一种摩托车坡道驻车辅助控制系统及其控制方法与流程
- 国知局
- 2024-11-06 14:33:07
本发明涉及摩托车控制,具体为一种摩托车坡道驻车辅助控制系统及其控制方法。
背景技术:
1、摩托车是一种轻便、灵活的两轮或三轮车交通工具,通常由汽油发动机驱动,并通过手把操纵前轮转向。摩托车的设计允许它在城市街道、乡村道路以及特定的越野环境中快速行驶。除了作为个人交通工具外,摩托车也广泛用于巡逻、客货运输和体育运动等领域。
2、坡道停车过程中,摩托车在接近停车点时,先使用刹车控制车速,并逐渐降低速度。当车速较低时,使用离合器来缓慢释放油门,并将动力传递给后轮。然后再逐渐完全松开离合器,以确保摩托车能够稳定地停在坡上。在停车过程中,保持身体的重心和摩托车的重心一致,并尽量保持直立的姿势。启动时,确保车轮与坡度的垂直角度,以免摩托车在坡上倾斜。摩托车在半坡起步时,观察前轮至关重要。当前轮中轴中心点与黄色实心线对齐时,是起步的信号。踩下离合,挂上一档,适当加大油门,保持稳定的同时逐渐松离合,直至车子开始前行。迅速松开半联动,稳定离合,同时抬起刹车,随着车辆上至坡顶,油门和离合都要完全松开。
3、传统二轮摩托车在坡道上驻车以及从坡道起步时,骑手需要同时控制刹车和油门,防止车辆后溜或突然前冲,这对许多骑手来说操作非常不方便,对经验不足的骑手更是一种挑战,并且存在较大的安全隐患。
技术实现思路
1、针对现有技术的不足,本发明提供了一种摩托车坡道驻车辅助控制系统及其控制方法,通过系统控制,可防止车辆在坡道上后溜,减少骑手误操作导致溜坡事故风险,可使骑手在坡道上平稳起步,避免突然前冲风险,降低骑手坡道起步操作难度,提高驾驶的安全性和便利性。
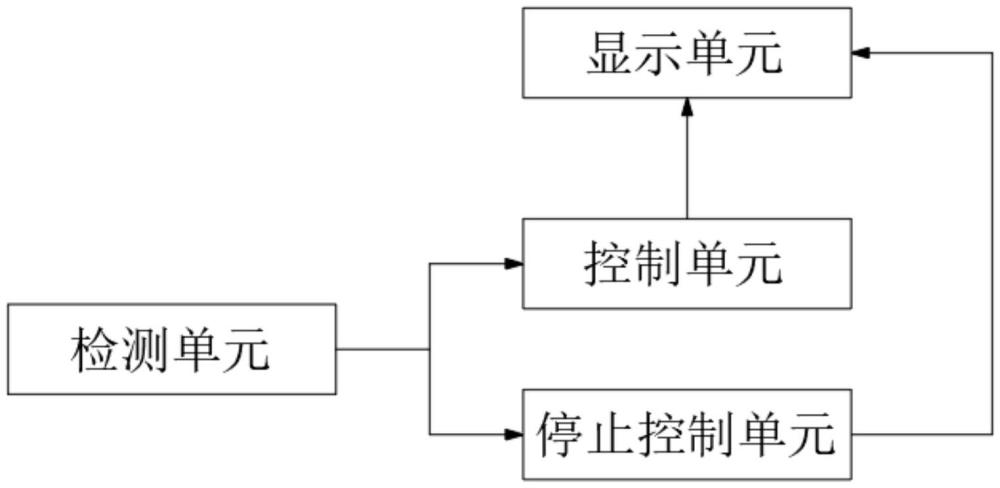
2、为实现上述目的,本发明采取的技术方案为:一种摩托车坡道驻车辅助控制系统,包括检测单元,用于对车辆所处位置及状态信息进行检测;
3、控制单元,所述检测单元的输出端与控制单元的输入端连接,用于接收检测单元的检测信息,并基于接收的检测信息对车辆进行驻坡或溜坡换向控制动作;
4、停止控制单元,所述检测单元的另一输出端与停止控制单元的输入端连接,用于在驻坡完成后或没有驻坡需求后停止控制单元的控制动作;
5、显示单元,所述控制单元、停止控制单元的输出端与显示单元的控制端相连接,用于在车辆进入或退出控制阶段时显示系统状态。
6、优选的,所述检测单元用于在接收驻坡指令时先检测摩托车是否处于静止状态、再对摩托车的所处位置进行检测。
7、优选的,所述停止控制单元在接收退出指令基于检测单元提供的信息判断是否满足退出条件并将车辆状态恢复为控制前状态。
8、优选的,所述退出条件为摩托车是否触发熄火模式、是否达到驻坡时间、是否开始坡道起步、是否达到降载保护温度。
9、本发明还提供一种摩托车坡道驻车辅助控制方法,包括如下步骤:
10、s1、检测单元接收到驻坡指令,然后检测摩托车是否处于静止状态,若处于静止状态则进入步骤s2,若未处于静止状态则进入步骤s6;
11、s2、检测单元对处于静止状态的摩托车的所处位置进行检测:骑行者捏住刹车一段时间后松开刹车并感受摩托车是否有后退趋势,如果有则说明摩托车处于坡面位置,然后进入步骤s3,没有后退趋势则说明摩托车处于平面位置直接进入步骤s6;
12、s3、检测单元对摩托车温度是否在保护温度范围内进行检测,若在保护范围内则进入步骤s4,若不在保护范围内则进入步骤s6;
13、s4、由控制单元对摩托车进行控制,使摩托车进入驻坡或者溜坡换向模式,并实时上传给显示单元;
14、s5、停止控制单元在接收到退出驻坡指令,判断摩托车是否满足退出条件,满足退出条件则进入步骤s6,并将满足退出条件的摩托车状态恢复为控制前状态并将退出状态实时上传给显示单元,不满足退出条件则回到步骤s4;
15、s6、收到驻坡指令的摩托车,退出驻坡,开始正常骑行;未收到驻坡指令的摩托车正常骑行。
16、优选的,在步骤s4中摩托车温度较高时,为保护系统硬件,驻坡动作会以溜坡换向替代,作动方式为短暂驻坡后缓慢溜坡,循环往复。
17、优选的,在步骤s5中停止控制单元未接收到退出驻坡指令则回到步骤s4。
18、优选的,在步骤s5中退出条件的判断步骤如下:s5.1、判断摩托车是否触发熄火模式,若触发熄火模式则进入步骤s6,若未触发熄火模式则回到步骤s4;
19、s5.2、判断摩托车是否达到驻坡时间,若达到驻坡时间则进入步骤s6,若未达到驻坡时间则回到步骤s4;
20、s5.3、判断摩托车是否开始坡道起步,若开始坡道起步则进入步骤s6,若未开始坡道起步则回到步骤s4;
21、s5.4、判断摩托车是否达到降载保护温度,若达到降载保护温度则进入步骤s6,若未达到降载保护温度则回到步骤s4。
22、与现有技术相比,本发明提供了一种摩托车坡道驻车辅助控制系统及其控制方法,具备以下有益效果:
23、1、本发明通过检测单元、控制单元、停止控制单元和显示单元组成的控制系统对二轮摩托车坡道驻车过程进行控制,可防止车辆在坡道上后溜,减少骑手误操作导致溜坡事故风险;可使骑手在坡道上平稳起步,避免突然前冲风险,降低骑手坡道起步操作难度,提高驾驶的安全性和便利性;
24、本发明能够帮助骑手在坡道上平稳驻车以及从坡道上平稳起步,具有减少事故风险、增加驾驶安全性和便利性的优势。
技术特征:1.一种摩托车坡道驻车辅助控制系统,其特征在于:包括检测单元,用于对车辆所处位置及状态信息进行检测;
2.根据权利要求1所述的一种摩托车坡道驻车辅助控制系统,其特征在于:所述检测单元用于在接收驻坡指令时先检测摩托车是否处于静止状态、再对摩托车的所处位置进行检测。
3.根据权利要求1所述的一种摩托车坡道驻车辅助控制系统,其特征在于:所述停止控制单元在接收退出指令基于检测单元提供的信息判断是否满足退出条件并将车辆状态恢复为控制前状态。
4.根据权利要求3所述的一种摩托车坡道驻车辅助控制系统,其特征在于:所述退出条件为摩托车是否触发熄火模式、是否达到驻坡时间、是否开始坡道起步、是否达到降载保护温度。
5.权利要求1-4任意一项所述的摩托车坡道驻车辅助控制系统的控制方法,其特征在于:包括如下步骤:
6.根据权利要求5所述的一种摩托车坡道驻车辅助控制方法,其特征在于:在步骤s4中摩托车温度升高时,为保护系统硬件,驻坡动作会以溜坡换向替代,作动方式为短暂驻坡后缓慢溜坡,循环往复。
7.根据权利要求5所述的一种摩托车坡道驻车辅助控制方法,其特征在于:在步骤s5中停止控制单元未接收到退出驻坡指令则回到步骤s4。
8.根据权利要求5所述的一种摩托车坡道驻车辅助控制方法,其特征在于:在步骤s5中退出条件的判断步骤如下:s5.1、判断摩托车是否触发熄火模式,若触发熄火模式则进入步骤s6,若未触发熄火模式则回到步骤s4;
技术总结本发明公开了一种摩托车坡道驻车辅助控制系统及其控制方法,涉及摩托车控制技术领域,包括检测单元,用于对车辆所处位置及状态信息进行检测;控制单元,所述检测单元的输出端与控制单元的输入端连接,用于接收检测单元的检测信息,并基于接收的检测信息对车辆进行驻坡或溜坡换向控制动作,停止控制单元,所述检测单元的另一输出端与停止控制单元的输入端连接,用于在驻坡完成后或没有驻坡需求后停止控制单元的控制动作。本发明通过系统控制,可防止车辆在坡道上后溜,减少骑手误操作导致溜坡事故风险,可使骑手在坡道上平稳起步,避免突然前冲风险,降低骑手坡道起步操作难度,提高驾驶的安全性和便利性。技术研发人员:张加旭,明平友,姚挺受保护的技术使用者:上海易行时代新能源科技有限公司技术研发日:技术公布日:2024/11/4本文地址:https://www.jishuxx.com/zhuanli/20241106/322772.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。