一种自行车车架机器人后三角下叉三维柔性工装的制作方法
- 国知局
- 2024-11-12 13:57:07
本技术涉及自行车加工生产设备的,具体为一种自行车车架机器人后三角下叉三维柔性工装。
背景技术:
1、自行车车架的后三角部分是自行车结构的核心,焊接质量直接关系到整车的强度和稳定性。由于后三角下叉结构的复杂性,传统焊接方法难以满足生产的高效率和高精度要求。
2、现有专利(公告号:cn210162211u3)公开的,其通过第一夹持装置、第二夹持装置及支撑杆的设置可使得自行车的前三角、上叉、钩爪及下叉拼接成完整的车架,减小车架零部件的晃动,便于固定零部件,从而完成焊接操作;滑动板的设置可将定位块固定于工作台上合适的位置处,以便于固定不同型号的车架;卡块及夹具的设置可减小中管的晃动,提高固定中管时的稳定性。
3、但是上述的技术方案仍存在一定的缺陷,首先该设备在针对不同规格尺寸的工件时需要对各个夹具进行位置调节,但是逐一调节颇为繁琐,影响加工效率,为此,提出一种自行车车架机器人后三角下叉三维柔性工装。
技术实现思路
1、基于此,本实用新型的目的是提供一种自行车车架机器人后三角下叉三维柔性工装,以解决上述背景中提出的技术问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种自行车车架机器人后三角下叉三维柔性工装,包括工作台,所述工作台的上表面固定连接有多个滑轨,多个滑轨的表面分别滑动连接有耳部夹具、上压下托夹具、下压件夹具以及五通管夹具,且各个夹具的内部均固定设有锁止组件;
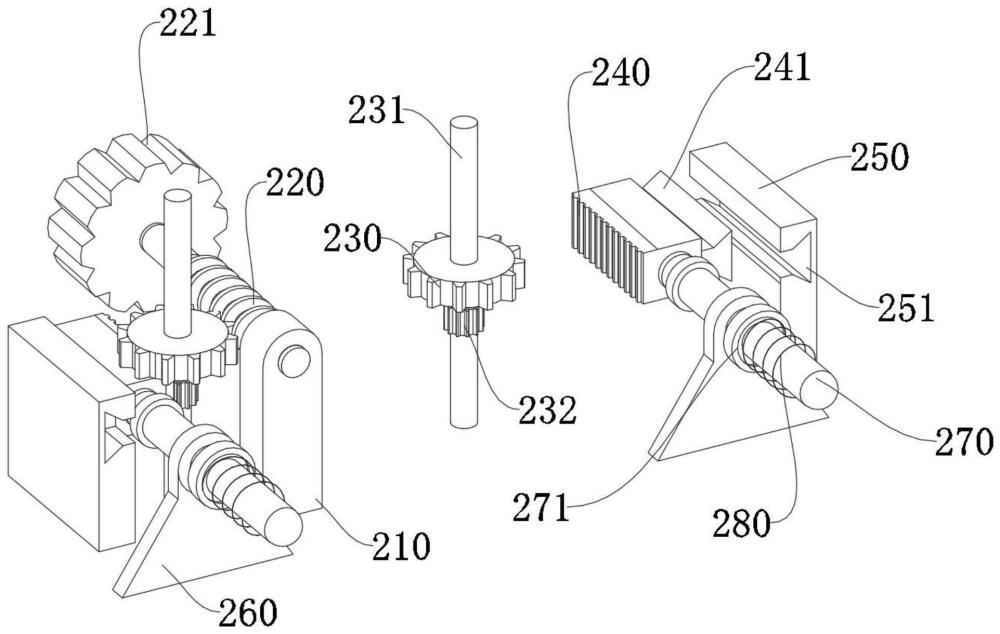
3、所述锁止组件包括第一支撑架和定块以及第二支撑块,所述第一支撑架的上端转动连接有蜗杆,所述蜗杆的两侧外壁均啮合有蜗轮,所述定块的上端滑动连接有齿条,所述第二支撑块的上端贯穿滑动设有卡杆。
4、作为本实用新型的一种自行车车架机器人后三角下叉三维柔性工装优选技术方案,每个所述蜗杆均贯穿各个夹具外壁,每个所述蜗轮的中心均固定连接有轴杆,位于轴杆的外壁在蜗轮的下端固定连接有齿轮,且齿轮啮合连接于齿条。
5、作为本实用新型的一种自行车车架机器人后三角下叉三维柔性工装优选技术方案,所述定块的上端开设有滑动槽,所述齿条靠近于定块的一侧外壁固定连接有限位滑块,且限位滑块滑动连接于滑动槽内部,在卡杆的外壁上,位于所述第二支撑块的一侧固定连接有限位环,所述卡杆的外壁套设有弹簧,且弹簧的一端固定连接于限位环,所述蜗杆的一端固定连接有转轮,且所述蜗杆的另一端均转动贯穿于各个夹具。
6、作为本实用新型的一种自行车车架机器人后三角下叉三维柔性工装优选技术方案,所述工作台的下表面四角均固定连接有支撑腿,每个所述支撑腿的底端均固定连接有脚垫,每个所述滑轨的外壁均开设有多个卡孔,每个所述滑轨的两端均固定设有侧限位块,部分所述滑轨的中间固定设有中限位块。
7、作为本实用新型的一种自行车车架机器人后三角下叉三维柔性工装优选技术方案,所述耳部夹具以及多个夹具又包括滑块,所述滑块的一侧上表面固定连接有固定孔,所述滑块下表面开设有滑槽,每个所述滑槽的一侧内壁均固定连接有限位管。
8、作为本实用新型的一种自行车车架机器人后三角下叉三维柔性工装优选技术方案,所述五通管夹具又包括架板,所述架板的两端均转动连接有螺纹杆,两组所述螺纹杆的同一端均转动连接有夹持锥块,所述螺纹杆的另一端固定连接有扭轮。
9、作为本实用新型的一种自行车车架机器人后三角下叉三维柔性工装优选技术方案,所述夹持锥块为锥形,且材质为橡胶。
10、综上所述,本实用新型主要具有以下有益效果:
11、本实用新型通过首先将滑块移动到合适位置,然后转动转轮和蜗杆,利用蜗杆同时啮合,带动两侧的蜗轮,然后齿轮啮合带动齿条移动,齿条抵动卡杆卡入卡孔内部,如此调校固定各个夹具,以此实现对夹具的快速固定,提高安装效率;其次分别转动两侧的扭轮和螺纹杆,将间距扩大,再将五通管放入,再反方向转动扭轮,利用两组夹持锥块同时向中间靠拢对五通管的实现自定心夹紧。
技术特征:1.一种自行车车架机器人后三角下叉三维柔性工装,包括工作台(100),其特征在于:所述工作台(100)的上表面固定连接有多个滑轨(110),多个滑轨(110)的表面分别滑动连接有耳部夹具(120)、上压下托夹具(130)、下压件夹具(140)以及五通管夹具(150),且各个夹具的内部均固定设有锁止组件(200);
2.根据权利要求1所述的一种自行车车架机器人后三角下叉三维柔性工装,其特征在于:每个所述蜗杆(220)均贯穿各个夹具外壁,每个所述蜗轮(230)的中心均固定连接有轴杆(231),位于轴杆(231)的外壁在蜗轮(230)的下端固定连接有齿轮(232),且齿轮(232)啮合连接于齿条(240)。
3.根据权利要求1所述的一种自行车车架机器人后三角下叉三维柔性工装,其特征在于:所述定块(250)的上端开设有滑动槽(251),所述齿条(240)靠近于定块(250)的一侧外壁固定连接有限位滑块(241),且限位滑块(241)滑动连接于滑动槽(251)内部,在卡杆(270)的外壁上,位于所述第二支撑块(260)的一侧固定连接有限位环(271),所述卡杆(270)的外壁套设有弹簧(280),且弹簧(280)的一端固定连接于限位环(271),所述蜗杆(220)的一端固定连接有转轮(221),且所述蜗杆(220)的另一端均转动贯穿于各个夹具。
4.根据权利要求1所述的一种自行车车架机器人后三角下叉三维柔性工装,其特征在于:所述工作台(100)的下表面四角均固定连接有支撑腿(101),每个所述支撑腿(101)的底端均固定连接有脚垫(102),每个所述滑轨(110)的外壁均开设有多个卡孔(113),每个所述滑轨(110)的两端均固定设有侧限位块(111),部分所述滑轨(110)的中间固定设有中限位块(112)。
5.根据权利要求1所述的一种自行车车架机器人后三角下叉三维柔性工装,其特征在于:所述耳部夹具(120)以及多个夹具又包括滑块(121),所述滑块(121)的一侧上表面固定连接有固定孔(122),所述滑块(121)下表面开设有滑槽(123),每个所述滑槽(123)的一侧内壁均固定连接有限位管(1231)。
6.根据权利要求1所述的一种自行车车架机器人后三角下叉三维柔性工装,其特征在于:所述五通管夹具(150)又包括架板(151),所述架板(151)的两端均转动连接有螺纹杆(152),两组所述螺纹杆(152)的同一端均转动连接有夹持锥块(1522),所述螺纹杆(152)的另一端固定连接有扭轮(1521)。
7.根据权利要求6所述的一种自行车车架机器人后三角下叉三维柔性工装,其特征在于:所述夹持锥块(1522)为锥形,且材质为橡胶。
技术总结本技术公开了一种自行车车架机器人后三角下叉三维柔性工装,涉及自行车加工生产设备的技术领域,包括工作台,所述工作台的上表面固定连接有多个滑轨,多个滑轨的表面分别滑动连接有耳部夹具、上压下托夹具、下压件夹具以及五通管夹具。本技术通过首先将滑块移动到合适位置,然后转动转轮和蜗杆,利用蜗杆同时啮合,带动两侧的蜗轮,然后齿轮啮合带动齿条移动,齿条抵动卡杆卡入卡孔内部,如此调校固定各个夹具,以此实现对夹具的快速固定,提高安装效率;其次分别转动两侧的扭轮和螺纹杆,将间距扩大,再将五通管放入,再反方向转动扭轮,利用两组夹持锥块同时向中间靠拢对五通管的实现自定心夹紧。技术研发人员:高万朋,王哲君,王鹏骅受保护的技术使用者:深圳市科泰智能机器人科技有限公司技术研发日:20240221技术公布日:2024/11/7本文地址:https://www.jishuxx.com/zhuanli/20241112/326694.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表