用于进行清洁的方法、清洁设备和运输工具与流程
- 国知局
- 2024-10-15 09:26:22
本发明涉及一种用于进行清洁的方法、一种清洁设备和一种运输工具。
背景技术:
1、已经提出了用于在自主地或半自主地运行的运输工具中清洁至少一个驾驶辅助传感器的方法,该运输工具具有至少一个环境传感器单元。
技术实现思路
1、本发明涉及一种用于在自主地或半自主地运行的运输工具中清洁至少一个驾驶辅助传感器、尤其激光雷达传感器、摄像机传感器、雷达传感器等的方法,该运输工具具有至少一个尤其与驾驶辅助传感器间隔开地布置的环境传感器单元。
2、提出了,在至少一个方法步骤中,至少根据环境传感器单元的至少一个测量参数来从用于清洁驾驶辅助传感器、尤其驾驶辅助传感器的至少一个传感器区域表面的多个尤其预先规定的优选不同的清洁程序中选择和/或设定清洁程序。
3、因为尤其能够依赖于较少或仅唯一的环境传感器单元的至少一个测量参数来执行对多个驾驶辅助传感器的清洁,所以通过所述用于进行清洁的方法的按照本发明的设计方案能够有利地提供具有低成本的结构。因为尤其只需要在运输工具中安装较少的或仅单个环境传感器单元以便为驾驶辅助传感器中的每个驾驶辅助传感器选择清洁程序,所以有利地能够提供低装配复杂度。因为能够尤其至少根据环境传感器单元的测量参数来最佳地选择清洁程序,所以有利地能够实现高清洁效率。因为尤其仅在需要的情况下才清洁至少一个驾驶辅助传感器并且/或者仅在需要的情况下才施加/消耗冲洗水以清洁至少一个驾驶辅助传感器,所以有利地能够降低磨损和/或冲洗水消耗。
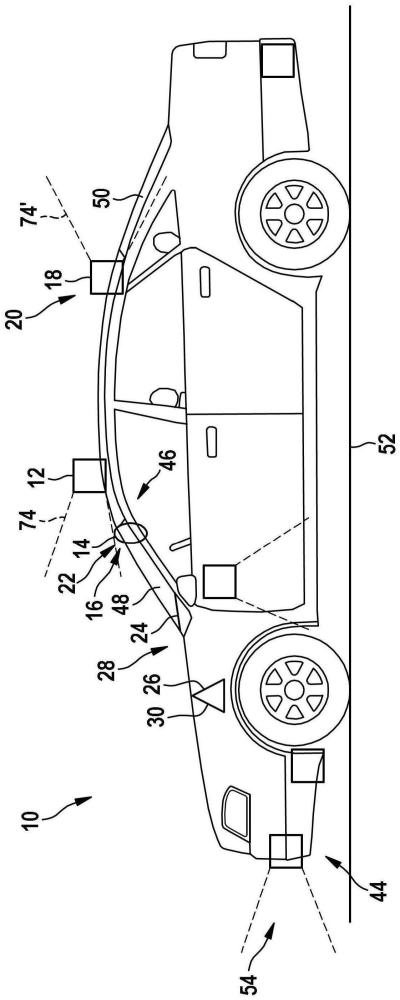
4、优选在运输工具之中或之处布置至少一个优选光学驾驶辅助传感器和/或至少一个优选光学环境传感器单元。特别地,至少一个驾驶辅助传感器与至少一个环境传感器间隔开地布置。特别地,至少一个、优选所有驾驶辅助传感器和至少一个环境传感器单元布置在运输工具的不同的区域中、如例如顶盖区域、前部区域、尾部区域、侧部区域、底盘区域等中。优选运输工具具有多个驾驶辅助传感器。特别地,运输工具的不同的区域分别具有至少一个驾驶辅助传感器。优选运输工具构造为汽车和/或载货车和/或船舶和/或飞行工具和/或无人机。
5、优选运输工具的自主的和/或半自主的行驶功能能够由至少一个驾驶辅助传感器来实现。“光学驾驶辅助传感器”在此应该尤其理解为下述传感器,该传感器监测运输工具的周围环境并且将其传送到运输工具的控制器处。运输工具的控制器能够基于传感器数据来计算和/或输出用于运输工具的行驶运行的控制指令、警告、提示或建议。优选驾驶辅助传感器的测量原理基于对电磁辐射的接收和/或发送。特别地,电磁辐射在接收之前经过传感器区域、尤其运输工具窗板和/或传感器的保护盖。特别地,电磁辐射在发送之后经过传感器区域、尤其运输工具窗板和/或传感器的保护盖。能够设想到,传感器设置用于进行高频的间距及速度测量,以用于进行目标识别和/或避免碰撞。传感器例如能够例如通过车道保持辅助装置、停车辅助装置、距离报警器、危险识别系统等来控制和调节运输工具的自主的和/或计算机辅助的运行或者用于支持手动的行驶运行。能够设想到,传感器、尤其传感器之一构造为雷达传感器。
6、特别地,驾驶辅助传感器具有至少一个清洁单元。优选运输工具具有驾驶辅助传感器的清洁单元。在此能够设想到,运输工具具有多个清洁单元,这些清洁单元分别配属于不同的驾驶辅助传感器。特别地,清洁单元设立用于清洁相应的配属的驾驶辅助传感器。在此,清洁单元能够具备不同的清洁程序,这些清洁程序例如能够拥有不同的清洁强度。优选为了清洁驾驶辅助传感器而尤其接触式地在传感器的传感器区域表面上引导驾驶辅助传感器的传感器刮水器单元。特别地,在用于清洁驾驶辅助传感器的方法中确定传感器刮水器单元的运动速度和/或清洁间隔。特别地,在用于清洁驾驶辅助传感器的方法中确定用于对有待清洁的传感器的传感器区域表面进行冲洗水润湿的冲洗水量和/或冲洗水间隔和/或冲洗水压力和/或另外的清洁参数。“清洁程序”在此应该尤其理解为预先规定的清洁参数、如例如传感器刮水器单元的清洁间隔和/或运动速度并且/或者冲洗水供应的压力、量和/或间隔。特别地,通过在方法步骤中选择清洁程序来确定相应的清洁强度和/或相应的清洁方法,该清洁方法在瞬时激活相应的清洁单元时由清洁单元来实施。“选择”在此应该尤其理解为对程序和/或区域的分配。“设定”在此应该尤其理解为对所选择的和/或所分配的和/或所确定的程序的激活。“设立”应该尤其理解为专门程序化、设计和/或装备。“物体设立和/或设置用于特定的功能”应该尤其理解为物体在至少一种使用状态和/或运行状态中满足和/或实施这种特定的功能。特别地,环境传感器单元设置测量运输工具的至少一个构造为环境参数的测量参数、尤其周围环境。能够设想到,环境传感器单元具有单个环境传感器或多个环境传感器,这些环境传感器优选分别探测不同的环境参数。优选环境传感器单元的环境传感器组合使用。
7、此外提出了,在至少一个另外的方法步骤中,至少根据环境传感器单元的至少一个测量参数、优选环境传感器单元的在方法步骤中所考虑的测量参数来从用于清洁自主地或半自主地运行的运输工具的另外的驾驶辅助传感器、尤其另外的驾驶辅助传感器的至少一个传感器区域表面的多个尤其预先规定的清洁程序中选择和/或设定清洁程序。因为尤其能够依赖于唯一的环境传感器单元的至少一个测量参数来执行对运输工具的驾驶辅助传感器、另外的驾驶辅助传感器和/或附加的另外的驾驶辅助传感器的清洁,所以有利地能够提供具有低成本的结构。因为尤其只需要在运输工具中安装较少的环境传感器单元以便为驾驶辅助传感器、另外的驾驶辅助传感器和/或另外的附加的驾驶辅助传感器选择清洁程序,所以有利地能够提供低装配复杂度。因为尤其能够至少根据环境传感器单元的测量参数来最佳地选择清洁程序,所以有利地能够实现高清洁效率。能够设想到,在运输工具之处或之中相对于驾驶辅助传感器和另外的驾驶辅助传感器布置多个另外的附加的驾驶辅助传感器。优选为驾驶辅助传感器和/或另外的驾驶辅助传感器和/或另外的附加的驾驶辅助传感器个性化地从多个尤其预先规定的清洁程序中选择清洁程序。能够设想到,为驾驶辅助传感器和/或另外的驾驶辅助传感器并且/或者为另外的附加的驾驶辅助传感器提供相同的清洁程序或不同的个性化的清洁程序选择。优选不依赖于其余驾驶辅助传感器来为驾驶辅助传感器、另外的驾驶辅助传感器并且/或者为一个或多个另外的附加的驾驶辅助传感器选择清洁程序。能够设想到,为驾驶辅助传感器、另外的驾驶辅助传感器并且/或者一个或多个另外的附加的驾驶辅助传感器在至少一种运行状态中选择相同的清洁程序。优选根据环境传感器单元的相同的测量参数来为驾驶辅助传感器选择清洁程序。替代地,能够由环境传感器单元的不同的测量参数来为不同的驾驶辅助传感器或多个驾驶辅助传感器的组件选择清洁程序。
8、此外提出了,驾驶辅助传感器和另外的驾驶辅助传感器具有不同定向的视场。因为能够尤其利用一个和/或较少的环境传感器单元来高效地清洁具有不同定向的视场的所有驾驶辅助传感器,所以有利地能够降低复杂度。优选驾驶辅助传感器和另外的驾驶辅助传感器的视场相对于彼此无重叠。驾驶辅助传感器中的一个驾驶辅助传感器例如能够沿行驶方向定向,并且其他驾驶辅助传感器逆着行驶方向定向。驾驶辅助传感器中的一个驾驶辅助传感器例如能够沿行驶方向定向,并且其他驾驶辅助传感器与行驶方向成角度地定向。驾驶辅助传感器中的一个驾驶辅助传感器例如能够以第一角度相对于行驶方向定向,并且其他驾驶辅助传感器以与第一角度不同的第二角度相对于行驶方向定向。然而也能够设想到,两个驾驶辅助传感器的视场至少部分地重叠。“视场”(英文:field of view)在此应该尤其理解为光学装置的视角,在该视角内探测和/或记录事件或变化。
9、此外提出了,环境传感器单元通过用于控制和/或激活运输工具的窗板刮水器、尤其前窗板刮水器的传感器单元来构成。因为尤其环境传感器以及用于控制和/或激活窗板刮水器的传感器单元构造为一个构件,所以有利地能够提供低装配复杂度。有利地,能够实现针对用于控制和/或激活窗板刮水器的传感器单元的数据的额外益处。例如,构成环境传感器单元的传感器单元在运输工具内部空间中优选以接触前窗板的方式布置在后视镜底座区域中、尤其驾驶员的视野范围外。特别地,传感器单元至少基本上布置在前窗板的由前窗板刮水器所扫过的面内。特别地,环境传感器单元通过如例如从窗板刮水器控制中已知的雨-光-气候-传感器来构成。
10、此外提出了,测量参数中的至少一个测量参数构造为润湿程度。因为润湿程度尤其表现为用于探测雨水和/或污垢的精确且可靠的特性值,所以有利地能够提供高运行安全性。有利地,对清洁程序的选择能够依赖于已经存在于传感器上的液体量。如果本来就已经下雨,则例如能够降低喷洒的清洁液量。优选连续地和/或定期地由环境传感器单元来监测润湿程度。优选确定测量面上的润湿程度。能够设想到,用于确定润湿程度的测量面构造为前窗板的一部分。“润湿程度”在此应该尤其理解为相对的、优选按百分比计算的占比,该占比作为测量面的关于环境传感器的整个测量面的、由液体(如例如雨水、冲洗水等)和/或固体(如例如污垢、灰尘、盐、花粉、污泥等)所润湿的/所遮盖的面积。特别地,润湿程度设立用于采用0至1的值。例如能够通过由环境传感器单元的所发送的光信号的所反射的光的占比来查明润湿程度。
11、附加地提出了,测量参数中的至少一个测量参数构造为光强度、尤其环境传感器单元的所反射的传感器信号的光强度。有利地,对清洁程序的选择能够依赖于污染类型。在所测量的光强度剧烈降低的情况下例如能够推断出驾驶辅助传感器的例如由于盐、灰尘等所致的固体污染,从而例如能够将所使用的清洁液的量或类型与此适配。特别地,传感器信号构造为一个和/或多个电磁波、尤其构造为指向的电磁波、如例如激光束或类似光束。优选传感器信号至少基本上被所润湿的和/或所污染的窗板反射,其中,传感器信号被环境传感器单元的尤其未润湿的和/或未受污染的至少基本上透明的测量面透射。优选环境传感器单元具有至少一个探测单元,该探测单元设立用于检测所反射的传感器信号。特别地,润湿程度与所反射的传感器信号的光强度成比例地构造。
12、此外提出了,测量参数中的至少一个测量参数构造为气候参数、例如温度和/或相对空气湿度。因为尤其由于在选择清洁程序时考虑到气候参数而能够提供高清洁效率和高可靠性,所以有利地能够提供高运行安全性。优选气候参数构造为温度和/或空气湿度、尤其相对空气湿度和/或气压和/或co2含量等。替代地,能够至少部分地由外部的传感器单元提供和/或从控制器中读取出测量参数。
13、此外提出了,在至少一个另外的方法步骤中,附加地至少根据相应的驾驶辅助传感器的视场相对于运输工具的前进方向的定向和/或根据相应的驾驶辅助传感器在运输工具中的位置来选择和/或设定用于清洁所述驾驶辅助传感器/多个驾驶辅助传感器的清洁程序。因为尤其依赖于驾驶辅助传感器的定向和位置来选择清洁程序,所以有利地能够提供特别高的清洁效率。“前进方向”在此应该尤其理解为在运输工具的正常行驶时主要存在的运动方向。特别地,前进方向至少基本上平行于运输工具的纵向延伸布置。优选前进方向至少基本上平行于朝前窗板的与运输工具乘员相反设置的侧部运动的位置指向的方向布置。特别地,前进方向至少基本上和/或大部分平行于环境传感器单元的视线方向、尤其主视线方向布置。“主视线方向”在此尤其应该理解为尤其通过平均值形成、从视角中所查明的平均方向。
14、附加地提出了,在至少一个另外的方法步骤中,附加地至少根据运输工具的速度和/或运输工具的能从运输工具的控制器中读取出的另外的运行参数、如例如运输工具的周围环境中的交通流量或运输工具的清洁系统的清洁剂注填水平来选择和/或设定用于清洁所述驾驶辅助传感器/多个驾驶辅助传感器的清洁程序。因为尤其通过考虑运输工具的运行参数而能够更为精确地选择清洁程序,所以有利地能够提供高清洁性能和/或清洁效率。优选从运输工具的控制器中读取出运输工具的速度和/或运输工具的另外的运行参数。替代地能够设想到,环境传感器单元和/或另外的传感器单元直接地、尤其不依赖于控制器来提供速度和/或另外的运行参数。特别地,运输工具的运行参数构造为平均速度、行程持续时间、距前方行驶的运输工具的间距等。作为替代方案或附加方案,也能够从运输工具的导航设备和/或从外部提供的数据、如例如交通信息和/或智能手机数据和/或基于云的信息数据等中来提供至少一个运行参数。“控制器”应该尤其理解为下述电子单元,该电子单元优选至少部分地集成在运输工具的控制和/或调节单元中,并且该电子单元优选设立用于控制和/或调节运输工具的至少一个运行。优选控制器包括计算单元并且尤其除了计算单元外还包括具有存储在其中的控制和/或调节程序的存储器单元,该控制和/或调节程序设置用于由计算单元来实施。
15、此外提出了,在至少一个方法步骤中,从至少两个、优选至少三个或超过三个参数、尤其测量参数和/或能考虑用于选择清洁程序的另外的参数中形成总系数,根据该总系数来选择和/或设定用于清洁至少驾驶辅助传感器的清洁程序。因为尤其将具有不同的信息的多个参数纳入到评定中,所以有利地能够提供高运行安全性和/或清洁效率。优选通过累加各个参数来确定总系数。替代地,也能够通过相乘或类似的运算操作来查明总系数。能够设想到,通过评估系统、尤其通过对参数的加权和/或分组来估计清洁程序。
16、此外提出了,在至少一个方法步骤中,例如根据时间间隔的期满和/或根据驾驶辅助传感器的所探测到的污染程度来查明针对驾驶辅助传感器的清洁需求,并且在肯定式地(positiven)确定清洁需求的情况下启动在方法步骤中所选择的和/或所设定的清洁程序。因为只有当确定了清洁需求时才尤其选择清洁程序并且清洁驾驶辅助传感器,所以有利地能够提供高清洁效率。优选根据驾驶辅助传感器的传感器区域表面的、由驾驶辅助传感器的清洁需求控制单元所查明的污染程度和/或润湿程度来确定驾驶辅助传感器的清洁需求。优选时间间隔能设定地构造。
17、此外提出了一种清洁设备,该清洁设备用于在自主地或半自主地运行的运输工具中至少清洁驾驶辅助传感器,该运输工具至少具有环境传感器单元,其中,清洁设备具有控制和/或调节单元,该控制和/或调节单元至少设立用于,至少根据环境传感器单元的至少一个测量参数来从用于清洁驾驶辅助传感器、尤其驾驶辅助传感器的至少一个传感器区域表面的多个尤其预先规定的清洁程序中选择和/或设定清洁程序。因为控制和/或调节单元尤其能够处理测量参数和/或参数并且能够选择最佳的清洁程序,所以有利地能够提供运行功能。“控制和/或调节单元”应该尤其理解为具有至少一个控制电子器件的单元。“控制电子器件”应该尤其理解为下述单元,该单元具有处理器单元并且具有存储器单元以及具有存储在存储器单元中的运行程序。
18、此外提出了一种半自主的或全自主的运输工具,该运输工具具有至少一个驾驶辅助传感器并且具有至少一个环境传感器单元,其中,运输工具设立用来执行所述用于进行清洁的方法,并且/或者其中,运输工具具有清洁设备。因为尤其能够提供高清洁性能和/或清洁效率,所以有利地能够提供高运行安全性。因为尤其只有在需要的情况下才进行清洁和/或消耗冲洗水,所以有利地能够降低磨损和/或冲洗水消耗。因为尤其能够通过清洁设备来提供高清洁效率,所以有利地能够提供运输工具运行的高可靠性。
19、用于进行清洁的按照本发明的方法、按照本发明的清洁设备以及按照本发明的运输工具在此应该不局限于上面描述的使用方式和实施方式。特别地,用于进行清洁的按照本发明的方法、按照本发明的清洁设备以及按照本发明的运输工具为了满足这里所描述的功能方式而能够具有与这里所提及的数量不同的数量的各个元件、构件和单元以及方法步骤。此外,就本公开内容所规定的取值范围而言,位于所提及的边界值之内的值也应该视为公开并且能够任意地使用。
本文地址:https://www.jishuxx.com/zhuanli/20241015/314125.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表