基于场景识别的8K智能慢直播方法及系统与流程
- 国知局
- 2024-10-21 15:10:39
本发明涉及图像识别,特别是基于场景识别的8k智能慢直播方法及系统。
背景技术:
1、慢直播指借助直播设备对实景进行超长时间的实时记录并原生态呈现的一种直播形态。慢直播一般没有主持人,依靠一个摄像头,事件的传播与发生同步进行,不带镜头快剪、编辑、音乐渲染等制作痕迹,更没有绚丽的镜头切换以及精美的后期制作,只用固定机位拍摄来更加真实地展现事件现场,这让观看者的参与感以及沉浸式的体验更加真实。
2、从直播环境来看,慢直播摄像机要面对的拍摄场景极其多样和复杂,从高原到山地、从森林到海岛、有室内也有室外、从白天到黑夜,同一个地点不同时间的景色也不尽相同。
3、从被拍摄目标来看,慢直播摄像可能拍摄的是人物、花草数目、城市高楼、海岸线、特殊地貌、文物古迹等。
4、从光照条件来看,慢直播摄像机需要在雨天、阴天、晴天、顺光、逆光、室内灯光、清晨、黄昏、正午、傍晚、夜间等场景下工作。
5、基于此,本发明提出一种基于场景识别的8k智能慢直播方法及系统,解决了面对不同场景的慢直播时摄像机远程调整参数的问题。
技术实现思路
1、本发明的目的在于克服现有技术的缺点,提供一种基于场景识别的8k智能慢直播方法及系统,解决了面对不同场景、不同时间段进行慢直播时摄像参数的远程自动调整问题。
2、本发明的目的通过以下技术方案来实现:基于场景识别的8k智能慢直播方法,
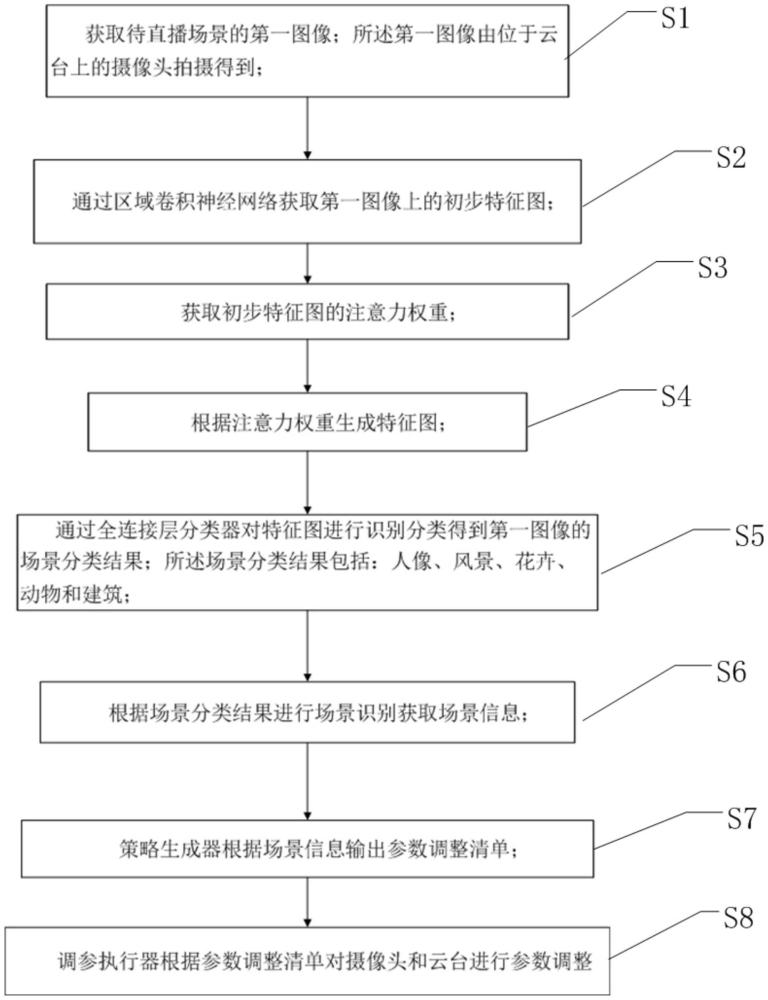
3、s1、获取待直播场景的第一图像;所述第一图像由位于云台上的摄像头拍摄得到;
4、s2、通过区域卷积神经网络获取第一图像上的初步特征图;
5、s3、获取初步特征图的注意力权重;
6、s4、根据注意力权重生成特征图;
7、s5、通过全连接层分类器对特征图进行识别分类得到第一图像的场景分类结果;所述场景分类结果包括:人像、风景、花卉、动物和建筑;
8、s6、根据场景分类结果进行场景识别获取场景信息;
9、s7、策略生成器根据场景信息输出参数调整清单;
10、s8、调参执行器根据参数调整清单对摄像头和云台进行参数调整。
11、进一步地,所述获取初步特征图的注意力权重包括:
12、s301、获取初步特征图的通道注意力权重矩阵;
13、s302、获取初步特征图的空间注意力权重矩阵;
14、s303、通过对通道注意力权重矩阵和空间注意力权重矩阵进行求和操作得到注意力权重。
15、进一步地,所述获取初步特征图的通道注意力权重矩阵包括:
16、s311、对初步特征图进行空间维度全局最大池化,得到第一特征图;对初步特征图进行空间维度全局平均池化,得到第二特征图;
17、s312、将第一特征图输入多层感知神经网络,得到第一mlp特征图;
18、s313、将第一mlp特征图和第二mlp特征图进行叠加,然后通过sigmoid激活函数进行映射获得通道注意力权重矩阵。
19、进一步地,所述获取初步特征图的空间注意力权重矩阵包括:
20、s321、对初步特征图进行通道维度全局最大池化,得到第三特征图;对初步特征图进行通道维度全局平均池化,得到第四特征图;
21、s322、通过通道拼接第三特征图和第四特征图得到第五特征图;
22、s323、对第五特征图进行卷积操作得到卷积特征图;
23、s324、通过sigmoid激活函数对卷积特征图进行映射得到空间注意力矩阵。
24、进一步地,所述策略生成器根据场景信息输出参数调整清单;
25、步骤s701、根据场景信息进行图像效果评价得分计算,获取第一评分;所述场景信息包括摄像参数和点位信息;
26、步骤s702、根据第一评分获取点位排名表;
27、步骤s703、判断点位排名表的第一名点位与场景信息中的点位是否相同;
28、若相同,则保持点位排名表不变,进入步骤s704;
29、若不相同,则保留第一名点位,进入步骤s704;
30、步骤s704、摄像头通过环境自适应调节算法,根据摄像参数获取第二摄像参数,
31、步骤s705、将第二摄像参数和点位输入到最优整点策略中获得策略清单;
32、步骤s707、判断当前时间是否到达下一刻整点时间;
33、若未到达下一刻整点时间,此时策略清单即参数调整清单,进入步骤s809;
34、若到达了下一刻整点时间,则进行点位调整;
35、步骤s708、根据点位调整生成第二点位排名表,通过第二摄像参数和第二点位排名表生成参数调整清单;
36、步骤s709:输出参数调整清单到调参执行器,然后返回步骤s801;
37、步骤s7010:输出参数调整清单到调参执行器。
38、进一步地,所述摄像头通过环境自适应调节算法,根据摄像参数获取第二摄像参数包括:
39、步骤s7051、对摄像参数中参数的值进行加法操作得到第一参数;
40、步骤s7052、根据第一参数和点位排名表计算效果得分评价,获取第二评分;
41、步骤s7053、将第二评分和第一评分进行大小比较;
42、若第二评分<第一评分,则进入步骤s7054;
43、若第二评分>第一评分,将第一评分的值替换第二评分的值,然后进入步骤s7051;
44、步骤s7054、对摄像参数中参数的值进行减法操作得到第二参数;
45、步骤s7055、根据第二参数和点位排名表计算效果得分评价,获取第三评分;
46、步骤s7056、将第三评分和第一评分进行大小比较;
47、若第三评分<第一评分,则进入进入步骤s7051;
48、若第三评分>第一评分,将第一评分的值替换第三评分的值,则进入步骤s7054;
49、重复步骤步骤s7051~步骤s7056直至不能进行加减操作,得出最高得分对应的参数,该参数即为第二摄像参数。
50、本发明还提供一种基于场景识别的8k智能慢直播系统,包括:场景识别模块、智能调参模块和执行调参模块;
51、所述场景识别模块,用于获取当前场景图像,并识别当前场景信息;
52、所述智能调参模块,用于根据当前场景信息,预测未来场景信息,根据未来场景信息生成调参列表;
53、所述执行调参模块,用于根据调参列表执行调参参数。
54、进一步地,所述场景识别模块包括:特征提取模块、注意力模块、特征图生成模块、分类模块;
55、所述特征提取模块,采用区域卷积神经网络获取场景图像的初步特征;
56、所述注意力模块,用于根据初步特征获取注意力权重矩阵;
57、所述特征图生成模块,用于根据注意力权重矩阵生成特征图;
58、所述分类模块,用于对特征图进行分类。
59、进一步地,所述注意力模块包括通道注意力模块和空间注意力模块;
60、通道注意力模块,用于获取初步特征图的通道注意力矩阵;
61、空间注意力模块,用于获取初步特征图的空间注意力矩阵。
62、进一步地,所述智能调参模块包括:
63、成像评价模块,用于对当前图像进效果得分评价;
64、对比排名模块,根据当前点位评分进行排名,并与标准点位排名得分进行比对;
65、参数微调模块,用于根据对比结果进行参数调整,并输出调整策略清单。
66、本发明具有以下优点:
67、(1)本发明通过获取通道注意力矩阵和空间注意力矩阵计算得到注意力权重,通过注意力权重提高信息处理的效率:注意力矩阵通过计算注意力权重来实现对输入图像中不同位置的关注程度,帮助处理图像时对特征提取的自动学习和识别关键区域,从而减少对冗余信息的处理,提高整体的信息处理效率。
68、提升图像处理的性能:通过使用注意力矩阵,图像处理算法可以更加专注于图像中的关键区域,忽略或降低对次要区域的关注,从而提高算法的性能和准确性。例如,在目标检测任务中,注意力矩阵可以帮助模型更准确地定位目标并提取其特征,从而提高检测精度。
69、(2)本发明提供设置策略调整器获取新的参数和点位调整,使得摄像头可以跟随时间和场景变换适应性调整摄像参数从而获取更清晰的图像。
本文地址:https://www.jishuxx.com/zhuanli/20241021/320747.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表