燃料电池空气系统提前控制的解耦方法
- 国知局
- 2024-10-15 10:01:50
本发明属于燃料电池,涉及一种燃料电池空气系统提前控制的解耦方法。
背景技术:
1、燃料电池的空气系统可被视为其“肺”,其中关键的控制参数包括进气流量和进气压力。有效地控制进气流量有助于预防氧气不足,而稳定的进气压力则可以减缓电堆内的压力波动,从而延长质子交换膜的使用寿命。现有技术无法满足燃料电池对阴极进气流量和压力的高精度控制需求,以及对环境适应性的严格要求,难以在时间尺度上的进气流量和压力的提前控制。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种燃料电池空气系统提前控制的解耦方法。
2、为达到上述目的,本发明提供如下技术方案:
3、一种燃料电池空气系统提前控制的解耦方法,包括以下步骤:
4、s1:设计时序预测算法,实现燃料电池发动机短时功率预测;用滑动窗分析对功率需求时间序列数据进行特征工程,结合相空间重构理论构建基于递归最小二乘支持向量机的递归预测模型的输入和输出向量空间,采用自相关性分析确定相空间重构嵌入维度,提出短期功率预测算法;
5、s2:根据实验台架测试出不同压力、流量下,空压机的需求转速,背压阀的需求开度,为前馈控制提供数据支撑;
6、s3:通过台架实验,获取在一定范围内背压阀开度与空压机转速下,空气系统压力、流量的变化数据,为解耦控制提供数据;
7、s4:在数据驱动的方法下,辨识空气系统的传递函数的,再结合对角矩阵解耦方法设计的相应的解制器;
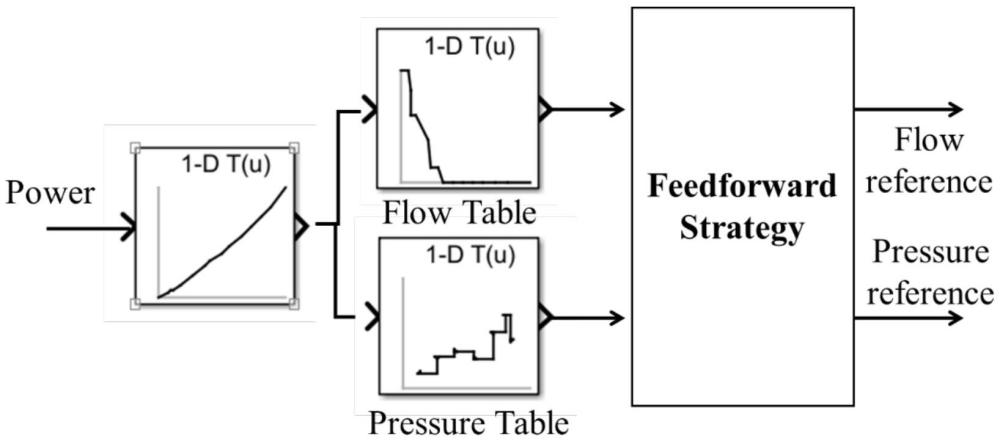
8、s5:将短期功率的预测值通过查表法,得到所需的空压机转速和背压阀开度;
9、s6:通过压力和流量的相对控制误差可分析空气系统的解耦效果,通过执行器总变化量值,分析执行器的波动变化情况。
10、进一步,步骤s1具体包括以下步骤:
11、s11:设含n个数据点的燃料电池整车需求功率时间序列为[p1,p2,p3,…,pn]t,选择嵌入维度m和时间延迟τ,构造输入向量xt=[pt-(m-1)τ…,pt-2τ,pt-τ,pt]∈rm;嵌入维度是指历史时序数据点输入个数,时间延迟是指输入历史时序数据点的时间间隔;对应预测输出变量为yt+h=[pt+h]∈r1,其中h为预测步长,称为h步向前预测(h-step ahead prediction),h步向前预测的需求功率时间序列递归预测模型如下:
12、
13、其中,f(·)为泛化的平滑非线性映射;
14、s12:基于相空间重构法,建立当滑动窗宽l=9、嵌入维度m=5、时间延迟τ=2和滑动周期t=4时,需求功率时间序列预测输入输出样本对,如以下公式所示:
15、
16、式中,分别为重构相空间后的输入矩阵和期望输出矩阵,需求功率时间序列用[p1,p2,p3,…,pn]t表示,以重构相空间后的输入样本矩阵作为预测模型f(·)的输入,估计未来时刻的被预测数据值;
17、s13:自相关系数计算公式定义为:
18、
19、式中,滞后数k=1,2,…;所述自相关系数为将样本点个数为n的时间序列数据y=[y1,y2,y3,…,yn]t按照滞后数为k所构造的两列样本点序列yt=[y1+k,y2+k,y3+k,…,yn]t和yt-k=[y1,y2,y3,…,yn-k]t的相关程度。
20、进一步,构建一种迭代学习框架,通过几次时间步长较短的迭代预测取代一次性完成较大时间跨度预测的方式,基于重构嵌入相空间理论,分别构造出第x次迭代中用于预测功率和功率变化率的学习元的训练数据集和如以下公式所示:
21、[p(t+β);p(t+2β);…;p(t+xβ);p′(t+β);p′(t+2β);…;p′(t+xβ)]=f(p(t),p′(t),p″(t))
22、式中,f(·)表示训练后的ilf迭代学习框架的抽象非线性映射。
23、进一步,步骤s3具体包括以下步骤:
24、s31:搭建和调试试验台;
25、s32:设定空压机转速m序列的幅值范围和背压阀开度;
26、s33:同时考虑辨识算法、控制系统的采样周期以及传感器的灵敏度,选择m序列的采样周期,设置采样时间。
27、进一步,步骤s31所述搭建和调试试验台,具体包括:
28、(1)确定试验台的拓扑结构,确定元件选型和管道设计;
29、(2)根据拓扑结构进行机械和电气连接,并对机械和电气连接进行测试;
30、(3)校准每个传感器;
31、(4)测试空压机和背压阀的状态;
32、(5)根据电堆、中冷器、加湿器的压降分别标定各球阀的开度;
33、(6)在全范围运行条件下对系统台架进行测试。
34、进一步,步骤s33中,采样时间设置为:
35、
36、t0是采样周期,t95是控制对象达到目标值95%的响应时间,根据实际情况将分母设为5~15范围内的任一常数。
37、进一步,步骤s4具体包括以下步骤:
38、s41:在压缩机转速的一定范围内,选择多个平衡工作点进行系统辨识;
39、s42:将系统的输入与输出关系描述为一个一阶惯性环节,空气系统的模型结构用以下公式表示:
40、
41、其中是空气流量的增量,δp是压力的增量,δn为压缩机转速的增量,δγ为背压阀开度的增量。
42、s43:通过数据驱动的方法,进行空气系统双输入双输出传递函数的辨识;
43、s44:通过在控制系统中添加矩阵,构建对角矩阵解耦控制器,具体包括:矩阵与对象特征矩阵乘积形成的广义对象矩阵成为对角矩阵,从而实现系统解耦:
44、
45、当被控对象的数学模型矩阵是非奇异的,解耦补偿矩阵写为:
46、
47、进一步,步骤s6具体包括:
48、使用流量和压力的平均绝对误差的平方,同时分析包括空气压缩机和背压阀在内的执行器的总变化,如下式所示:
49、
50、其中pressure(t),flow(t)表示某一时刻的压力和流量,pressure_mae,flow_mae,pressure_mae表示压力和流量的平均值。解耦策略解耦效果越好,flow_mae和pressure_mae越小,tv越小,稳定性和抗干扰性越好。
51、本发明的有益效果在于:本发明中所提出的燃料电池空气系统提前解耦方法,设计时序预测算法,可实现燃料电池发动机短时功率预测,通过获取空气系统流量压力与空压机转速和背压阀开度数据可实现压力流量的提前控制,基于对角矩阵解耦方法可缓解燃料电池空气系统的耦合,以上方法可进一步提高燃料电池空气系统的稳定性和系统使用寿命。
52、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
本文地址:https://www.jishuxx.com/zhuanli/20241015/316174.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表