一种脊柱外科手术用机械臂调控系统及方法
- 国知局
- 2024-10-09 14:42:09
本发明涉及机械臂,具体为一种脊柱外科手术用机械臂调控系统及方法。
背景技术:
1、脊柱外科手术是一种用于治疗脊柱相关疾病或损伤的重要手术方法,在脊柱外科手术中,一般使用机械臂用于辅助手术的进行,并通过机械臂调控系统控制机械臂各个关节的运行。
2、在现有技术中,公开号为cn116728420b的一种脊柱外科手术用机械臂调控方法及系统中,该发明涉及图像数据处理技术领域,具体涉及一种脊柱外科手术用机械臂调控方法及系统,包括:获取脊柱影像中的特征点,并获得不同扫描角度下对应脊柱影像中特征点之间的相似程度,利用相似程度对损失函数进行调节优化,结合优化后损失函数对所有扫描角度下的脊柱影像进行配准,获得脊柱三维模型,以对机械臂进行调控,该发明通过考虑脊柱影像中特征点与其他特征点的信息变化,结合不同扫描角度下特征点之间的关系,获取特征点配准过程中损失函数的调节系数,保证了配准迭代过程中,重要且相似程度较大的特征点的匹配精度更准确,进而提高了脊柱三维模型的准确性和机械臂姿态调控的精准度。
3、现有的机械臂调控系统存在以下问题:
4、一般机械臂调控系统采用影像采集模块、角点特征模块、算法优化模块和机械臂调控模块用于控制机械臂运行,在机械臂的运行过程中,对机械臂的各个电机和液压油缸的控制效率和精准度较低,不便于通过预设识别物体,将机械臂移动至预设位置,并提供精准识别数据。
5、综上所述的问题,为此,我们提出一种脊柱外科手术用机械臂调控系统及方法。
技术实现思路
1、本发明的目的在于提供一种脊柱外科手术用机械臂调控系统及方法,解决了现有的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种脊柱外科手术用机械臂调控系统,包括:
4、机械臂,以及用于控制机械臂的机械臂调控系统;
5、所述机械臂包括机械臂控制盒,所述机械臂控制盒内部的底部设置有活动底架,所述活动底架的顶部连接有若干个第一液压油缸,所述第一液压油缸的一端通过螺栓与机械臂控制盒固定连接,另一端通过螺栓与活动底架固定连接,所述活动底架的底部连接有若干个万向轮;
6、所述机械臂控制盒内部的顶部设置有第一电机和支撑座,所述第一电机通过螺栓安装在机械臂控制盒的内部,所述支撑座的顶部固定有安装底板,所述安装底板的顶部通过螺栓安装有连接底架,所述连接底架的上方设置有第一机械臂,所述第一机械臂的底部穿设有轴杆,所述轴杆与第一机械臂的底部固定连接,所述轴杆的输入轴连接有第二电机,所述第二电机通过螺栓安装在连接底架的一侧。
7、优选的,所述第一机械臂的顶部安装有活动座,所述活动座的内部穿设有活动轴,所述活动轴与活动座固定连接,所述活动轴的输入轴连接有第二电机,所述第二电机通过螺栓安装在第一机械臂上。
8、优选的,所述活动座固定连接有第二机械臂,所述第二机械臂的内部设置有第二液压油缸,所述第二液压油缸的一端通过螺栓安装在第二机械臂的内部,另一端连接有活动臂。
9、优选的,所述活动臂的一端通过螺栓安装有电机箱,所述电机箱的内部通过螺栓安装有第三电机,所述第三电机的输出轴连接有活动板。
10、优选的,所述活动板的一侧设置有红外扫描仪和红外摄像头;
11、红外扫描仪用于扫描行驶场景,并构建三维数据模型;
12、红外摄像头通过发出红外线照射行驶物体,利用红外线漫反射,被监控摄像头接收,形成视频图像。
13、优选的,所述活动板的内部开设有滑槽,所述滑槽的内部设置有双向丝杆,所述双向丝杆的输入轴连接有第四电机,所述第四电机通过螺栓安装在活动板上,所述红外扫描仪的两侧均设置有夹持板,所述夹持板固定有活动滑块,所述活动滑块与滑槽局部适配,且滑动连接,所述活动滑块的内部嵌入有丝杆套,所述丝杆套与双向丝杆螺纹配合。
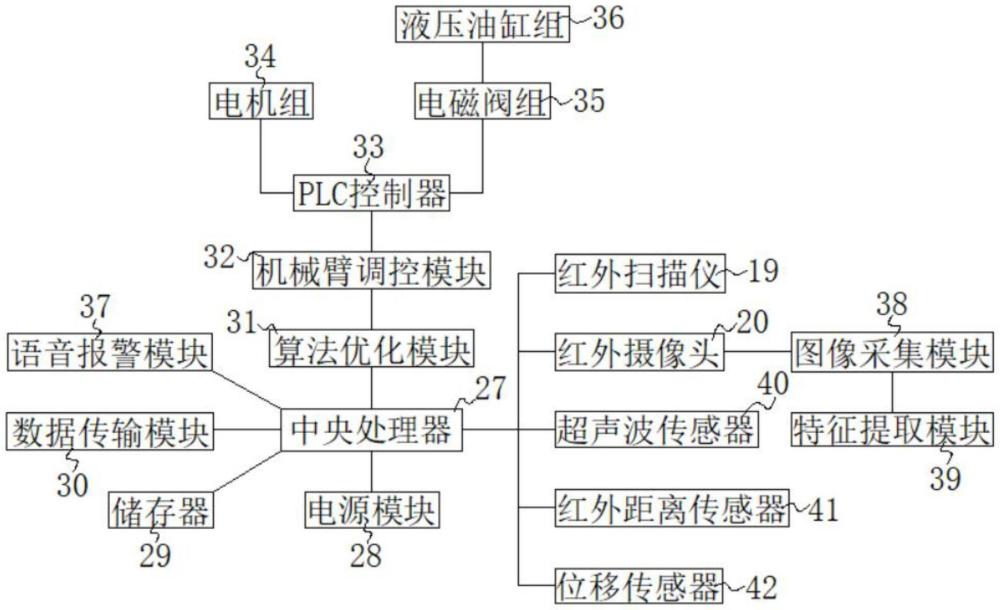
14、机械臂调控系统,包括中央处理器,所述中央处理器连接有电源模块、储存器和算法优化模块,所述算法优化模块连接有机械臂调控模块,所述机械臂调控模块连接有plc控制器,所述plc控制器连接有电机组和电磁阀组,所述电磁阀组连接有液压油缸组;
15、电源模块采用可充电锂电池,电源模块用于为机械臂调控系统的各个模块提供驱动电源;
16、储存器用于储存和备份机械臂调控系统运行状态的数据;
17、算法优化模块获取影像数据和三维数据模型,并对i cp配准算法的损失函数进行优化,获得优化后损失函数;
18、机械臂调控模块用于结合优化后损失函数对所有脊柱影像的特征点进行配准,获得脊柱三维模型,利用脊柱三维模型实现机械臂智能调控。
19、优选的,所述中央处理器连接有数据传输模块、语音报警器、超声波传感器、红外距离传感器和位移传感器;
20、数据传输模块采用g模块和wi f i模块,用于将数据传输至本地主机;
21、语音报警器用于提示机械臂调控系统运行状态超出预设阈值;
22、超声波传感器用于探测行驶障碍物;
23、红外距离传感器用于监测障碍物与机械臂之间的间距;
24、位移传感器用于获取机械臂的移动位移的距离。
25、优选的,所述红外摄像头连接有图像采集模块,所述图像采集模块连接有特征提取模块;
26、图像采集模块用于采用红外摄像头获取的视频和影像;
27、特征提取模块用于提取影像中机械臂执行的动作。
28、一种脊柱外科手术用机械臂调控系统的调控方法,包括以下步骤:
29、步骤s1、红外扫描仪扫描行驶场景,并构建三维数据模型,以及通过红外摄像头接收视频图像,并通过图像采集模块采用图像数据,结合通过特征提取模块提取影像中机械臂执行的动作;
30、步骤s2、通过超声波传感器探测行驶障碍物,并通过红外距离传感器监测障碍物与机械臂之间的间距,在机械臂行驶过程中,位移传感器获取机械臂的移动位移的距离,将机械臂精准移动至预设位置;
31、步骤s3、算法优化模块获取影像数据和三维数据模型,通过机械臂调控模块分析和重建以调控机械臂,通过对采集的影像进行自适应i cp配准生成对应的脊柱三维模型,根据脊柱三维模型进行后续的机械臂调控;
32、步骤s4、机械臂调控模块并控制plc控制器运行,plc控制器用于控制电机组的第一电机、第二电机、第三电机和第四电机,或者控制电磁阀组开启,通过电磁阀组控制液压油缸组的第一液压油缸和第二液压油缸运行。
33、与现有技术相比,本发明的有益效果如下:
34、本发明设置的第三电机可带动活动板的转动角度,改变活动板上的红外扫描仪和红外摄像头的扫描和覆盖面积。
35、本发明可将红外扫描仪安装在活动板上,并通过第四电机带动双向丝杆转动,双向丝杆可推动两个丝杆套和活动滑块在滑槽的内部相向,由于活动滑块与夹持板固定连接,可使得两个夹持板夹持红外扫描仪,将红外扫描仪和红外摄像头安装在活动板上。
36、本发明设置的红外扫描仪扫描行驶场景,并构建三维数据模型,以及通过红外摄像头接收视频图像,并通过图像采集模块采用图像数据,结合通过特征提取模块提取影像中机械臂执行的动作。
37、本发明通过超声波传感器探测行驶障碍物,并通过红外距离传感器监测障碍物与机械臂之间的间距,在机械臂行驶过程中,位移传感器获取机械臂的移动位移的距离,将机械臂精准移动至预设位置。
38、本发明设置的算法优化模块获取影像数据和三维数据模型,通过机械臂调控模块分析和重建以调控机械臂,通过对采集的影像进行自适应i cp配准生成对应的脊柱三维模型,根据脊柱三维模型进行后续的机械臂调控。
本文地址:https://www.jishuxx.com/zhuanli/20241009/306173.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。