仿飞鱼可变形跨介质矢量飞行器
- 国知局
- 2024-10-21 15:22:37
本发明属于工程仿生学和机械设计制造,涉及仿飞鱼可变形跨介质矢量飞行器。
背景技术:
1、仿飞鱼跨介质飞行器具备空中飞行的高机动性与水下游弋的高隐蔽性,其水空跨域运动能力与仿生外形能够显著拓展常规飞行器的应用场景,可用于空中、水面、水下多域抵近侦察、实施突防攻击、反潜打击与协同作战等方面。
2、国内外对仿飞鱼跨介质飞行器在侦察与打击方面开展了较多研究。中国专利(申请号202210722103.3;专利名称:一种适用于仿生飞鱼动力学研究的水下弹射实验装置;公开号:cn 115183987 a;公开日:2022.10.14)公开了一种适用于仿生飞鱼动力学研究的水下弹射实验装置,仿生飞鱼水下低速航行时可采用尾鳍摆动推进,高速航行可采用飞鱼主体两侧的涡轮推进器提供动力,搭配形状可变的胸鳍来改变攻角,实现仿生飞鱼在水域和空中跨介质飞行。然而现有的跨介质飞行器机动性较低,在面对突发情况时难以实现快速,高效的对飞行器进行精确控制,且现有飞行器仿生变形能力不足,难以满足水空两相的航行特点。
技术实现思路
1、本发明的目的是提供仿飞鱼可变形跨介质矢量飞行器,该飞行器头部可变形,实现全周向矢量推进,从而可以极大地提高飞行器面对突发情况的机动特性,同时还提高了飞行效率。
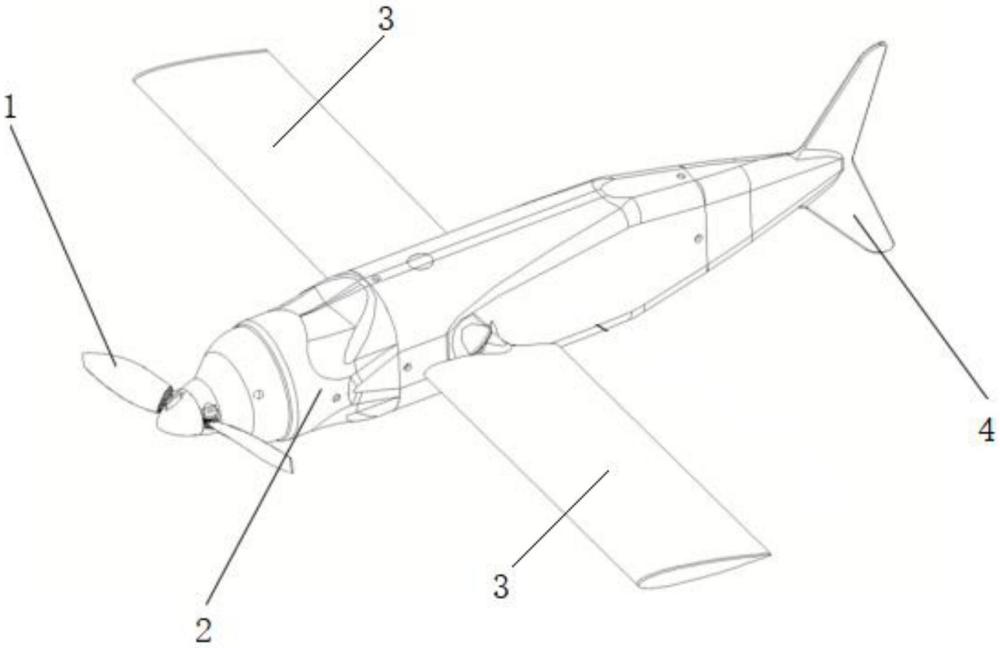
2、本发明所采用的技术方案是,仿飞鱼可变形跨介质矢量飞行器,包括跨介质飞行器本体,跨介质飞行器本体的头部设有矢量推进机构,矢量推进机构上连接有前置螺旋桨,跨介质飞行器本体的相对两侧分别设有空间折展变形翼,跨介质飞行器本体的尾部设有固定尾翼。
3、本发明的特点还在于:
4、矢量推进机构包含球形外壳,球形外壳内安装有电机座,电机座的一端中心处通过螺栓固定连接有电机,电机座的另一端中心处依次连接有万向节转轴、偏航球形结构和俯仰球形结构,偏航球形结构与偏航驱动臂连接,偏航驱动臂与偏航控制舵机连接;俯仰球形结构与俯仰驱动臂连接,俯仰驱动臂与俯仰控制舵机连接;
5、偏航控制舵机和俯仰控制舵机均安装在固定基座内。
6、通过偏航球形结构与偏航驱动臂及偏航控制舵机的配合、通过俯仰球形结构与俯仰驱动臂及俯仰控制舵机的配合,使球形外壳和固定基座形成了球面副。
7、万向节转轴通过销钉与万向节连接,固定基座通过销钉与万向节相连接,使万向节转轴可以与万向节形成转动副,万向节同时与固定基座形成转动副。
8、俯仰驱动臂上设有条形滑槽b,偏航驱动臂上设有条形滑槽a,偏航驱动臂与偏航球形结构之间、俯仰驱动臂与俯仰球形结构之间均形成球槽副。
9、空间折展变形翼包括机翼舱,机翼舱的外部相对两侧分别设有机翼a和机翼b,机翼a、机翼b分别与机翼舵形成空间转动副。
10、机翼舱与固定基座连接。
11、本发明的有益效果如下:
12、1.飞行器搭载传感器,进行水下、水面、空中多域战场环境情报侦察;
13、2.在执行远距离水域或多个水域连续水下任务时,可升空高速飞行至目标水域后,进入水下收集环境数据或执行情报侦察,再出水升空传回数据;
14、3.仿飞鱼跨介质飞行器由运载机、潜艇、舰艇输送到敌方基地一定距离海域并大量空投释放,接着贴近海面飞行到封闭海域后潜入水中,利用仿生外形的隐蔽性对目标进行抵近侦察或攻击。
技术特征:1.仿飞鱼可变形跨介质矢量飞行器,包括跨介质飞行器本体,其特征在于:所述跨介质飞行器本体的头部设有矢量推进机构(2),矢量推进机构(2)上连接有前置螺旋桨(1),所述跨介质飞行器本体的相对两侧分别设有空间折展变形翼(3),所述跨介质飞行器本体的尾部设有固定尾翼(4)。
2.根据权利要求1所述的仿飞鱼可变形跨介质矢量飞行器,其特征在于:所述矢量推进机构(2)包含球形外壳(2-1),球形外壳(2-1)内安装有电机座(2-3),电机座(2-3)的一端中心处通过螺栓固定连接有电机(2-9),电机座(2-3)的另一端中心处依次连接有万向节转轴(2-4)、偏航球形结构(2-5)和俯仰球形结构(2-6),偏航球形结构(2-5)与偏航驱动臂(2-8)连接,偏航驱动臂(2-8)与偏航控制舵机(2-13)连接;俯仰球形结构(2-6)与俯仰驱动臂(2-7)连接,俯仰驱动臂(2-7)与俯仰控制舵机(2-12)连接;偏航控制舵机(2-13)和俯仰控制舵机(2-12)均安装在固定基座(2-2)内。
3.根据权利要求2所述的仿飞鱼可变形跨介质矢量飞行器,其特征在于:通过所述偏航球形结构(2-5)与偏航驱动臂(2-8)及偏航控制舵机(2-13)的配合、通过俯仰球形结构(2-6)与俯仰驱动臂(2-7)及俯仰控制舵机(2-12)的配合,使球形外壳(2-1)和固定基座(2-2)形成了球面副。
4.根据权利要求2所述的仿飞鱼可变形跨介质矢量飞行器,其特征在于:所述万向节转轴(2-4)通过销钉与万向节(2-11)连接,固定基座(2-2)通过销钉与万向节(2-11)相连接,使万向节转轴(2-4)可以与万向节(2-11)形成转动副,万向节(2-11)同时与固定基座(2-2)形成转动副。
5.根据权利要求2所述的仿飞鱼可变形跨介质矢量飞行器,其特征在于:所述俯仰驱动臂(2-7)上设有条形滑槽b(2-17),所述偏航驱动臂(2-8)上设有条形滑槽a(2-16),偏航驱动臂(2-8)与偏航球形结构(2-5)之间、俯仰驱动臂(2-7)与俯仰球形结构(2-6)之间均形成球槽副。
6.根据权利要求2所述的仿飞鱼可变形跨介质矢量飞行器,其特征在于:所述空间折展变形翼(3)包括机翼舱(3-5),机翼舱(3-5)的外部相对两侧分别设有机翼a(3-1)和机翼b(3-4),机翼a(3-1)、机翼b(3-4)分别与机翼舵(3-5)形成空间转动副。
技术总结本发明公开了仿飞鱼可变形跨介质矢量飞行器,包括跨介质飞行器本体,跨介质飞行器本体的头部设有矢量推进机构,矢量推进机构上连接有前置螺旋桨,跨介质飞行器本体的相对两侧分别设有空间折展变形翼,跨介质飞行器本体的尾部设有固定尾翼。本发明飞行器头部可以转动,实现全周向矢量推进,且两侧机翼可以独立或同时进行空间折展变形,从而可以极大地提高飞行器面对突发情况的机动特性,同时还提高了飞行效率。技术研发人员:刘彦伟,李江超,李博文,王贤哲,李鹏阳,李淑娟受保护的技术使用者:西安理工大学技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/321368.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表