马达控制装置的制作方法
- 国知局
- 2024-10-21 14:59:11
本发明涉及驱动控制伺服马达的马达控制装置。
背景技术:
1、以往,已知有对具有移动体的致动器进行控制的致动器控制装置(例如,参照专利文献1)。专利文献1中记载的致动器控制装置具备:电流检测装置,其检测在致动器内的马达中流动的电流值;以及碰撞检测装置,其基于由电流检测装置检测到的电流值来检测移动体的碰撞。在该致动器控制装置中,电流检测装置检测在从马达的加速结束后到马达的减速开始前的期间流过马达的电流值,碰撞检测装置在该电流值超过规定阈值的情况下检测出移动体的碰撞。即,在该致动器控制装置中,在流过马达的电流值变大的马达的加减速时,不检测移动体的碰撞。因此,在该致动器控制装置中,能够抑制移动体的碰撞的误检测。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2014-87235号公报
技术实现思路
1、在专利文献1所记载的致动器控制装置中,由于在流过马达的电流值变大的马达的加减速时未检测移动体的碰撞,因此能够抑制移动体的碰撞的误检测。另一方面,在通过由专利文献1所记载的致动器控制装置控制的致动器的动力而动作的动作对象物中,也有在驱动中的马达减速而即将停止之前(即,动作对象物即将停止之前)与障碍物碰撞的可能性。但是,在专利文献1所记载的致动器控制装置中,由于在马达减速时无法检测动作对象物的碰撞,因此在马达即将停止之前无法检测动作对象物的碰撞。
2、因此,本发明的课题在于提供一种马达控制装置,即使能够抑制通过伺服马达的动力而动作的动作对象物的碰撞的误检测,也能够在伺服马达即将停止之前适当地检测动作对象物的碰撞。
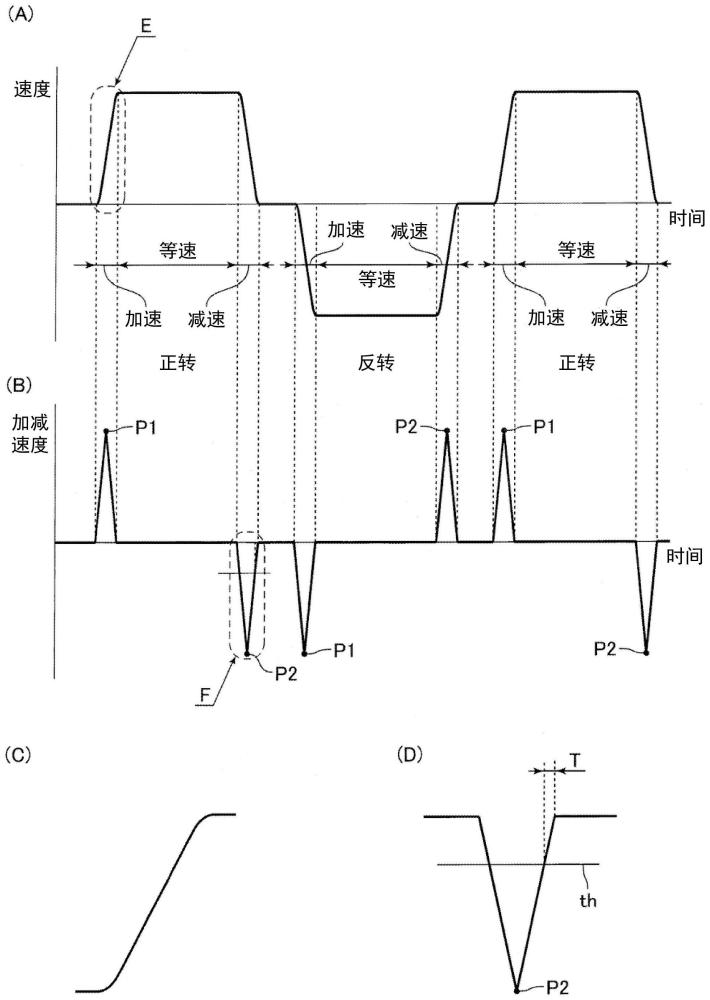
3、为了解决上述课题,本发明的马达控制装置驱动控制伺服马达,其中,具备碰撞检测功能,该碰撞检测功能检测通过伺服马达的动力而动作的动作对象物与障碍物碰撞的情况,在驱动中的伺服马达开始减速,伺服马达的减速度的绝对值达到从增加转为减少的峰值后,在到伺服马达停止为止的期间的规定期间内,成为能够检测动作对象物与障碍物碰撞的情况的能够检测碰撞状态。
4、本发明的马达控制装置在驱动中的伺服马达开始减速,伺服马达的减速度的绝对值达到从增加转为减少的峰值后,在到伺服马达停止为止的期间的规定期间内成为能够检测碰撞状态。因此,在本发明中,能够在伺服马达即将停止之前检测动作对象物的碰撞。另外,本发明的马达控制装置在伺服马达的减速度的绝对值达到峰值后,在除了到伺服马达停止为止的期间的规定期间以外的期间,不成为能够检测碰撞状态,因此,能够缩短马达控制装置成为能够检测碰撞状态的期间。因此,在本发明中,能够抑制动作对象物的碰撞的误检测。
5、在此,例如,在基于位置偏差或对伺服马达的转矩指令值来检测动作对象物的碰撞的情况下,若是在伺服马达的减速度的绝对值达到峰值之后,则能够减小动作对象物正常动作时的伺服马达的位置偏差或转矩指令值,因此,能够将为了检测动作对象物已碰撞的情况而对位置偏差或转矩指令值设定的阈值降低到不会发生动作对象物的碰撞的误检测的程度,其中,上述位置偏差是基于用于检测伺服马达的旋转位置的编码器的检测结果的伺服马达的旋转位置与基于来自上位装置的控制指令的伺服马达的旋转位置之差。
6、本发明的马达控制装置在伺服马达的减速度的绝对值达到峰值后,在到伺服马达停止为止的期间的规定期间内成为能够检测碰撞状态,因此,在本发明中,例如,能够将为了检测动作对象物碰撞的情况而对位置偏差或转矩指令值设定的阈值降低到不发生动作对象物的碰撞的误检测的程度。因此,在本发明中,能够例如基于位置偏差或转矩指令值适当地检测在伺服马达即将停止之前发生了动作对象物的碰撞的情况。即,在本发明中,即使能够抑制通过伺服马达的动力而动作的动作对象物的碰撞的误检测,也能够在伺服马达即将停止之前适当地检测动作对象物的碰撞。
7、另外,为了解决上述课题,本发明的马达控制装置对伺服马达进行驱动控制,其中,具备碰撞检测功能,该碰撞检测功能检测通过伺服马达的动力而动作的动作对象物与障碍物碰撞的情况,在驱动中的伺服马达的驱动方向成为预先设定的方向时,并且在驱动中的伺服马达开始减速,伺服马达的减速度的绝对值达到从增加转变为减少的峰值后,在到伺服马达停止为止的期间的规定期间内,成为能够检测动作对象物与障碍物碰撞的情况的能够检测碰撞状态。
8、本发明的马达控制装置在驱动中的伺服马达的驱动方向成为预先设定的方向时,并且在驱动中的伺服马达开始减速,伺服马达的减速度的绝对值达到从增加转为减少的峰值后,在到伺服马达停止为止的期间的规定期间内成为能够检测碰撞状态。因此,在本发明中,能够在伺服马达即将停止之前检测动作对象物的碰撞。另外,本发明的马达控制装置在伺服马达的驱动方向成为与设定的方向相反的方向时,不成为能够检测碰撞状态,并且,即使在伺服马达的驱动方向成为设定的方向时,在伺服马达的减速度的绝对值达到峰值后,在除了到伺服马达停止为止的期间的规定期间以外的期间,也不成为能够检测碰撞状态,因此,能够缩短马达控制装置成为能够检测碰撞状态的期间。因此,在本发明中,能够抑制动作对象物的碰撞的误检测。
9、另外,本发明的马达控制装置在驱动中的伺服马达的驱动方向成为预先设定的方向时,并且在伺服马达的减速度的绝对值达到峰值后,在到伺服马达停止为止的期间的规定期间内成为能够检测碰撞状态,因此,如上所述,例如,能够将为了检测动作对象物碰撞的情况而对位置偏差、转矩指令值设定的阈值降低到不发生动作对象物的碰撞的误检测的程度,其结果是,能够基于位置偏差、转矩指令值适当地检测在伺服马达即将停止之前发生了动作对象物的碰撞的情况。即,在本发明中,即使能够抑制通过伺服马达的动力而动作的动作对象物的碰撞的误检测,也能够在伺服马达即将停止之前适当地检测动作对象物的碰撞。
10、在本发明中,优选的是,马达控制装置在伺服马达的减速度的绝对值达到峰值后,从达到小于峰值的一半的规定值开始,到伺服马达停止为止,成为能够检测碰撞状态。若是伺服马达的减速度的绝对值成为小于峰值的一半的规定值之后,则例如能够进一步减小动作对象物正常动作时的位置偏差、转矩指令值,因此,若这样构成,则能够进一步降低为了检测动作对象物碰撞的情况而对位置偏差、转矩指令值设定的阈值。因此,能够例如基于位置偏差或转矩指令值更适当地检测在伺服马达即将停止之前发生了动作对象物的碰撞的情况。另外,若这样构成,则能够进一步缩短马达控制装置成为能够检测碰撞状态的期间,因此,能够有效地抑制动作对象物的碰撞的误检测。
11、在本发明中,马达控制装置例如基于来自上位装置的控制指令,或者基于用于检测伺服马达的旋转位置的编码器的检测结果,计算伺服马达的减速度。
12、在本发明中,马达控制装置在成为能够检测碰撞状态时,例如监视位置偏差和对伺服马达的转矩指令值中的至少任一方,其中,上述位置偏差是基于用于检测伺服马达的旋转位置的编码器的检测结果的伺服马达的旋转位置与基于来自上位装置的控制指令的伺服马达的旋转位置之差。
13、如上所述,在本发明的马达控制装置中,即使能够抑制通过伺服马达的动力而动作的动作对象物的碰撞的误检测,也能够在伺服马达即将停止之前适当地检测动作对象物的碰撞。
本文地址:https://www.jishuxx.com/zhuanli/20241021/320075.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表