一种四管升降压变换器高动态控制方法
- 国知局
- 2024-11-06 14:48:30
本发明涉及电能变换装置的直流-直流变换器技术,属于发电、变电或配电的,尤其涉及一种四管升降压变换器高动态控制方法。
背景技术:
1、在现代电子设备和电力系统中,电源管理的效率和可靠性至关重要。随着可再生能源、便携式电子设备、工业控制系统和电动汽车的发展,电力电子变换器需要在不同工作条件下提供稳定和高效的电能。四管升降压变换器因其可以在较宽的输入和输出电压范围内工作,且能够灵活地在升压和降压模式之间切换,成为研究和应用的热点。
2、负载切变(load step change)是指负载条件在短时间内迅速变化的现象,包括负载的突然增加或减少。这种快速的负载变化对系统的稳定性和动态响应提出了较高的要求,因为这要求变换器必须迅速调整输出电压以维持系统的稳定性。传统的控制方法在面对快速的负载切变时,往往会导致输出电压的过冲、欠冲和振荡,影响系统的性能和可靠性。负载切变在通信设备的工作模式切换场景中应用广泛。
3、现有的动态控制方法,例如基于模型预测控制的动态优化方案,该方案采用双环控制,电压外环采用pi控制,电流内环则采用所提的模型预测控制(model predictivecontrol),mpc控制可以在采样、识别电路状态后预测变换器的工作状态,然后直接调控控制量,来实现动态优化。然而其处理速度较慢,实时性差,难以应用在高频电源中;还有另外一种并行双环架构,通过采样输出电压和续流电流实现两个控制量的调节,并采用解耦控制实现动态条件下的环路稳定。但此方案需要以查找表方式确定第三个控制量,因此也限制了动态性能的提升;以及多变量定频zvs控制方法,该方法通过软硬件电路来实现控制量降阶,而后采用较慢的电压外环实现闭环控制,因此也限制了四管升降压变换器的动态响应速度。除此之外,还有滑模控制(sliding mode control),这也是一种非线性控制方案,可以实现系统的快速响应,但也存在超调问题、高频振荡和控制器参数设计等缺点。
4、综上所述,现有的各种四开关升降压变换器控制方法都有着各自的优势和局限性,并且很多控制方法主要集中在提高电源的效率和功率密度方面,对于提升高频率高效率四管升降压变换器的动态性能的控制方法研究未得到充分探讨和研究。因此需要一种能够在高动态负载变化条件下提供稳定输出的控制方法。这种高动态控制方法应具备快速响应,高稳定性,适应性强的特点。该方法对于提高电力电子系统的动态特性具有重要的意义和应用价值。这种控制方法不仅能够满足现代电源管理对快速响应和高稳定性的要求,还能广泛应用于各种高性能和高可靠性电力电子系统中。
技术实现思路
1、本发明目的在于提供一种四管升降压变换器高动态控制方法,在不同负载条件下采用不同的控制方法。当负载稳定时,系统采用线性反馈控制以实现高效率的功率传输。而在负载突变时,则切换到非线性控制,以提高系统的响应速度。这种方法旨在保持电路高效率的同时,提高系统对负载变化的响应速度,从而达到鲁棒性和动态特性的平衡,以解决背景技术提到的技术问题。
2、为解决上述技术问题,本发明的具体技术方法如下:
3、本发明公开了一种四管升降压变换器高动态控制方法,旨在通过一个控制信号产生器实现四管升降压变换器在全负载条件下的高效控制。
4、一种四管升降压变换器的高动态控制方法,使四管升降压变换器在一个工作周期内工作在四个阶段,分别是电感充电阶段,能量传输阶段,电感放电阶段,电感电流保持阶段,各个阶段的时长分别用t1、t2、t3和t4来表示;电感充电阶段:第四开关管导通、第二开关管关断,电感开始充电。反向电感电流对第一和第二开关管之间的结电容充电,使a点电压升至输入电压,第一开关管在零电压下导通,输入电压源的能量转移至电感。此阶段持续时间为t1,结束时第四开关管关闭。能量传输阶段:第四开关管关闭后,电感电流为第三和第四开关管之间的结电容充电,使b点电压升至输出电压,第三开关管在零电压下导通,输入电压源的能量直接转移到输出端口。此阶段持续时间为t2,结束时第一开关管关闭。电感放电阶段:第一开关管关闭后,第一和第二开关管之间的结电容向电感放电,使a点电压降至0,第二开关管在零电压下导通,电感中的能量传输至输出端口。此阶段持续时间为t3,结束时第三开关管关闭。电感电流保持阶段:第三开关管关闭后,第三和第四开关管之间的结电容向电感放电,使b点电压降至0,第四开关管在零电压下导通,电感两端均接地,电流保持恒定。此阶段持续时间为t4,结束时第二开关管关闭。
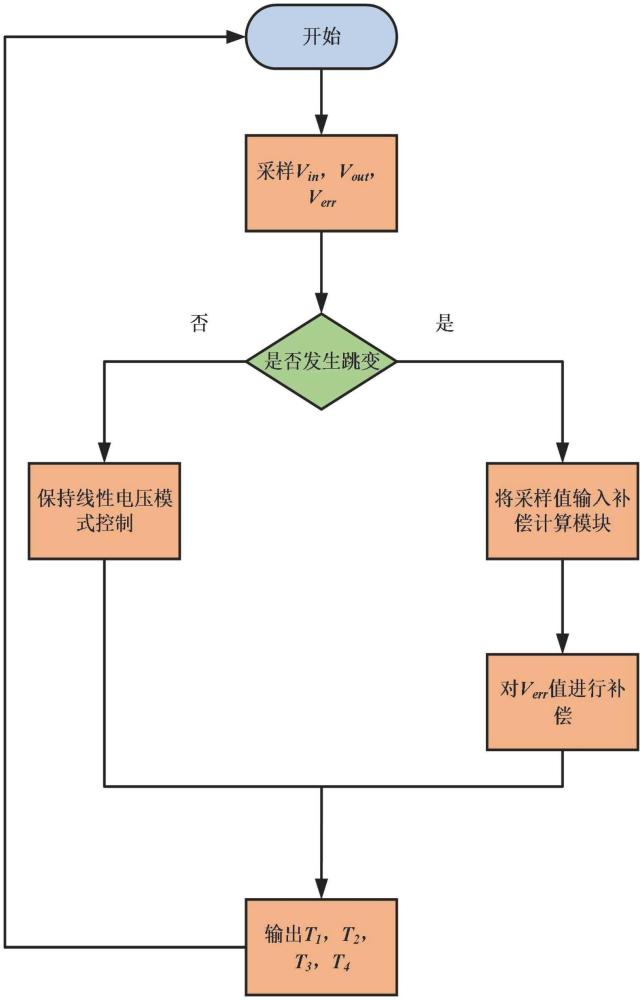
5、四管升降压变换器一个工作周期时长ts由控制量verr以及电路状态量决定以实现各个开关管的零电压导通;在输出电流大即负载大时,会实现变频控制,即若前三个阶段时间和小于给定周期时长ts时,周期时长ts大小不变;在前三个阶段时间和大于给定周期时长ts时,新的周期时长ts1为t1+t2+t3;该高动态控制方法所采用的闭环控制方法为,在系统启动、微小扰动以及稳定工作期间,采用线性控制方案,通过pi控制器根据电路状态生成误差放大信号verr值,实现系统稳定运行;在负载切换时,采用非线性瞬态控制方法,对误差放大信号verr值进行补偿,以提高变换器的动态响应性能;该非线性瞬态控制方法包括对verr值的直接补偿,当负载由重切轻时,瞬态降低verr值;当负载由轻切重时,瞬态升高verr值;在达到新的稳态之后,再切换回线性控制方案。还考虑采样延时的存在,负载跳变检测电路在输出电压瞬态过程中的不同位置检测到负载跳变时,即若在负载跳变初期检测到变化,若在负载跳变中期检测到变化,若在负载跳变中期检测到变化;不同检测时间检测负载变化,进而得到的补偿周期不同,根据检测位置对verr进行不同补偿,以优化动态性能。
6、进一步的,四管升降压变换器包括第一开关管q1、第二开关管q2、第三开关管q3、第四开关管q4和电感l:四管升降压变换器的输出端连接负载跳变检测电路用来检测负载跳变,然后在该电路之后连接控制pi控制器产生控制量verr,再根据权利要求1中提到的每个时间段和控制量verr的关系产生t1,t2时间产生电路,最后将该电路连接第一开关管q1和第二开关管q2,以上连接的三个模块统称为控制信号产生器。第一开关管q1和第二开关管q2串联构成第一桥臂,第三开关管q3和第四开关管q4串联构成第二桥臂,第一和第二桥臂中点分别用a点和b点表示,电感l连接在两桥臂的中点。输入电压源vin连接在第一开关管q1漏极与地之间,输出电压vout连接在第三开关管q3与地之间;定义电感电流为il,电感电压为vab,电感电流方向从a到b。
7、进一步的,所提出的线性和非线性结合的控制方案不仅确保了四管升降压变换器各开关管的零电压开关(zvs),还提高了系统在负载突变时的动态响应速度。其中每一段时间的大小与verr的关系如式(1)-(4)所示。
8、
9、t4=ts-t1-t2-t3 (4)
10、其中vin为输入电压,vo为输出电压,verr为误差放大值也是本发明中提到的控制量,ct为t1,t2产生电路中的电容值,rt1和rt2为t1,t2产生电路中的电阻值。
11、进一步的,首先对四段式控制的四管升降压变换器的工作过程进行了离散时域建模,用数学表达式大致地模拟了四管升降压变换器输出电压vo在负载跳变后随时间变化的趋势,方便研究控制量verr的变化对动态响应性能的影响。还可以根据所提出的数学模型计算每个变量的值,确定当下工作周期内的电感电流il,输出电压vo,以及误差放大信号verr的数值,之后再将这些计算结果迭代计算下一工作周期的输出电压和误差放大信号。在循环中可以定义负载电流io的变化规律,观察负载变化前后的vo和verr波形的变化。从而实现对四管升降压变换器动态过程的仿真实现,进而研究不同负载条件下系统的性能表现。
12、稳态点就是在负载不变的情况下每个阶段的时间和电感电流大小以及输出电压值。在负载变化之前具有一个稳态,在负载变化之后,使用非线性瞬态控制方案补偿之后,还会有一个稳态。接着分析两个稳态点之间的功率传输过程。对负载切换时各控制量增量随状态量变化的情况进行研究,通过对比直接补偿verr和pi调节vo的响应时间。最终得出在负载变化瞬态通过直接对中间控制量verr进行补偿,可以提高动态响应速度的结论。具体来说就是,在负载由重切轻时,瞬态降低verr的值有利于电路加快到达新稳态,而在负载由轻切重时,瞬态升高verr的值有利于电路加快到达新稳态。但是直接补偿的verr值大小还会影响动态性能的提升程度。直接补偿verr的瞬态控制方案中verr的最优补偿值在经过对所建数学模型的研究分析后,发现该值即为下一稳态所对应的控制量verr与上一稳态所对应的控制量verr的差值δverr。再根据所建立数学模型得出负载跳变之后的t1,t2和t3的值,依旧实现四个开关管的零电压开通。当达到新的稳态后,切换回原来的线性电压模式控制。方案在提高动态响应速度的同时也保证了电路的高效率。
13、进一步的,在实际工作过程中,由于采样延时的存在,控制器不能立刻检测到负载的变化,控制系统可能会在输出电压瞬态过程中的不同位置检测到负载跳变,在不同的位置对控制量verr进行补偿,补偿量也会有所区别。下面将从能量补偿角度计算瞬态过程对verr值的补偿,当负载由轻载切重载时,电感电流没有及时做出反应,输入的电流不满足负载电流所需,因此输出电容中的电流将需要供给负载电流,输出电容中电流减小,输出电压因此有下降的趋势。为解决这个问题,系统只有在将这部分能量补回后才能到达新的稳态。对式(5)进行数学分析,可以得到输入能量pin为一个随verr值递增的表达式,在本控制方案中verr可选的最大值为5v,为了实现在负载跳变后对输出电容值的迅速补偿,在轻载切重载的瞬态控制中,需要根据输出电容损失的能量尽可能的选择更大的verr。在不同的工况下,对verr的补偿过程不同。
14、
15、进一步的,如果在刚跳变的时间检测到,该段时间内,输出电容损失的能量较少,在该时间内输出电压最大只会降低到一个值,称之为vo_min,在一个周期内就能通过直接补偿verr值到verr_1,就可以将输出电容损失的部分能量补偿回来。verr_1的计算由式(6)给出。
16、
17、式中的verr_1为所求量,δvo为检测到负载跳变时输出电压的变化值,izvs为整个工作周期内负电感电流对应的数值。
18、进一步的,若在跳变之后的较短一段时间内检测到,在该段时间内,输出电容能量损失较多,通过式(7)所建立的数学模型,可以得到补偿的周期数n,但一般不是整数,如果直接舍去小数位或者进位,就会产生未完全补偿或补偿过量问题。因此则需要对这一段时间的数学模型进行修正,在其第一阶段将n进行取整,得到n1,补偿n1个周期后可以将控制量verr拉至能够在一个周期内将能量补回的verr值verr_2,并且得到此时的输出电压vo。在第二阶段将控制量verr_2按照式(7)所建立的数学模型计算出拉至新稳态所对应verr值,称为verr_b。
19、进一步的,如果在快要恢复稳态的阶段检测到负载发生跳变,此时电路已接近稳态值,与刚跳变的时间阶段的补偿原理相同。
20、pin_max·n=cδvo2 (8)
21、式(8)中的pin_max为控制值verr拉到最大值所对应的最大输入能量。δvo为检测到负载跳变时输出电压的变化值。
22、进一步的,通过确定不同时间点检测负载变化,再根据该时间点确定最佳补偿周期数为1或者是n1,最终确定对应的补偿值verr,以实现最优的动态响应性能。
23、本发明的一种四管升降压变换器高动态控制方法具有以下优点:
24、(1)本发明提出的四管升降压变换器高动态控制方法,是一种线性与非线性相结合的动态优化方法。以负载电流大小为控制变量,在系统稳态工作以及负载发生微小扰动时采用普通pi控制对控制量verr进行线性调控,实现变换器四个阶段时间的随之变化,输出迅速响应达到稳态。
25、(2)本发明提出的四管升降压变换器高动态控制方法,是一种线性与非线性相结合的动态优化方法。以负载电流大小为控制变量,在负载发生较大变化时采用对控制量verr进行直接补偿的非线性瞬态方案,并且考虑了采样延时的影响,进行分段补偿。实现变换器四个阶段时间的随之变化,输出随之在几个周期后达到稳态。
本文地址:https://www.jishuxx.com/zhuanli/20241106/324226.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。