安全性。技术研发人员:刘晓梅,丁若霖,吕明受保护的技术使用者:济南坤烁信息科技有限公司技术研发日:技术公布日:2024/9/26本文地址:https://www.jishuxx.com/zhuanli/20240929/311329.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表