基于障碍函数和耦合器约束的列车控制方法及相关装置
- 国知局
- 2024-11-06 15:06:20
本申请涉及列车控制,特别是涉及一种基于障碍函数和耦合器约束的列车控制方法及相关装置。
背景技术:
1、在对高速列车进行编组时,通过耦合装置将各节车厢进行连接,传递牵引力和制动力,使动车组能够按照统一的指令进行加速、减速和停车等操作。此外,部分耦合装置还具备信号传递功能,可以确保各车辆之间的通信畅通,实现列车运行状态的实时监控和调度。这些耦合装置在动车组列车中起着至关重要的作用,确保了列车整体运行的安全性和稳定性。
2、动车组之间的耦合装置主要包括机械耦合装置和电气耦合装置两大类,其中机械耦合装置包括车钩和缓冲装置,电气耦合装置包括电气连接器和网络控制系统。通常而言,耦合器中设有缓冲装置,可用于吸收和缓解列车运行过程中的冲击和振动,保护车辆结构和设备免受损坏。但是针对实际的列车耦合器系统来说,在高速动车组运行过程中,耦合器间的位移约束不仅受耦合器原材料本身物理硬件的制约,更重要的是为了确保列车的安全稳定运行。一旦耦合器位移超出了安全界限,列车系统的性能很可能遭受严重损害,甚至引起难以估量的安全事故。
3、当前在列车耦合系统的约束问题上,引入了一些控制策略,其中包括运用人工势函数来确保车钩耦合器的位移被严格限制在安全界限之内。然而,这种方法在实际操作中也有一定的局限性,特别是局部极小值点的位置波动和不必要的往复振动现象,这些不仅影响了旅客的乘车舒适度,还可能对车钩耦合器造成机械上的磨损与损害。另外,由于列车运行在复杂环境中,且外部环境的干扰变化具有很强的随机性和不确定性,想要获得准确的运行参数有时是非常困难的,这也是目前高速列车自动驾驶所面临的一个重点问题。因此需要设计一种先进的控制技术,以保证列车在运行过程中耦合装置间的位移严格处于安全界限范围内。
技术实现思路
1、本申请的目的是提供一种基于障碍函数和耦合器约束的列车控制方法及相关装置,可有效保证列车耦合器工作在安全范围内,有效保证列车的运行安全。
2、为实现上述目的,本申请提供了如下方案:
3、第一方面,本申请提供了一种基于障碍函数和耦合器约束的列车控制方法,包括以下步骤:
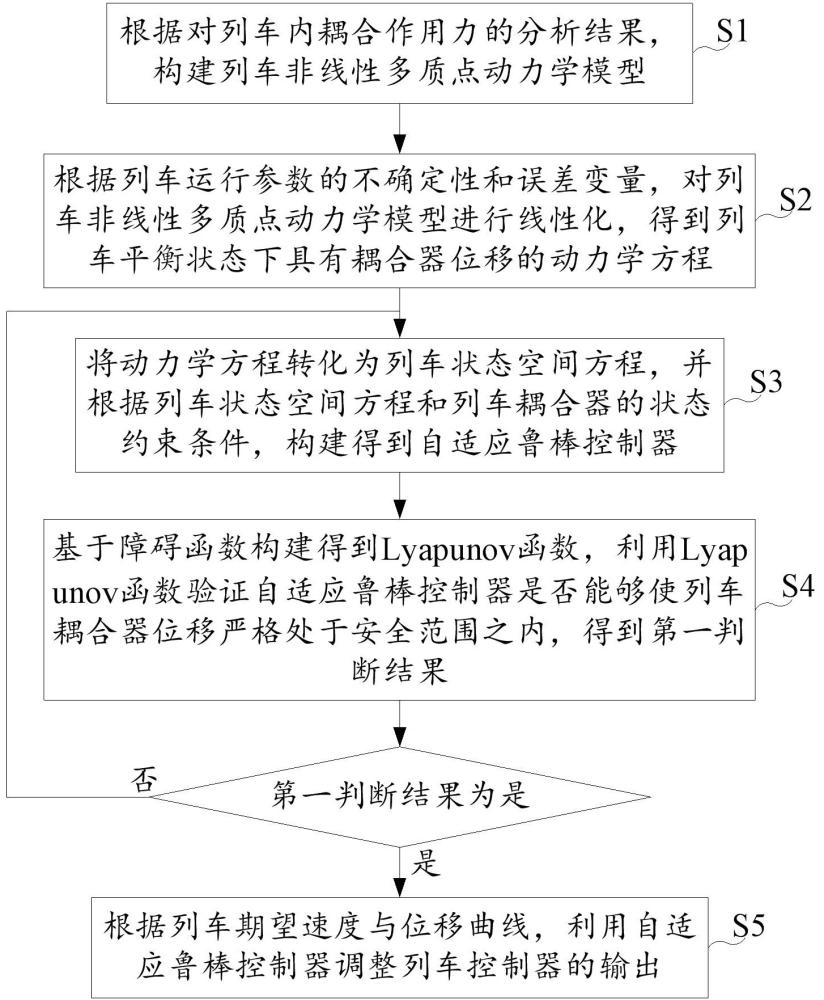
4、根据对列车内耦合作用力的分析结果,构建列车非线性多质点动力学模型。
5、根据列车运行参数的不确定性和误差变量,对列车非线性多质点动力学模型进行线性化,得到列车平衡状态下具有耦合器位移的动力学方程。
6、将动力学方程转化为列车状态空间方程,并根据列车状态空间方程和列车耦合器的状态约束条件,构建得到自适应鲁棒控制器。
7、基于障碍函数构建得到lyapunov函数,利用lyapunov函数验证自适应鲁棒控制器是否能够使列车耦合器位移严格处于安全范围之内,得到第一判断结果。
8、若第一判断结果为是,则根据列车期望速度与位移曲线,利用自适应鲁棒控制器调整列车控制器的输出。
9、第二方面,本申请提供了一种计算机设备,包括:存储器、处理器以存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序以实现前文所述的基于障碍函数和耦合器约束的列车控制方法的步骤。
10、第三方面,本申请提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现前文所述的基于障碍函数和耦合器约束的列车控制方法的步骤。
11、第四方面,本申请提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现前文所述的基于障碍函数和耦合器约束的列车控制方法的步骤。
12、根据本申请提供的具体实施例,本申请公开了以下技术效果:
13、本申请提供了一种基于障碍函数和耦合器约束的列车控制方法及相关装置,方法中通过对列车内耦合作用力的分析结果,构建列车非线性多质点动力学模型,随后考虑列车运行参数的不确定性和误差变量,对列车非线性多质点动力学模型进行线性化,得到列车平衡状态下具有耦合器位移的动力学方程;之后再将动力学方程转化为列车状态空间方程,并据此和列车耦合器的状态约束条件,构建得到自适应鲁棒控制器;在利用基于障碍函数构建得到的lyapunov函数验证自适应鲁棒控制器能够使列车耦合器位移严格处于安全范围之内后,即可根据列车期望速度与位移曲线,利用自适应鲁棒控制器调整列车控制器的输出。本申请所提出的方案能有效保证列车耦合器位移满足安全约束条件,即使耦合器在初始时刻存在被拉伸和压缩的情况,随着列车运行时间的推移,在所提自适应鲁棒控制的方法下,耦合器位移最终都能收敛到零区域附近;列车能根据实际运行情况和环境参数调整车厢的位移,确保列车整体运行的协调性和一致性,在不确定环境因素下也能实现高精度的跟踪运行,为乘客提供了更加平稳和舒适的乘车体验。
技术特征:1.一种基于障碍函数和耦合器约束的列车控制方法,其特征在于,包括:
2.根据权利要求1所述的基于障碍函数和耦合器约束的列车控制方法,其特征在于,所述列车非线性多质点动力学模型如下式所示:
3.根据权利要求2所述的基于障碍函数和耦合器约束的列车控制方法,其特征在于,所述动力学方程如下式所示:
4.根据权利要求3所述的基于障碍函数和耦合器约束的列车控制方法,其特征在于,所述列车状态空间方程如下式所示:
5.根据权利要求4所述的基于障碍函数和耦合器约束的列车控制方法,其特征在于,列车耦合器的状态约束条件如下式所示:
6.根据权利要求5所述的基于障碍函数和耦合器约束的列车控制方法,其特征在于,所述自适应鲁棒控制器如下式所示:
7.根据权利要求6所述的基于障碍函数和耦合器约束的列车控制方法,其特征在于,所述lyapunov函数如下式所示:
8.一种计算机设备,包括:存储器、处理器以存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序以实现权利要求1-7中任一项所述的基于障碍函数和耦合器约束的列车控制方法。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1-7中任一项所述的基于障碍函数和耦合器约束的列车控制方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1-7中任一项所述的基于障碍函数和耦合器约束的列车控制方法。
技术总结本申请公开了一种基于障碍函数和耦合器约束的列车控制方法及相关装置,涉及列车控制技术领域,该方案中通过对列车内耦合作用力的分析,构建列车非线性多质点动力学模型,随后考虑列车运行参数的不确定性,对其进行线性化得到列车平衡状态下具有耦合器位移的动力学方程;之后再将其转化为列车状态空间方程,并据此和耦合器的状态约束条件,构建得到自适应鲁棒控制器;在利用基于障碍函数的Lyapunov函数验证其能够使列车耦合器位移严格处于安全范围之内后,即可根据列车期望速度与位移曲线,自适应调整列车控制器的输出。本申请所提出的方案能有效保证列车耦合器位移满足安全约束条件,在不确定环境因素下也能实现高精度的跟踪运行。技术研发人员:谢春华,樊邦昌,张艳艳,张剑平,刘永康,杨辉,李中奇,王辉,张坤鹏,周艳丽受保护的技术使用者:华东交通大学技术研发日:技术公布日:2024/11/4本文地址:https://www.jishuxx.com/zhuanli/20241106/325327.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。