一种基于360°旋转机器人的结构设计方法
- 国知局
- 2024-10-09 15:03:47
本发明涉及机器人结构设计,具体涉及一种基于360°旋转机器人的结构设计方法。
背景技术:
1、随着人工智能技术的飞速发展与进步,机器人的智能化已经为现代机器人发展的终极目标,随着机器人发展速度的不断提升,应用的范围也不断拓展,出现很多类型的机器人,例如操作机器人、信息机器人、移动机器人等,机器人的不断发展为我们的生活提供很多的便利,同时也对于涉及的技术提出更为苛刻的要求,这就需要对技术机器人不断的创新与探索,进而适应机器人快速发展的具体需求,而scara机器人的出现促使智能机器人行业的发展有了前所未有的大突破,跟之前的机器人对比之下,更为操作简洁,灵活度更高,很快就在市场上占领一席之地,距今为止,scara机器人仍在发展中不断优化。
2、但是,目前传统的scara机器人在速度、精度、重量、转动惯量、旋转能力以及系统集成与可靠性等方面仍存在不足,无法得到高速高精度且轻量化的机器人,有待进一步改进。
技术实现思路
1、基于此,为了解决目前传统的scara机器人在速度、精度、重量、转动惯量、旋转能力以及系统集成与可靠性等方面仍存在不足,无法得到高速高精度且轻量化的机器人的问题,本发明的目的在于提供一种基于360°旋转机器人的结构设计方法,其具体技术方案如下:
2、一种基于360°旋转机器人的结构设计方法,应用于360°旋转机器人,所述360°旋转机器人包括基座、大臂和小臂,所述大臂的一端通过第一关节与所述基座转动连接,所述小臂的一端通过第二关节与所述大臂远离所述第一关节的一端转动连接,所述第一关节内设置有第一电机和第一减速器,所述第二关节内设置有第二电机和第二减速器,所述结构设计方法包括:
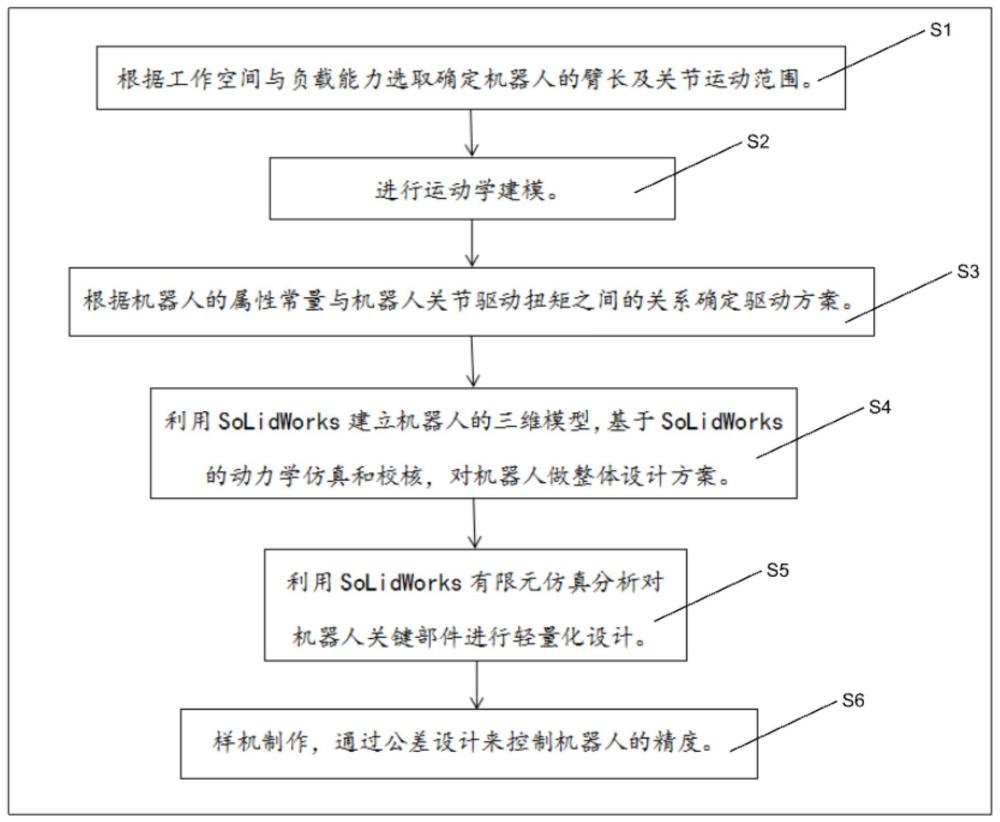
3、根据工作空间与负载能力选取确定机器人的臂长及关节运动范围;
4、进行运动学建模;
5、根据机器人的属性常量与机器人关节驱动扭矩之间的关系确定驱动方案选型;
6、利用solidworks建立机器人的三维模型,基于solidworks的动力学仿真和校核,对机器人做整体设计方案;
7、利用solidworks有限元仿真分析对机器人关键部件进行轻量化设计。
8、进一步地,进行运动学建模的具体方法如下:将大臂的末端设置为a,将小臂的末端设置为b,以第一关节为坐标原点o,建立笛卡尔坐标系,b的x轴坐标为向量oa与向量ab在x轴上投影之和,b的y轴坐标为向量oa与向量ab在y轴上投影之和,运动学方程如下:
9、;
10、对运动学方程整理得:
11、;
12、其中,l1为所述大臂的臂长,l2为所述小臂的臂长;
13、根据以上运动学反解的建模,给定l1和l2的数据,由运动学方程给末端b在广义坐标系下的坐标,推出支链的关节角参数,确定大臂和小臂的运动状态。
14、进一步地,对于所述第一关节和所述第二关节所需的驱动扭矩t,按第一电机和第二电机运行到最大角速度时计算驱动扭矩t,计算公式如下:
15、t=j*;
16、由平行轴定理可得:
17、j=jg1+m1l12+jg2+m2l22;
18、其中jg1为所述大臂绕其重心轴的转动惯量,jg2为所述小臂绕其重心轴的转动惯量,m1为所述大臂的重量,m2为所述小臂的重量,l1为所述大臂的臂长,l2为所述小臂的臂长。
19、进一步地,所述第一关节内设置有法兰套,所述法兰套内设置有轴承作为转动支承,所述法兰套包括外法兰盘和内法兰盘,所述外法兰盘与所述基座固定连接,所述内法兰盘连接所述大臂。
20、进一步地,利用solidworks建立机器人的三维模型后,设置好约束条件,启动solidworks motion插件,将马达驱动参数设置到所述第一关节的内法兰盘中,以26秒作为一个加减速循环,从第1秒到第11秒时间内使所述第一关节从0运动到最大角速度,保持4秒后,从第15秒到第25秒使第一关节角速度逐渐减小至0,设置好马达参数后开始计算仿真,利用solidworks motion插件验证了机器人核心部件选型的正确性。
21、进一步地,利用solidworks有限元仿真分析对机器人关键部件进行轻量化设计的具体步骤包括:
22、机器人关节座强度校核;
23、机器人模态分析:分析机器人前五阶固有频率;
24、大臂与小臂强度校核及优化设计,利用solidworks中的拓扑模块对大臂进行拓扑优化,通过solidworks内置的质量评估功能,对大臂拓扑优化后模型与为拓扑前模型进行对比;
25、机器人整机强度校核:对机器人设置整机网格划分。
26、进一步地,所述机器人关节座强度校核的具体方法如下:对外法兰盘进行静应力分析,先对外法兰盘进行网格划分,然后对所述第二关节处施加1000n的载荷,固定外法兰盘底面,然后对外法兰盘进行静应力分析。
27、进一步地,所述大臂与小臂强度校核及优化设计的具体方法如下:采用自由网格划分方法,以四面体为主的网格划分,固定第一关节内法兰盘的连接面,对大臂第二关节施加1000n载荷,进行静应力分析。
28、进一步地,所述结构设计方法包括样机制作,通过公差设计来控制机器人的精度。
29、进一步地,利用过盈配合的方法设计法兰套。
30、相比现有技术,本发明的有益效果在于:本发明的基于360°旋转机器人的结构设计方法通过根据工作空间与负载能力选取确定机器人的臂长及关节运动范围,本方法能够确保机器人在指定的工作平台上高效运作;通过运动学建模,可以准确描述机器人在不同关节角度下的位置和姿态,为后续的路径规划和运动控制提供坚实的理论基础;根据机器人的属性常量与关节驱动扭矩之间的关系确定驱动方案,能够确保机器人在满足工作需求的同时,实现能源的高效利用,合理选择电机和减速器的类型和参数,能够减少能源消耗,提高系统的可靠性和使用寿命;利用solidworks等三维建模软件进行机器人的三维建模,不仅可以直观地展示机器人的外观和结构,还可以通过动力学仿真和校核,对机器人的整体设计方案进行验证和优化,有助于在设计阶段就发现和解决潜在的问题,减少后续的生产和调试成本,通过有限元仿真分析对机器人关键部件进行轻量化设计,可以在保证结构强度和刚度的前提下,减轻机器人的整体重量,这不仅可以提高机器人的运动性能,还可以降低能耗和成本;本发明的基于360°旋转机器人的结构设计方法设计出来的机器人具备全方位的旋转能力,能够在任何方向上灵活移动和操作,实现了对机器人结构的全面优化和性能提升,不仅提高了机器人的工作效率和可靠性,还降低了生产成本和能耗,实现了高速高精度的效果。
技术特征:1.一种基于360°旋转机器人的结构设计方法,应用于360°旋转机器人,所述360°旋转机器人包括基座、大臂和小臂,所述大臂的一端通过第一关节与所述基座转动连接,所述小臂的一端通过第二关节与所述大臂远离所述第一关节的一端转动连接,所述第一关节内设置有第一电机和第一减速器,所述第二关节内设置有第二电机和第二减速器,其特征在于,所述结构设计方法包括:
2.根据权利要求1所述的方法,其特征在于,进行运动学建模的具体方法如下:将大臂的末端设置为a,将小臂的末端设置为b,以第一关节为坐标原点o,建立笛卡尔坐标系,b的x轴坐标为向量oa与向量ab在x轴上投影之和,b的y轴坐标为向量oa与向量ab在y轴上投影之和,运动学方程如下:
3.根据权利要求2所述的方法,其特征在于,对于所述第一关节和所述第二关节所需的驱动扭矩t,按第一电机和第二电机运行到最大角速度时计算驱动扭矩t,计算公式如下:
4.根据权利要求1所述的方法,其特征在于,所述第一关节内设置有法兰套,所述法兰套内设置有轴承作为转动支承,所述法兰套包括外法兰盘和内法兰盘,所述外法兰盘与所述基座固定连接,所述内法兰盘连接所述大臂。
5.根据权利要求4所述的方法,其特征在于,利用solidworks建立机器人的三维模型后,设置好约束条件,启动solidworks motion插件,将马达驱动参数设置到所述第一关节的内法兰盘中,以26秒作为一个加减速循环,从第1秒到第11秒时间内使所述第一关节从0运动到最大角速度,保持4秒后,从第15秒到第25秒使第一关节角速度逐渐减小至0,设置好马达参数后开始计算仿真,利用solidworks motion插件验证了机器人核心部件选型的正确性。
6.根据权利要求4所述的方法,其特征在于,利用solidworks有限元仿真分析对机器人关键部件进行轻量化设计的具体步骤包括:
7.根据权利要求6所述的方法,其特征在于,所述机器人关节座强度校核的具体方法如下:对外法兰盘进行静应力分析,先对外法兰盘进行网格划分,然后对所述第二关节处施加1000n的载荷,固定外法兰盘底面,然后对外法兰盘进行静应力分析。
8.根据权利要求1所述的方法,其特征在于,所述大臂与小臂强度校核及优化设计的具体方法如下:采用自由网格划分方法,以四面体为主的网格划分,固定第一关节内法兰盘的连接面,对大臂第二关节施加1000n载荷,进行静应力分析。
9.根据权利要求4所述的方法,其特征在于,所述结构设计方法包括样机制作,通过公差设计来控制机器人的精度。
10.根据权利要求9所述的方法,其特征在于,利用过盈配合的方法设计法兰套。
技术总结本发明提供一种基于360°旋转机器人的结构设计方法,应用于360°旋转机器人,结构设计方法包括:根据工作空间与负载能力选取确定机器人的臂长及关节运动范围;进行运动学建模;根据机器人的属性常量与机器人关节驱动扭矩之间的关系确定驱动方案;利用SolidWorks建立机器人的三维模型,基于SolidWorks的动力学仿真和校核,对机器人做整体设计方案;利用SolidWorks有限元仿真分析对机器人关键部件进行轻量化设计。本发明的基于360°旋转机器人的结构设计方法设计出来的机器人具备全方位的旋转能力,能够在任何方向上灵活移动和操作,实现了对机器人结构的全面优化和性能提升,不仅提高了机器人的工作效率和可靠性,还降低了生产成本和能耗,实现了高速高精度的效果。技术研发人员:王恺,谢凌波,卢清华,陈为林,张云志,张清华受保护的技术使用者:佛山大学技术研发日:技术公布日:2024/9/29本文地址:https://www.jishuxx.com/zhuanli/20241009/307473.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表