一种基于图像处理的人工智能关节刨削设备的制作方法
- 国知局
- 2024-10-09 14:47:22
本发明涉及医疗设备,具体而言,涉及一种基于图像处理的人工智能关节刨削设备。
背景技术:
1、刨削设备用于在切削组织的同时将碎屑通过吸引器移除到关节外。刨削刀头和打磨钻头有不同的形状、长度和直径,有些刨削刀头可以折弯,以适应不同的手术空间需要。而关节镜针对不同切削位置的结构,有多种入路方法和多种运动路径。而需要进行刨削的不同的位置存在不同的特点,如果仅仅按照同一种方法,或者未进行预测路径,会导致损坏需要切削的位置的情况。所以需要通过关节镜采集到的图像以及生理特征数据分析出位置的特点,从而对其进行刨削。
技术实现思路
1、本发明的目的在于提供了一种基于图像处理的人工智能关节刨削设备,用以解决现有技术中存在的上述问题。
2、第一方面,本发明实施例提供了一种基于图像处理的人工智能关节刨削设备,包括处理器;
3、所述处理器用于执行下述步骤:
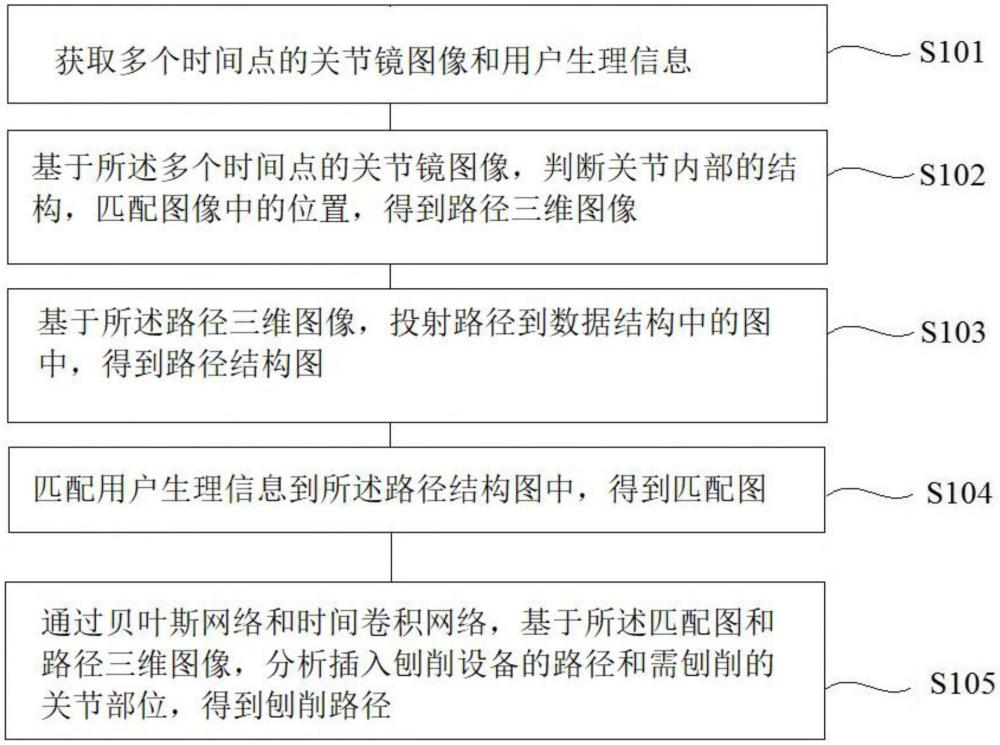
4、获取多个时间点的关节镜图像和用户生理信息;所述用户生理信息表示用户在采集多个时间点的关节镜图像时对应获取的生理信息;
5、基于所述多个时间点的关节镜图像,判断关节内部的结构,匹配图像中的位置,得到路径三维图像;
6、基于所述路径三维图像,投射路径到数据结构中的图中,得到路径结构图;所述路径结构图为由点集合和边集合表示的图;
7、匹配用户生理信息到所述路径结构图中,得到匹配图;
8、通过贝叶斯网络和时间卷积网络,基于所述匹配图和路径三维图像,分析插入刨削设备的路径和需刨削的关节部位,得到刨削路径;所述刨削路径表示完成从插入关节到刨削需刨削的关键部位的路径。
9、可选的,所述通过贝叶斯网络和时间卷积网络,基于所述匹配图和路径三维图像,分析插入刨削设备的路径和需刨削的关节部位,得到刨削路径,包括:
10、将所述匹配图对应的边集合在路径三维图像中对应的区域进行标记,得到标记三维图像;多个路径集合对应获得多个标记三维图像;
11、按照述路径集合中的点集合的连通的顺序,将所述路径集合中的边集合对应的键值对进行排列,得到路径向量;
12、将所述路径向量输入路径时间卷积网络,提取线段方向、线段长度和用户生理信息在不同时间点的特征,得到时间特征;
13、基于所述多个标记三维图像和路径向量,构建贝叶斯网络,提取特征,进行路径选择,得到贝叶斯特征;
14、将所述贝叶斯特征和时间特征输入反卷积网络,判断顺坏关节部位,重构图像,得到刨削路径。
15、可选的,所述基于所述路径三维图像,投射路径到数据结构中的图中,得到路径结构图,包括:
16、基于所述路径三维图像,得到多个部分路径核心架构点集合;所述部分路径核心架构点集合为将路径三维图像中获取的多个路径核心架构点进行分割的集合;
17、基于所述部分路径核心架构点集合,得到多条路径直线;
18、将相邻的两个部分路径核心架构点集合对应的路径直线的交点作为突变点;
19、将路径直线上的两个突变点按照连接位置,对突变点进行标记,得到路径线段起点和路径线段终点;
20、将路径直线上路径线段起点和路径线段终点之间的线段构作为路径线段;根据所述路径线段起点和路径线段终点,得到线段方向和线段长度;
21、基于所述路径线段起点、路径线段终点、路径线段、线段方向和线段长度,得到路径结构图。
22、可选的,所述基于所述多个标记三维图像和路径向量,构建贝叶斯网络,提取特征,进行路径选择,得到贝叶斯特征,包括:
23、将所述标记三维图像输入第一卷积网络,得到第一路径特征;多个标记三维图像对应获得多个第一路径特征;
24、获取所述第一路径特征和路径向量中的线段方向和线段长度作为输入值的第二卷积网络的准确性作为第一准确性;
25、获取路径向量中的用户生理信息和第一路径特征作为输入值的第三卷积网络的准确性作为第二准确性;
26、将所述第一准确性和第二准确性进行归一化,得到第一归一值和第二归一值;
27、按照所述第一归一值和第一归一值作为概率,将第一路径特征、路径向量中的线段方向和线段长度和路径向量中的用户生理信息构建贝叶斯网络;
28、根据所述贝叶斯网络,将第二卷积网络和第三卷积网络进行连接,得到检测网络;
29、将所述标记三维图像和路径向量输入训练好的检测网络,得到检测特征;多个标记三维图像对应获得多个检测特征;
30、将所述检测特征输入全连接网络,检测路径,得到检测值;多个检测特征对应获得多个检测值;
31、将所述多个检测值中大于其他检测值的检测值对应的检测特征作为贝叶斯特征。
32、可选的,所述基于所述多个时间点的关节镜图像,判断关节内部的结构,匹配图像中的位置,得到路径三维图像,包括:
33、将所述关节镜图像进行灰度化,得到关节镜灰度图像;
34、获得所述关节镜图像对应的运动方向、运动距离和拍摄偏移角度;所述运动方向表示在拍摄关节镜图像的关节镜在三维空间中的运动的方向;所述运动距离表示在拍摄当前时间点的关节镜图像的关节镜与拍摄上一个时间点的关键镜图像的关节镜之间的三维距离;所述拍摄偏移角度表示关节镜拍摄的角度;
35、将所述关节镜灰度图像按照运动方向、拍摄偏移角度和运动距离进行叠加,得到重叠三维图像;
36、获得关节固定图像;所述关节固定图像为存储在数据库中的包含完整关节结构的三维图像;
37、按照所述关节固定图像的关节内部结构,将所述重叠三维图像中的关节结构进行填充,得到路径三维图像。
38、可选的,所述基于所述路径线段起点、路径线段终点、路径线段、线段方向和线段长度,得到路径结构图,包括:
39、将所述路径直线的路径线段起点和路径线段终点加入点集合;
40、将所述线段方向和线段长度作为键值对的值,路径线段作为键值对的键,将所述路径线段加入边集合;
41、根据所述点集合和边集合构建路径结构图。
42、可选的,所述基于所述路径三维图像,得到多个部分路径核心架构点集合,包括:
43、将所述路径三维图像中的路径区域提出,得到路径区域图像;
44、根据所述路径区域图像,进行核心架构提取,得到路径核心架构;所述路径核心架构包括多个路径核心架构点;
45、以步长为1,每次从多个路径核心架构点中获取固定数量的路径核心架构点,得到多个部分路径核心架构点集合。
46、可选的,所述基于所述部分路径核心架构点集合,得到多条路径直线,包括:
47、将所述部分路径核心架构点集合进行拟合,得到多条路径直线;
48、若相邻的两个部分路径核心架构点集合对应的两条路径直线的夹角小于夹角阈值,删除所述的两条路径直线,将两个部分路径核心架构点集合中的值求取并集,得到新的部分核心架构点集合;
49、将新的部分核心架构点集合中的点进行拟合,得到新的路径直线。
50、可选的,所述匹配用户生理信息到所述路径结构图中,得到匹配图,包括:
51、获得所述路径结构图的键值对;所述键值对的值对应的为一个集合;
52、将所述用户生理信息加入路径结构图对应的键值对的值对应的一个集合中,得到匹配图。
53、可选的,还包括摄像设备、刨削设备、主机控制器、脚踏开关和lcd触摸屏;
54、所述刨削设备用于按照刨削路径进行刨削;
55、所述摄像设备用于获得多个时间点的关节镜图像;
56、所述脚踏开关用于控制电源连接;
57、所述主机控制器用于控制是否进行操作和进行摄像或刨削的操作;
58、所述lcd触摸屏用于图像显示。
59、相较于现有技术,本发明实施例达到了以下有益效果:
60、本发明实施例提供了一种基于图像处理的人工智能关节刨削设备,通过获取多个时间点的关节镜图像和用户生理信息。所述用户生理信息表示用户在采集多个时间点的关节镜图像时对应获取的生理信息。基于所述多个时间点的关节镜图像,判断关节内部的结构,匹配图像中的位置,得到路径三维图像。基于所述路径三维图像,投射路径到数据结构中的图中,得到路径结构图。所述路径结构图为由点集合和边集合表示的图。匹配用户生理信息到所述路径结构图中,得到匹配图。通过贝叶斯网络和时间卷积网络,基于所述匹配图和路径三维图像,分析插入刨削设备的路径和需刨削的关节部位,得到刨削路径。所述刨削路径表示完成从插入关节到刨削需刨削的关键部位的路径。
61、即,本发明实施例中,根据多个时间点的关节镜图像预测整个关节的三维图像,从而找到包含需要进行刨削的受到损坏的关节位置。并且通过路径能够找到可控刨削设备进行移动的通路。并且根据构建路径结构图,从而找到通路的核心架构,因为核心架构在通路的中央,所以能够最大限度的满足不触碰到关节边缘的位置,从而给关节带来损伤。根据构建键值对和匹配用户生理信息,保存每条路径上的构建刨削路径的特征。通过时间卷积网络找到路径在过程中路径的情况和用户生理信息的变化情况。根据所述贝叶斯网络找到在路径、包含关节内部结构的路径三维图像和用户生理信息的关联关系下设计网络的连接方式,从而使得能够更加准确的获取检测特征,从而按照检测特征和时间特征按照需要刨削的位置进行路径重构。达到了获取从入路到刨削关节部位的整个过程的路径。达到了提高刨削精度、提高刨削的准确性的技术效果。
本文地址:https://www.jishuxx.com/zhuanli/20241009/306515.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表