具有多通信接口的下肢外骨骼控制系统及方法
- 国知局
- 2024-11-06 14:45:52
本发明属于与外骨骼设备的控制与通信系统相关的,尤其涉及一种具有多通信接口的下肢外骨骼控制系统及方法。
背景技术:
1、下肢康复机器人是一种辅助康复治疗的高端医疗设备,相较于全程人工辅助康复治疗,此类下肢外骨骼设备可以进行更长时间、更密集的训练、并可按照需要提供康复监测功能,能够很好的满足脑瘫儿童康复行业需求。而下肢外骨骼的控制系统除了需要在外骨骼这一较为复杂的系统中,保证系统的通信效率和可靠性并尽可能的减少其线路的复杂度外,往往还需要考虑到与外界的交互。现有技术中,为实现人机交互,采用的技术有:1、与外骨骼上用于采集人体运动学信息的传感器通信,以有线连接的方式,将采集运动学数据的传感器并入电机网络管理(cn202210482063)。2、连接上位机(cn202011391862)与后台服务器(cn201911142013)进行大量数据的采集与分析的需求。
2、现有技术中存在的缺陷:1、针对与外骨骼传感器采用有线连接方式的交互,一旦传感器数量较多将极大增加了外骨骼设备通信线路的复杂性,也会使得传感设备不易拆装且实时性差。2、针对传输数据到上位机和服务器的需求,简单的使用有线传输往往会受限于传输距离、使用场景,无法推广与患者日常生活中。
技术实现思路
1、本发明的目的在于提供一种具有多通信接口的下肢外骨骼控制系统及方法,集成了物联网模块,实现了系统内的无线通信。采用的技术方案如下:
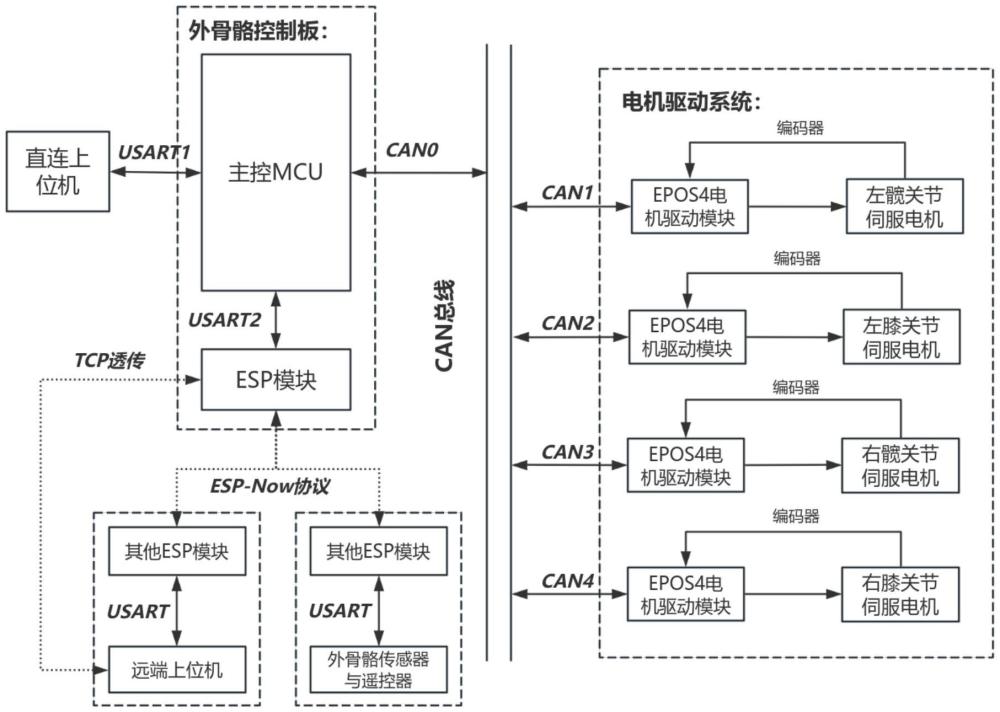
2、一种具有多通信接口的下肢外骨骼控制系统,包括:
3、外骨骼主控制器,包括主控mcu、与主控mcu连接的第一esp模块;
4、远端上位机,通过第二esp模块与所述第一esp模块连接,其用于发出串口指令,主控mcu接收指令后,输出can指令至各电机驱动系统;
5、若干个所述电机驱动系统,通过can总线与主控mcu通信;
6、外骨骼传感器,通过第三esp模块与所述第一esp模块连接,其设置于下肢外骨骼设备的表面;
7、及遥控器,其通过第四esp模块与所述第一esp模块连接。
8、优选地,所述远端上位机与第二esp模块通过有线方式通信,所述第二esp模块与所述第一esp模块通过无线方式通信。
9、优选地,所述外骨骼传感器与第三esp模块通过有线方式通信,所述第三esp模块与所述第一esp模块通过无线方式通信。
10、优选地,所述第一esp模块为esp8266模块,其使用esp-now协议与第二esp模块、第三esp模块、第四esp模块进行无线远程连接。
11、优选地,所述第二esp模块、第三esp模块、第四esp模块均为esp32模块。
12、优选地,所述主控mcu通过有线方式连接直连上位机。
13、一种具有多通信接口的下肢外骨骼控制方法,包括以下步骤:
14、步骤s1、实现第一esp模块与第二esp模块、第三esp模块、第四esp模块之间的点对点通信;
15、步骤s2、连接远端上位机和第二esp模块、外骨骼传感器和第三esp模块、遥控器和第四esp模块、第一esp模块和主控mcu;
16、步骤s3、各模块初始化;即主控mcu、电机驱动系统初始化;
17、步骤s4、创建串口-can转换模块,并存储于主控mcu;
18、所述串口-can转换模块用于将串口指令转化为can指令、can指令转化为串口指令;
19、步骤s5、远端上位机发送串口指令,依次经第二esp模块、第一esp模块传输至主控mcu,主控mcu中的串口-can转换模块将串口指令转换为can指令发送到can总线上,各电机驱动系统接收对应的can指令并执行。
20、优选地,步骤s5之后包括以下步骤:
21、步骤s6、主控mcu发出问讯can指令至can总线,can总线上的回读数据经can总线输入至串口-can转换模块,转化为串口指令后回传指远端上位机并打印。
22、优选地,步骤s5中将串口指令转换为can指令的具体步骤为:
23、s5a:规定要转换成can指令的串口通信双方特定的通信格式,包含帧头、帧尾以及发送位数;主控mcu的指令由串口通道而来,因此为串口通信双方,但要交给执行器执行要转变为can指令。
24、s5b:当主控mcu接收到串口指令后,根据帧头判断是否是正确的需要转换为can指令的格式,如果不是则要求重新发送;
25、s5c:由串口指令依次解析出传输字符串中包含的控制字、索引、子索引与传输数据;
26、s5d:将得到的数据按位重新组合,重新按照can通信的要求排列,之后装填好后发送到can总线上。
27、与现有技术相比,本发明的优点为:基于外骨骼设备缺乏交互手段尤其远程交互现状,完成了一种控制系统设计并进一步实现多种方式的连接交互。具体的:
28、1、解决了现有下肢外骨骼设备连接传感器的方式主要为有线方式连接的问题。
29、2、解决了现有技术中电机驱动系统还需连接传感器电路的问题。
30、3、解决了现有技术中数据仅存在下肢外骨骼设备中,将其导出的过程较为复杂的问题。
技术特征:1.一种具有多通信接口的下肢外骨骼控制系统,其特征在于,包括:
2.根据权利要求1所述的具有多通信接口的下肢外骨骼控制系统,其特征在于,所述远端上位机与第二esp模块通过有线方式通信,所述第二esp模块与所述第一esp模块通过无线方式通信。
3.根据权利要求1所述的具有多通信接口的下肢外骨骼控制系统,其特征在于,所述外骨骼传感器与第三esp模块通过有线方式通信,所述第三esp模块与所述第一esp模块通过无线方式通信。
4.根据权利要求1所述的具有多通信接口的下肢外骨骼控制系统,其特征在于,所述第一esp模块为esp8266模块,其使用esp-now协议与第二esp模块、第三esp模块、第四esp模块进行无线远程连接。
5.根据权利要求1所述的具有多通信接口的下肢外骨骼控制系统,其特征在于,所述第二esp模块、第三esp模块、第四esp模块均为esp32模块。
6.根据权利要求1所述的具有多通信接口的下肢外骨骼控制系统,其特征在于,所述主控mcu通过有线方式连接直连上位机。
7.一种具有多通信接口的下肢外骨骼控制方法,其特征在于,包括以下步骤:
8.根据权利要求7所述的具有多通信接口的下肢外骨骼控制方法,其特征在于,步骤s5之后包括以下步骤:
9.根据权利要求7所述的具有多通信接口的下肢外骨骼控制方法,其特征在于,步骤s5中将串口指令转换为can指令的具体步骤为:
技术总结本发明提出了一种具有多通信接口的下肢外骨骼控制系统及方法,该系统包括:外骨骼主控制器,包括主控MCU、与主控MCU连接的第一ESP模块;远端上位机,通过第二ESP模块与第一ESP模块连接,其用于发出串口指令,主控MCU接收指令后,输出CAN指令至各电机驱动系统;若干个电机驱动系统,通过CAN总线与主控MCU通信;外骨骼传感器,通过第三ESP模块与第一ESP模块连接,其设置于下肢外骨骼设备的表面;及遥控器,其通过第四ESP模块与第一ESP模块连接。本发明集成了物联网模块,实现了系统内的无线通信。技术研发人员:李慧,康子唯,李明,刘瑞林,喻洪流受保护的技术使用者:上海理工大学技术研发日:技术公布日:2024/11/4本文地址:https://www.jishuxx.com/zhuanli/20241106/323995.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表