一种网络化控制系统跟踪性能优化方法及装置
- 国知局
- 2024-11-06 14:49:04
本发明涉及通讯信号跟踪控制,特别是指一种网络化控制系统跟踪性能优化方法及装置。
背景技术:
1、现有技术中,例如文献1[optimal tracking performance analysis of mimocontrol systems under multiple constraints]中给出了一个离散系统模型,研究了多通讯约束下的网络化控制系统的最优跟踪性能,并将通讯约束整合到上行链路与下行链路中,在上行链路中考虑了量化器的影响,在下行链路中考虑了编解码、加性高斯白噪声以及带宽的影响。通过设计最优双自由度控制器得到了该系统的最优跟踪性能。虽然该模型考虑的网络约束较为全面,但是对物理模型的也做出了严格的限制,例如,被控对象中包含的非最小相位零点以及不稳定极点均为单根的情况,而在实际的模型当中,不稳定极点以及非最小相位零点允许有重根的情况出现。
2、例如文献2[performance limitations of networked control systems withquantization and packet dropouts]中设计了一个双自由度系统模型,并且在下行链路中考虑了均匀量化器和丢包的影响。基于频域分析方法得到了具有量化和丢包的网络控制系统的性能限制。可以发现,现有技术在该模型中,考虑的网络约束较为简单,没有考虑带宽的限制,且对被控对象的建模同样较为简单,仅考虑被控对象中的非最小相位零点和不稳定极点存在单根的情况。
3、总而言之,现有的网络化控制系统建模中,为了方便最优跟踪性能分析,将被控对象的建模为只包含单个的非最小两位零点和不稳定极点,然而,具有重复性的非最小相位零点和不稳定极点对跟踪性能的影响更具有实际意义。
技术实现思路
1、为了解决现有技术考虑的网络约束较为简单,没有考虑带宽的限制,且对被控对象的建模同样较为简单,仅考虑被控对象中的非最小相位零点和不稳定极点存在单根的情况的技术问题,本发明实施例提供了一种网络化控制系统跟踪性能优化方法及系统。所述技术方案如下:
2、一方面,提供了一种网络化控制系统跟踪性能优化方法,方法包括:
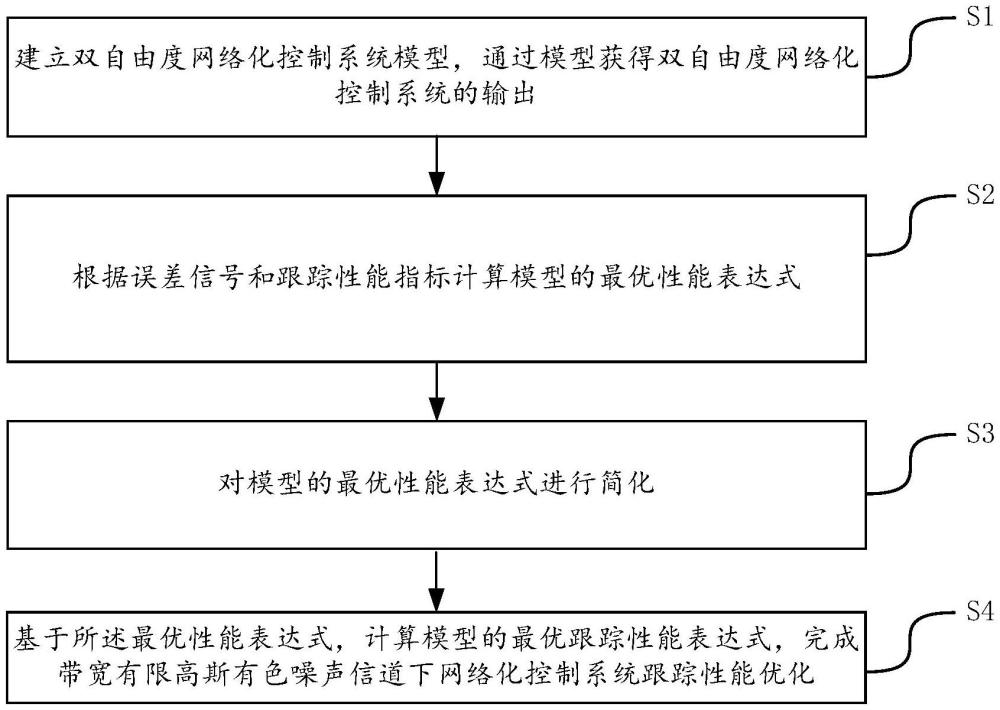
3、s1、建立双自由度网络化控制系统模型,通过模型获得双自由度网络化控制系统的输出;
4、s2、根据误差信号和跟踪性能指标计算模型的最优性能表达式;
5、s3、对模型的最优性能表达式进行简化;
6、s4、基于最优性能表达式,计算模型的最优跟踪性能表达式,完成带宽有限高斯有色噪声信道下网络化控制系统跟踪性能优化。
7、可选地,s1中,建立双自由度网络化控制系统模型,通过模型获得双自由度网络化控制系统的输出,包括:
8、构建双自由度网络化控制系统模型;其中,系统输出如下述公式(1)所示:
9、y=gfk1r-gfk2hn-gfk2(r-e) (1)
10、其中,g代表被控对象的传递函数,k1和k2分别为前馈控制器和反馈控制器,f表示带宽,h用来对加性高斯白噪声n着色,r为系统输入,n为信道中的噪声,r和n是均值为0且方差分别为和的加性高斯白噪声,e为误差信号。
11、可选地,s2中,根据误差信号和跟踪性能指标计算模型的最优性能表达式,包括:
12、根据下述公式(2)计算误差信号e:
13、e=r-y (2)
14、根据下述公式(3)计算跟踪性能指标j:
15、
16、其中,其中e{}表示期望算子;
17、基于误差信号e和跟踪性能指标j,根据下述公式(4)计算模型的最优跟踪性能的表达式:
18、
19、其中,inf表示下确界,q和表r示双自由度控制器中自由设计的两个参数,rh∞表示所有稳定的、正则的、实有理传递函数构成的集合。
20、可选地,s3,对模型的最优性能表达式进行简化,包括:
21、计算基于有理传递函数矩阵的互质分解gf、计算bezout等式以及计算双自由度控制器的youla参数化形式;
22、基于互质分解gf、bezout等式以及youla参数化形式对模型的最优性能表达式进行简化。
23、可选地,基于有理传递函数矩阵的互质分解gf,包括:
24、gf=e-τsnm-1,其中,n和m为互质分解后的两个因子,分别包含所有的非最小相位零点和不稳定极点,e-τs代表被控对象中的时延,τ为非负实数,s为自变量;
25、bezout等式xm-e-τsyn=1,其中,x,y∈rh∞;
26、双自由度控制器的youla参数化形式如下述公式(5)所示:
27、κ:={κ:k=[k1 k2]=(x-e-τsrn)-1[q y-rm],q,r∈rh∞} (5),
28、其中,κ表示所有能使得网络化控制系统稳定的控制器集合。
29、可选地,基于互质分解gf、bezout等式以及youla参数化形式对模型的最优性能表达式进行简化,包括:
30、基于互质分解gf、bezout等式以及youla参数化形式对模型的最优性能表达式进行简化,如下述公式(6)所示:
31、
32、其中,且,
33、可选地,s4中,基于最优性能表达式,计算模型的最优跟踪性能表达式,包括:
34、对和分别进行化简并选择合适的控制器参数q使1-e-τslfmnmq∈h2得到下述公式(7)和公式(8):
35、
36、基于和的计算结果得到如下述公式(9)的模型的最优跟踪性能表达式:
37、
38、另一方面,提供了一种网络化控制系统跟踪性能优化系统,该系统应用于网络化控制系统跟踪性能优化方法,该系统包括:
39、系统模型构建模块,用于建立双自由度网络化控制系统模型,通过模型获得双自由度网络化控制系统的输出;
40、最优性能表达式计算模块,用于根据误差信号和跟踪性能指标计算模型的最优性能表达式;
41、简化模块,用于对模型的最优性能表达式进行简化;
42、最优跟踪性能计算模块,用于基于最优性能表达式,计算模型的最优跟踪性能表达式,完成带宽有限高斯有色噪声信道下网络化控制系统跟踪性能优化。
43、另一方面,提供一种网络化控制系统跟踪性能优化设备,所述网络化控制系统跟踪性能优化设备包括:处理器;存储器,所述存储器上存储有计算机可读指令,所述计算机可读指令被所述处理器执行时,实现如上述网络化控制系统跟踪性能优化方法中的任一项方法。
44、另一方面,提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现上述网络化控制系统跟踪性能优化方法中的任一项方法。
45、本发明实施例提供的技术方案带来的有益效果至少包括:
46、本发明提供的方法:1.考虑的模型更为实际,被控对象的非最小相位零点以及不稳定极点允许有重根的情况出现,建立了带宽有限的加性有色高斯噪声信道下的网络化控制系统模型。
47、2.利用互质分解、全通分解和youla参数化等工具设计出了一个最优双自由度控制器,在保证系统稳定的前提下,极大地提高了该系统的跟踪性能,使得该系统输出能够更有效的跟踪参考输入。
48、3.通过频域分析方法,得到了带宽有限的加性有色高斯噪声信道下的网络控制系统跟踪性能的下确界,在现有的基础上,还给出了信道中的非最小相位零点与跟踪性能的内在联系。
本文地址:https://www.jishuxx.com/zhuanli/20241106/324282.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。