实时全局污染物浓度最小化的路径规划方法和系统
- 国知局
- 2024-11-06 14:45:39
本申请涉及机器人控制,特别是涉及一种实时全局污染物浓度最小化的路径规划方法、系统、计算机设备、存储介质和产品。
背景技术:
1、移动机器人路径规划是在一个有障碍物的有界空间内,寻找一条无碰撞最优或者近似最优路径,使机器人在最短时间内移动到目标点。现有的路径规划方法主要有:a*算法、rrt算法、概率路线图法、人工势场法(artificial potential field,apf),蚁群算法等等。其中,相对于其他复杂的优化算法,apf的计算过程相对简单,易于理解和实现。apf具有良好的局部避障能力,可以有效地使机器人避开近距离的障碍物,能够快速响应环境变化,实时调整路径,适合动态环境。但是,apf无法解决实时全局污染物浓度最小化这一问题,尤其是在面对大型空间时,一个地点的污染物浓度会在机器人离开一段时间后恢复到原本值的时候(如一个地点的污染物浓度因为靠近污染源且机器人没有返回而恢复到初始水平)。除了apf无法解决该问题,现有的其他算法也无法很好的解决该问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种实时全局污染物浓度最小化的路径规划方法、系统、计算机设备、存储介质和产品。
2、第一方面,提供一种实时全局污染物浓度最小化的路径规划方法,所述方法包括:
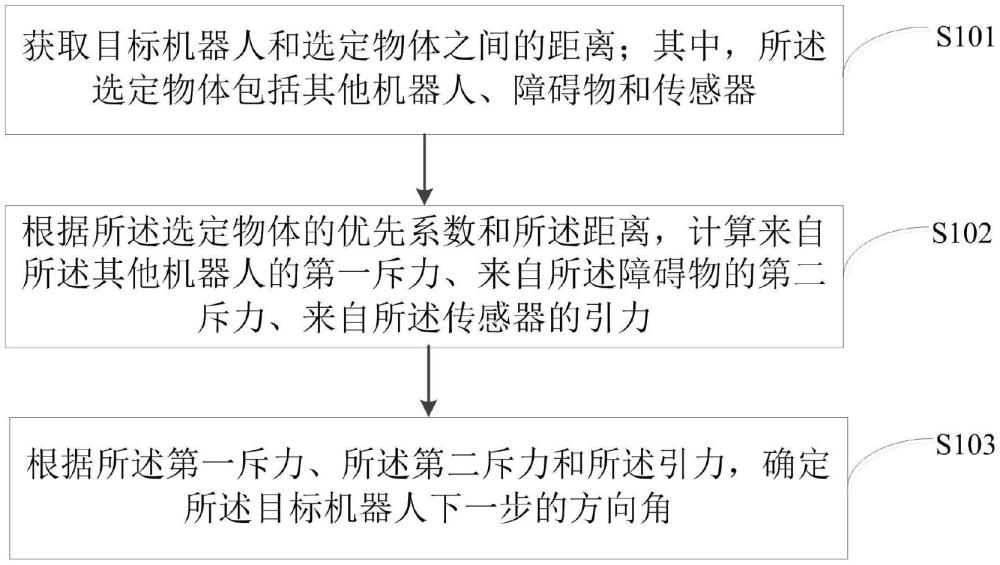
3、获取目标机器人和选定物体之间的距离;其中,所述选定物体包括其他机器人、障碍物和传感器;
4、根据所述选定物体的优先系数和所述距离,计算来自所述其他机器人的第一斥力、来自所述障碍物的第二斥力、来自所述传感器的引力;
5、根据所述第一斥力、所述第二斥力和所述引力,确定所述目标机器人下一步的方向角。
6、第二方面,提供一种实时全局污染物浓度最小化的路径规划系统,所述系统包括:
7、距离获取模块,用于获取目标机器人和选定物体之间的距离;其中,所述选定物体包括其他机器人、障碍物和传感器;
8、力计算模块,用于根据所述选定物体的优先系数和所述距离,计算来自所述其他机器人的第一斥力、来自所述障碍物的第二斥力、来自所述传感器的引力;
9、方向角确定模块,用于根据所述第一斥力、所述第二斥力和所述引力,确定所述目标机器人下一步的方向角。
10、第三方面,提供一种计算机设备,所述计算机设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的实时全局污染物浓度最小化的路径规划程序,所述实时全局污染物浓度最小化的路径规划程序被所述处理器执行时实现如第一方面所述的实时全局污染物浓度最小化的路径规划方法。
11、第四方面,提供一种计算机可读存储介质,计算机可读存储介质,所述计算机可读存储介质上存储有实时全局污染物浓度最小化的路径规划程序,所述实时全局污染物浓度最小化的路径规划程序被处理器执行时实现如第一方面所述的实时全局污染物浓度最小化的路径规划方法。
12、第五方面,提供一种计算机程序产品,所述计算机程序产品包括实时全局污染物浓度最小化的路径规划程序,所述实时全局污染物浓度最小化的路径规划程序被处理器执行时实现如第一方面所述的实时全局污染物浓度最小化的路径规划方法。
13、上述实时全局污染物浓度最小化的路径规划方法、系统、计算机设备、存储介质和产品,实时全局污染物浓度最小化的路径规划方法包括:获取目标机器人和选定物体之间的距离;其中,所述选定物体包括其他机器人、障碍物和传感器;根据所述选定物体的优先系数和所述距离,计算来自所述其他机器人的第一斥力、来自所述障碍物的第二斥力、来自所述传感器的引力;根据所述第一斥力、所述第二斥力和所述引力,确定所述目标机器人下一步的方向角。其中,根据选定物体的优先系数和距离,计算来自其他机器人的第一斥力、来自障碍物的第二斥力、来自传感器的引力。斥力使机器人避开障碍物和其他机器人,防止碰撞和路径堵塞。引力吸引机器人向传感器指示的高污染物浓度区域移动,以便进行污染物清理。此外,考虑了选定物体的优先系数,如,优先系数为正的传感器引力指导机器人前往污染物浓度高的区域,优先系数为负的斥力确保机器人避开障碍物和其他机器人,维持路径畅通。此外,通过综合考虑所有机器人和传感器的信息,实现全局范围内的优化,而非仅考虑单个机器人的局部最优。合力的方向角指导机器人选择最优路径,减少无效移动,提高清洁效率。
技术特征:1.一种实时全局污染物浓度最小化的路径规划方法,其特征在于,所述方法包括:
2.根据权利要求1所述的实时全局污染物浓度最小化的路径规划方法,其特征在于,采用下述公式计算来自所述其他机器人的第一斥力、来自所述障碍物的第二斥力、来自所述传感器的引力:
3.根据权利要求1所述的实时全局污染物浓度最小化的路径规划方法,其特征在于,所述根据所述第一斥力、所述第二斥力和所述引力,确定所述目标机器人下一步的方向角,包括:
4.根据权利要求1所述的实时全局污染物浓度最小化的路径规划方法,其特征在于,所述方法还包括:
5.根据权利要求4所述的实时全局污染物浓度最小化的路径规划方法,其特征在于,所述方法还包括:
6.根据权利要求4所述的实时全局污染物浓度最小化的路径规划方法,其特征在于,所述方法还包括:
7.一种实时全局污染物浓度最小化的路径规划系统,其特征在于,所述系统包括:
8.一种计算机设备,其特征在于,所述计算机设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的实时全局污染物浓度最小化的路径规划程序,所述实时全局污染物浓度最小化的路径规划程序被所述处理器执行时实现如权利要求1至6中任一项所述的实时全局污染物浓度最小化的路径规划方法。
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有实时全局污染物浓度最小化的路径规划程序,所述实时全局污染物浓度最小化的路径规划程序被处理器执行时实现如权利要求1至6中任一项所述的实时全局污染物浓度最小化的路径规划方法。
10.一种计算机程序产品,其特征在于,所述计算机程序产品包括实时全局污染物浓度最小化的路径规划程序,所述实时全局污染物浓度最小化的路径规划程序被处理器执行时实现如权利要求1至6中任一项所述的实时全局污染物浓度最小化的路径规划方法。
技术总结本申请涉及一种实时全局污染物浓度最小化的路径规划方法和系统,实时全局污染物浓度最小化的路径规划方法包括:获取目标机器人和选定物体之间的距离;其中,所述选定物体包括其他机器人、障碍物和传感器;根据所述选定物体的优先系数和所述距离,计算来自所述其他机器人的第一斥力、来自所述障碍物的第二斥力、来自所述传感器的引力;根据所述第一斥力、所述第二斥力和所述引力,确定所述目标机器人下一步的方向角。从而可以实现实时全局污染物浓度最小化的路径规划。技术研发人员:王者,周琦,郑烨受保护的技术使用者:香港科技大学深港协同创新研究院(深圳福田)技术研发日:技术公布日:2024/11/4本文地址:https://www.jishuxx.com/zhuanli/20241106/323974.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表