用于多个磁性微型机器人空间运动闭环控制的全局磁场发生装置
- 国知局
- 2024-11-06 15:06:13
本发明涉及可用于医疗检查和治疗的微纳机器人控制技术,特别是涉及一种用于多个磁性微型机器人空间运动闭环控制的全局磁场发生装置。
背景技术:
1、随着科技的迅速发展,微纳机器人已经成为最前沿的研究领域之一,它们在医疗、工业、科研等多个领域都有着广泛的应用前景。微纳机器人的尺寸通常在毫米级别,有的甚至可以达到纳米级别,小巧的体积使得它们能够在微观世界中进行操作,完成传统大型机器人无法完成的精细工作。例如,它们可以穿越人体中的微小血管和体腔,进行医疗检查和治疗;在微观层面进行精密制造;用其独特的结构对小颗粒物质包裹运输,实现微观层面的取样递送。
2、如何对微纳机器人实现准确的驱动传感是微纳机器人技术的研究核心,在近期研究中,光,热,声,电场,压电,生物,电磁这些物理方式被证明是可行的微纳机器人致动方案。其中,磁驱动具有较高的控制精度,并且短时间的磁场施加不会对人体产生太大危害使得磁控微纳机器人具有巨大的医学应用价值。通过平面内微线带构成阵列利用局部磁场对多个微纳机器人实现二维平面控制。然而,简单的二维运动或是单个机器人的空间运动往往难以满足实际条件下的工作需要。
3、现有磁场发生装置仅能实现全局磁场,或者局部磁场的发生,实现单个微纳机器人的空间运动控制,或者多个机器人的平面运动控制,难以实现三维空间内的局部磁场发生实现多个微纳机器人的空间运动控制,通过特定复杂算法控制的信号输入使用全局磁场控制多个微纳机器人的空间运动执行难度巨大,且随着机器人数量的增加,算法复杂程度骤增与控制可靠性降低,这将带来极大的成本增加,不利于该技术在工业,医学领域的应用,而采用微线带阵列在二维平面控制微纳机器人,难以保证微纳机器人在实际复杂工作条件下的控制,例如集群微纳机器人在人体器官中复杂管路中的运动控制采用二维微线带阵列便无法完成。
4、需要说明的是,在上述背景技术部分公开的信息仅用于对本技术的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本发明的主要目的在于解决上述背景技术中存在的问题,提供一种用于多个磁性微型机器人空间运动闭环控制的全局磁场发生装置。
2、为实现上述目的,本发明采用以下技术方案:
3、一种用于多个磁性微型机器人空间运动闭环控制的全局磁场发生装置,包括:
4、局部磁场发生装置,其通过小型线圈阵列产生局部离散磁场,独立控制阵列中每个线圈的电流大小与通断,实现空间内局部磁场的大小方向改变,以控制磁驱动微纳机器人运动;
5、局部磁场发生装置驱动平台,其连接并驱动所述局部磁场发生装置进行空间内多个自由度运动,以改变局部磁场相对于磁驱动微纳机器人的位置和方向;
6、全局磁场发生模块,其通过三轴亥姆霍兹线圈产生全局匀强磁场,并与所述局部磁场发生装置产生的局部磁场叠加而形成大小方向可控的三维空间阵列化局部磁场;
7、其中,在全局磁场和局部磁场的共同作用下,实现空间内多个磁驱动微纳机器人的运动控制。
8、进一步地,所述局部磁场发生装置包括阵列孔板,所述阵列孔板上设有多个阵列孔,每个阵列孔内设置有一个小型线圈,以形成预定的小型线圈阵列排布,所述小型线圈内设置有铁芯。
9、进一步地,所述局部磁场发生装置驱动平台为六自由度机械驱动模块,包括平台底板、六个第一万向节、六个小型电缸、六个第二万向节以及转接板,其中所述平台底板设有多个固定孔,用于定位和固定所述第一万向节的一端,所述第一万向节的另一端与所述小型电缸连接为一体,所述小型电缸包含构成套筒副的电缸驱动端和电缸轴,所述电缸轴的末端与所述第二万向节连接,所述第二万向节的另一端连接于所述转接板上,所述阵列孔板固定于所述转接板上;其中,通过控制所述六个小型电缸的进给,实现所述转接板及所述小型线圈阵列沿笛卡尔坐标系中的x、y、z轴的平移,以及绕各轴的旋转运动,从而改变局部磁场的方向和位置。
10、进一步地,所述第一万向节和所述第二万向节各自包括位于两个外侧铰链结构和连接在所述两个外侧铰链结构之间的公共铰链结构,所述第一万向节的一个外侧铰链结构安装在所述平台底板上,所述第一万向节的另一个外侧铰链结构设置在所述电缸驱动端上,所述第二万向节的一个外侧铰链结构设置在所述电缸轴的末端,所述第二万向节的另一个外侧铰链结构安装在所述转接板上。
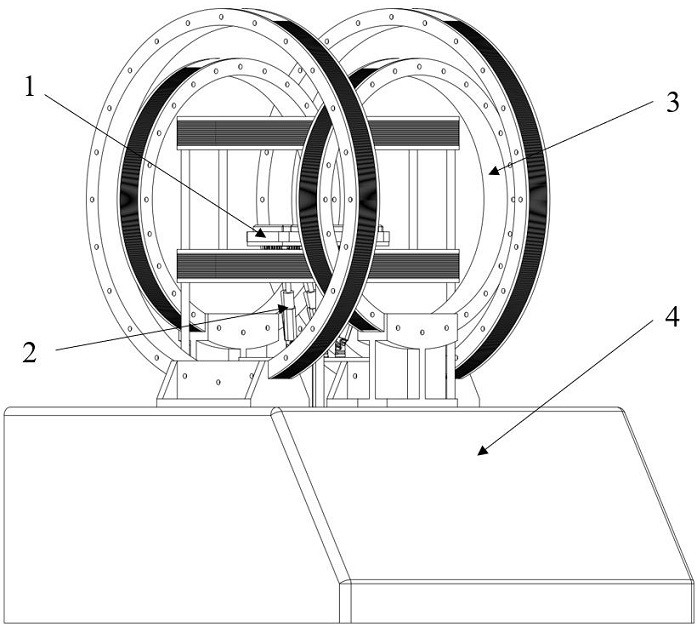
11、进一步地,所述三轴亥姆霍兹线圈包括三组轴线相交的亥姆霍兹线圈,其中两对亥姆霍兹线圈的轴线沿水平方向并相互垂直,所述两对亥姆霍兹线圈中的每对线圈面对面同轴设置,第三对亥姆霍兹线圈的轴线沿竖直方向,所述第三对亥姆霍兹线圈设置在所述两对亥姆霍兹线圈中的每对线圈之间。
12、进一步地,所述局部磁场发生装置设置于所述第三对亥姆霍兹线圈内。
13、进一步地,所述亥姆霍兹线圈包括漆包线、u形截面线圈架和线圈架支座,其中所述漆包线缠绕于所述u形截面线圈架上,所述u形截面线圈架固定在所述线圈架支座上。
14、进一步地,所述线圈架支座的顶部设置有u形弧槽,所述u形截面线圈架嵌固在所述u形弧槽中。
15、进一步地,所述u形截面线圈架的外缘和所述u形弧槽的侧壁上设置有螺钉孔,由螺钉将所述u形截面线圈架与所述u形弧槽固定。
16、进一步地,还包括机构底座,所述线圈架支座的底部设置有螺钉孔,用于通过螺钉固定在所述机构底座上。
17、在一些实施例中,小型线圈组成的阵列式局部磁场发生装置可以通过正方形阵列排列的小型线圈实现一定区域内阵列化局部离散磁场的发生,其结构包括阵列孔板,用于局部离散磁场发生的小型线圈与高磁导率材料构成的铁芯,通过该变线圈中通过的电流可以在阵列的各个节点产生相异的离散磁场,通过六自由度平台对阵列进行姿态变换以改变离散磁场相对于微纳机器人的相对位置,实现对微纳机器人所在环境局部磁场的改变。
18、六自由度机械驱动模块能实现局部磁场发生阵列的空间六自由度方向运动,改变微纳机器人环境中的局部磁场分布,其结构包括平台底板,平台底板上六孔固定六个万向节(虎克副),万向节一端固定于平台底板上,另一端与小型电缸末端连接为一体,六个小型电缸可实现小范围的直线运动,电缸轴可以在套筒中旋转,构成套筒副,六根电缸轴末端与万向节连接,万向节另一端连接于转接板上,通过对六根电缸的进给控制可以实现转接板与连于其上的局部磁场发生阵列于笛卡尔坐标系中的沿x,y,z轴的平移与绕x,y,z轴的旋转运动,实现一定范围内的局部阵列磁场方向与位置变化。转接板用于将线圈与阵列孔板整体连接于六自由度机械驱动模块上。
19、全局磁场发生模块包括三组实现微纳机器人运动空间范围内全局匀强磁场发生的亥姆霍兹线圈组及其固定连接结构,线圈由漆包铜线紧密缠绕于u形圆槽固定架中构成,两组线圈面对面同轴放置,u型槽侧面攻有m6螺纹孔,用于固定螺纹立柱,螺纹立柱为阶梯轴,两头车m6外螺纹,螺纹柱用于线圈间固定,保证线圈同轴位置精度。螺纹柱也用于将线圈及固定架固定在装置机座上。竖直方向的线圈由线圈架支座固定,其结构包括u形弧槽与带孔底面,u形弧槽上有直径6.1mm通孔与固定线圈的u形弧槽上螺纹孔相对应,通过内六角螺栓将线圈与固定架固定,再用内六角螺栓将线圈,线圈固定架,线圈架支座固定在机座上。
20、当一对正对亥姆霍兹线圈通电时,根据其通电情况可以在其工作范围产生稳态或瞬态变化的匀强磁场,当三坐标轴方向的匀强磁场叠加时,其叠加磁场也为匀强磁场,大小为三轴匀强磁场矢量和的模数,方向为矢量和方向,改变输入线圈的模拟信号可在微纳机器人运动区域形成任意方向的可变全局磁场。在由全局磁场发生模块产生全局磁场的基础上,通过改变阵列内独立线圈内电流的通断控制每个线圈所属局部磁场的强弱,则可以将全局磁场变为原先由三轴亥姆霍兹线圈产生的全局磁场与阵列中每个独立小线圈作用范围内磁场的叠加,实现空间内局域磁场的发生与控制,意味着通过全局磁场发生线圈与局部磁场发生线圈输入模拟信号的改变便可改变空间内多个微纳机器人的驱动力方向与大小,实现同时对空间中多个微纳机器人的驱动控制。
21、本发明具有如下有益效果:
22、本发明提出一种用于多个磁驱动机器人的空间运动闭环控制的全局磁场发生装置,可同时驱动控制多个磁驱动微纳机器人空间运动。本发明叠加全局磁场与单个阵列线圈的局部磁场,产生分布于空间各处的可控的局部磁场,实现分布于线圈工作空间内多处多个微纳机器人的同时运动控制,能够有效解决现有磁场发生装置难以实现多个微纳机器人空间运动集群控制的问题。
23、进一步地,局部磁场发生装置驱动平台驱动局部磁场发生装置进行空间内多个自由度运动,如六自由度运动平台与线圈阵列结合,使得线圈阵列可以在一定范围内实现六自由度的运动,以在六自由度平台行程限定的作用范围内的任意位置产生可控的空间局部磁场,并且,在驱动平台作用下,磁控阵列可以随着机器人在工作腔道内的运动实现随动,避免了固定磁场发生装置实现多个微纳机器人在大行程,复杂立体环境中控制时对机器人作用物的调整导致对机器人运动的干扰与对作用物的损害及运动环境改变,线圈可以随着机器人的运动而运动,实现空间范围内控制磁场对被控对象的跟随,有效解决了小型线圈固定使用时工作范围小的问题。
24、本发明实施例中的其他有益效果将在下文中进一步述及。
本文地址:https://www.jishuxx.com/zhuanli/20241106/325315.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表