一种基于前后仿真策略和多目标优化的电路寻优方法
- 国知局
- 2024-11-19 09:33:52
本发明涉及eda、模拟电路设计、多目标优化技术以及仿真策略,尤其涉及一种基于前后仿真策略和多目标优化的电路寻优方法。
背景技术:
1、电子设计自动化 (eda) 是电子设计与制造技术发展中的核心。eda 技术是以计算机为工具,采用硬件描述语言的表达方式,对数据库、计算数学、图论、图形学及拓扑逻辑、优化理论等进行科学、有效的融合,从而形成一种电子系统专用的新技术,是计算机技术、信号处理技术、信号分析技术的最新成果。
2、eda 技术的出现不仅更好地保证了电子工程设计各级别的仿真、调试和纠错,为其发展带来强有力的技术支持,并且在电子、通信、化工、航空航天、生物等各个领域占有越来越重要的地位,很大程度上减轻了相关从业者的工作强度。
3、模拟电路设计是一门非常重要的技术领域,涉及到了模拟信号的处理和放大,以及各种模拟电路元件的使用和设计。模拟电路设计的难度在于需要在速度、功耗、增益、精度、电源电压、噪声、面积等多种因素间进行折中,而数字设计只需在功耗、速度和面积三个因素间进行平衡。此外,模拟电路对噪声、串扰和其他干扰比数字电路敏感得多。
4、现代电路设计复杂,高性能模拟电路的设计是一个耗时的过程,需要高素质设计人员的参与以及与eda工具频繁繁琐的交互。
技术实现思路
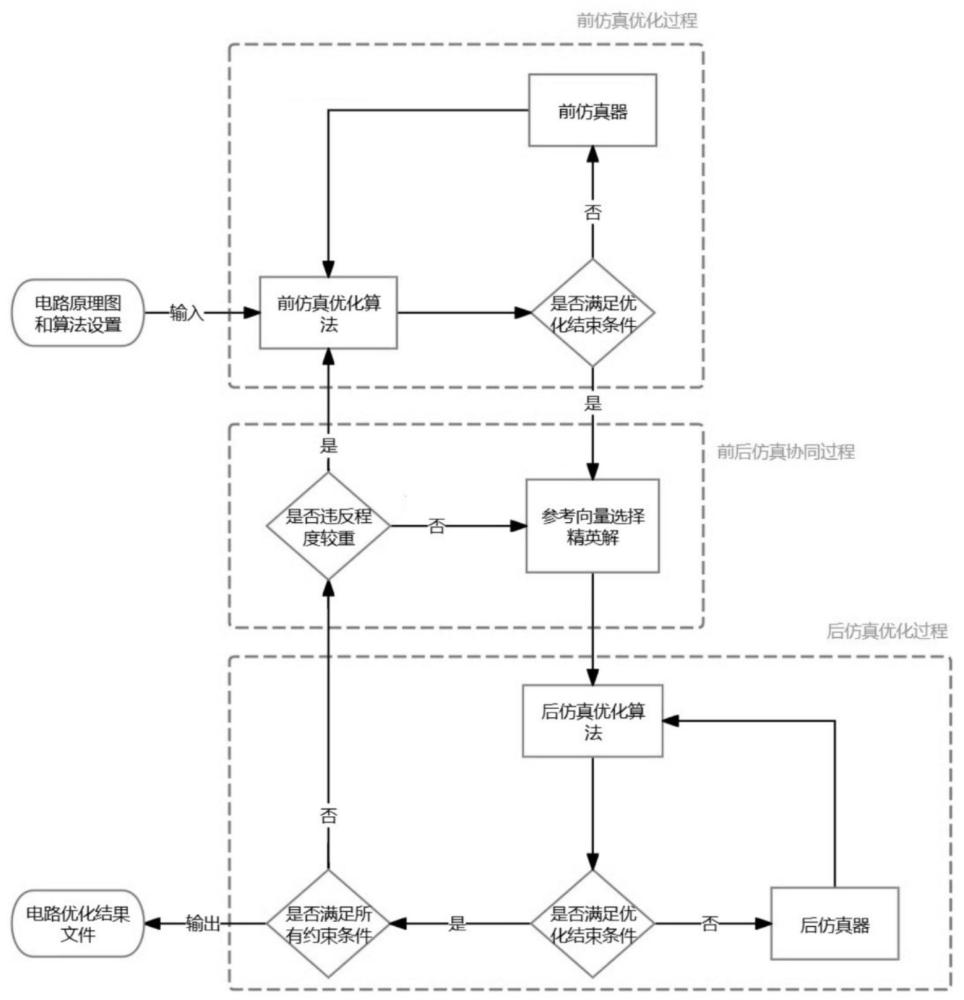
1、本发明的目的在于提供一种基于前后仿真策略和多目标优化的电路寻优方法,将使用多目标优化的元启发式策略设计算法,自动调用eda仿真工具,并采取前后仿真的优化策略对电路进行寻优,通过设计前后仿真的协同和反馈机制,有效地提升了电路寻优的效率,极大提高当前以人工为主的模拟电路设计的生产效率,用于辅助甚至取代人工的电路设计工作,提高电路设计的效率。以解决现在技术中现代电路设计复杂,高性能模拟电路的设计耗时,需要高素质设计人员的参与以及与eda工具频繁繁琐的交互的技术问题。
2、为了解决上述技术问题,本发明基于前后仿真策略和多目标优化的电路寻优方法包括以下步骤:
3、s0:获取要优化的电路原理图、电路指标要求、前仿真的仿真器设置文件和算法参数设置文件。
4、s1:将电路原理图、电路指标要求、前仿真的仿真器设置文件和算法参数设置文件输入到前仿真算法;上述文件对电路元器件的数量、类型、连接方式和器件属性进行了设置和定义;
5、s2:根据电路原理图、电路指标要求和算法参数设置文件对前仿真算法进行初始化;具体包括以下步骤:
6、s21:选取两个或多个相互冲突的仿真指标作为优化目标;选取其它若干关心的仿真指标作为优化约束;选取要优化的电路器件参数作为决策变量。
7、在不失一般性的情况下,最小化多目标问题可以表述为:
8、<mi>min </mi><mi>f</mi><mi>(x)=[</mi><msub><mi>f</mi><mn>1</mn></msub><mi>x</mi></mfenced><mi>,</mi><msub><mi>f</mi><mn>2</mn></msub><mi>x</mi></mfenced><mi>,…</mi><msub><mi>f</mi><mi>i</mi></msub><mi>x</mi></mfenced><mi>…,</mi><msub><mi>f</mi><mi>m</mi></msub><mi>(x)]</mi>
9、并且满足:
10、
11、
12、其中,是维的决策向量,是目标数,是约束数;在电路参数优化过程中,代表了一组电路参数,也可以视作一个解;表示的第个目标值;和分别表示的第个不等式约束和等式约束,通常在满足约束时设置为小于等于的值;
13、若有解和,则定义帕累托支配(pareto dominate)关系如下:
14、如果:
15、
16、并且存在至少一个使得,其中是优化目标数,则称支配;
17、电路参数多目标优化的理想结果是一个帕累托非支配解集,即解集中的任意两个解和之间都不满足帕累托支配关系;
18、将除目标外其它关心的仿真指标设置为不等式约束关系或者等式约束关系;规定:约束违反总数越少的解越优,相同违反数时违反程度越小的解越优;因此定义第个约束关系的违反程度:
19、
20、其中,是当前解的约束指标值,是期望达到的约束指标值,是一个权重因子,在不同的约束条件下的定义不同,具体如下:
21、在不等式约束中,若大于等于满足要求,定义:
22、
23、反之若小于等于满足要求,定义:
24、
25、在等式约束中,定义:
26、
27、因此,约束关系或者由违反程度算出;当第个约束关系是不等式约束时,,;反之,当第个约束关系是等式约束时,,;将求和得到总的约束违反程度:
28、
29、s22:初始化算法参数,包括:种群大小、目标数、约束数、解的维度、迭代总数、子种群个数和精英解数量;然后生成随机初始种群;
30、s23:启动前仿真器和前仿真算法,根据前仿真的仿真器设置文件初始化前仿真器,检查算法与前仿真器的通信是否良好;在前仿真过程中,不需要考虑实际的电路中的器件工艺、空间位置、温度、布线约束等因素产生的影响,只考虑最理想情况下电路的运行情况;
31、s24:前仿真算法将每个解发送给前仿真器,前仿真器计算出每个解的各个前仿真指标值并发送给前仿真算法,前仿真算法再根据前仿真指标值计算出每个解的目标值和约束值、;
32、s3:前仿真算法使用元启发式策略对电路参数进行迭代寻优;该元启发式策略的具体步骤如下:
33、s31:根据当前解集的目标值和约束值挑选出帕累托前沿(pareto front)解作为亲本,用以生成后代;
34、s32:通过针对参数优化的交叉算子和变异算子,计算出后代种群,其大小与亲本相同;
35、s33:计算后代种群的和约束值、,计算方法同s24;
36、s34:使用非支配排序进行环境选择,挑选出非支配解,再使用自适应参考向量的方法对非支配解进行筛选,得到最优秀的前个解作为下一代的种群;即保证任意第代的解和第代的解满足:非支配。
37、自适应参考向量的方法具体步骤如下:
38、s341:使用规范的单纯形网格设计方法在单元超平面上生成一组均匀分布的点:
39、
40、每个点是一个向量,向量中的元素属于离散集合,其中,这里为均匀分布点的数量,等于子种群个数,为目标数,为单纯形网格设计的正整数。然后,可以得到相应的单位参考向量。
41、
42、其中,表示向量的欧氏范数;
43、s342:目标值转换:将种群中的个体的目标值转化为目标向量,通过下面的方法:
44、<mi>f(x)=[</mi><msub><mi>f</mi><mn>1</mn></msub><mi>x</mi></mfenced><mi>,</mi><msub><mi>f</mi><mn>2</mn></msub><mi>x</mi></mfenced><mi>,…</mi><msub><mi>f</mi><mi>i</mi></msub><mi>x</mi></mfenced><mi>…,</mi><msub><mi>f</mi><mi>m</mi></msub><mi>(x)]</mi>
45、
46、<msup><mi>f</mi><mi>'</mi></msup><mi>(x)=[</mi><msup><msub><mi>f</mi><mn>1</mn></msub><mi>'</mi></msup><mi>x</mi></mfenced><mi>,</mi><msup><msub><mi>f</mi><mn>2</mn></msub><mi>'</mi></msup><mi>x</mi></mfenced><mi>,…</mi><msup><msub><mi>f</mi><mi>i</mi></msub><mi>'</mi></msup><mi>x</mi></mfenced><mi>…,</mi><msup><msub><mi>f</mi><mi>m</mi></msub><mi>'</mi></msup><mi>(x)]</mi>
47、其中,表示第几个目标;是在目标空间中是一个维的向量,称之为目标向量。
48、s343:通过将种群中的每个解与其最近的参考向量相关联,第个解称作,它的目标向量与第个参考向量之间的余弦值可以计算为:
49、
50、这里,,表示第个解的目标向量与第个参考向量之间的角度,表示目标向量的欧氏范数。
51、s344:在个子种群中选择角度惩罚距离(apd)距离最小的个体作为精英解;用衡量收敛性标准,用衡量多样性标准,为了平衡两者之间的关系,定义角度惩罚距离为:
52、
53、其中:
54、
55、是超参数,表示形成夹角最小的其他参考向量的角度,表示当前的迭代次数,表示迭代总数,是目标数。
56、s345:自适应调整参考向量,使得种群划分更加均匀:
57、
58、其中,是当前迭代次数,表示代的第个参考向量,表示初始的第个参考向量,和分别表示代中每个目标函数的最大值和最小值,算子表示阿达玛乘积(hadamard product),表示向量的欧氏范数。
59、s35:重复s31到s34直到满足优化退出条件,然后输出优化后的种群;该过程也称作前仿真优化过程;
60、s4:使用自适应参考向量的方法,在前仿真优化过程的输出种群中挑选出个精英解作为后仿真优化过程中后仿真优化算法的初始种群;
61、s5:输入元器件工艺库文件、电路指标要求、布局布线设置文件、算法设置文件和前仿真的个精英解;然后根据这些文件初始化后仿真算法;具体步骤如下:
62、s51:选取一个或多个相互冲突的仿真指标作为优化目标;选取其它若干关心的仿真指标作为优化约束;选取多个目标时的原理同s21所述一致;一般而言,后仿真过程中的目标或约束选择有最小化走线长度、功耗优化、层叠设计、热管理和测试维护等;
63、s52:初始化后仿真算法参数,包括:种群大小、目标数、约束数、解的维度、迭代次数;然后用前仿真的个精英解生成初始种群;
64、s53:启动后仿真器,检查后仿真算法与后仿真器的通信是否良好;
65、s54:后仿真算法将每个解发送给后仿真器,后仿真器计算出每个解的各个后仿真指标值并发送给后仿真算法,后仿真算法再根据后仿真结果计算出每个解的目标值和约束值;
66、s6:后仿真算法使用元启发式策略对电路布局布线进行迭代寻优;该元启发式策略的具体步骤如下:
67、s61:根据当前解集的目标值和约束值挑选出帕累托前沿(pareto front)解作为亲本,用以生成后代;
68、s62:通过布局布线交叉变异算子,计算出后代种群,其大小与亲本相同;
69、s63:计算后代种群的目标值和约束值,计算方法同s54;
70、s64:当有多个目标时,使用非支配排序进行环境选择,挑选出非支配解,再使用自适应参考向量的方法对非支配解进行筛选,得到最优秀的前个解作为下一代的种群;单目标时,在亲本和子代中选择目标值与约束值之和最小的前 个解作为下一代的种群;
71、s65:重复s61到s64直到满足优化退出条件,然后输出优化后的解;该过程也称作后仿真优化过程;
72、s7:s6输出的解若满足约束要求,则予以采用;反之,根据其不满足的具体情况,自适应选择反馈策略:若违反程度较轻,则调整s4步骤的参考向量,若违反程度较重,则调整s2步骤的初始化解集,然后继续进行优化。s7与s4统称为前后仿协同过程;
73、相对于现有技术,本发明具有以下有益技术效果:
74、1)本发明能够提高优化效率,减少设计周期:通过结合前仿真和后仿真的策略,可以更好地评估和预测电路的性能,减少不必要的仿真计算,提高整体优化效率。
75、2)本发明支持多目标优化,能够在设计过程中同时考虑多个性能指标,如功耗、面积、速度等,从而得到更加均衡和优质的电路设计方案。
76、3)本发明灵活性和适应性强:该方法适用于各种类型的电路设计,不仅限于特定类型的电路,具有广泛的应用前景和灵活性。
77、4)本发明能够降低设计成本:通过优化过程中的高效仿真和多目标优化,可以减少反复试验和修改的次数,降低总体设计成本。
本文地址:https://www.jishuxx.com/zhuanli/20241118/329317.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。