一种具有环抱、夹持功能的真空吸具装置的制作方法
- 国知局
- 2024-11-19 09:35:39
本发明涉及真空吸具,具体涉及一种具有环抱、夹持功能的真空吸具装置。
背景技术:
1、工业生产中,经常会对制成品给予一定的包装,以对其进行保护或方便运输,比如用纸箱包装起来的家电,比如用软膜塑料包装起来的多罐饮料,比如用铁桶包装起来的油漆,再比如用捆扎绳捆扎起来的多瓶啤酒等。为保持工作场地的整洁,会将这些包装物品堆放在一起,为方便搬放及提高搬放效率,通常会将上述物品摆放在叉车盘上,使用叉车对其进行搬放,具体为:将叉车的前叉插入叉车盘,叉车将摆放在叉车盘上的多件物品进行搬运堆放。这种作业方式,因多件物品摆放在叉车盘上,物品间是离散状态,在叉车移动过程中,叉车盘边缘区域物品时常发生脱离,造成物品损坏。而在物品运输时,因叉车盘会占据一定的空间,为节省运输空间,叉车盘一般不会伴随物品放置在运输车辆上,这样,就得采用人工,将这些物品逐件搬放到运输车辆上,运输车辆到达目的地后,又得采用人工,逐件将这些物品从运输车辆上卸下,这种人工作业方式,耗费人力,劳动强度大,生产效率低。
2、为解决上述问题,目前采用搬运机器人加真空吸具来替代叉车、人力进行物品搬放,即,将真空吸具安装在搬运机器人的机械臂上,搬运机器人操控机械臂使真空吸具将物品吸附,后搬运机器人使吸附物品的机械臂移动到目标位置,并使真空吸具将物品释放,以实现对物品的搬放。
3、这种采用搬运机器人加真空吸具方式,主要依靠真空吸具给予物品的向上吸附力来实现物品的抓取,同时依靠真空吸具极速释放特性,将物品放置,虽然节省了人力,避免了叉车可能使物品摔坏,但在搬运机器人对多件物品进行搬放时,因物品间是离散状态,且相邻物品间会有缝隙,缝隙影响了真空吸具的整体吸附性能,常常发生搬运机器人搬放多件物品时,真空吸具吸附多件物品的吸附力不稳定导致有落件现象,因相邻物品间的缝隙影响了真空吸具的整体吸附性能,使真空吸具不能吸附大重量多件物品,从而限制了搬运机器人对多件物品的搬放,导致搬运机器人搬放效率低。
技术实现思路
1、为此,本发明提供一种具有环抱、夹持功能的真空吸具装置,主要解决现有技术的搬运机器人搬放多件物品时真空吸具吸附多件物品因吸附力不稳定导致有落件现象,且真空吸具不能吸附大重量多件物品,导致搬运机器人搬放效率低的技术问题。
2、为了实现上述目的,本发明提供如下技术方案:
3、一种具有环抱、夹持功能的真空吸具装置,包括真空吸具;所述真空吸具上设有环抱夹持装置;所述环抱夹持装置可围绕在待搬运的物品四周,且可将待搬运的物品夹紧。
4、优选地,所述环抱夹持装置可伸缩的设置在所述真空吸具上。
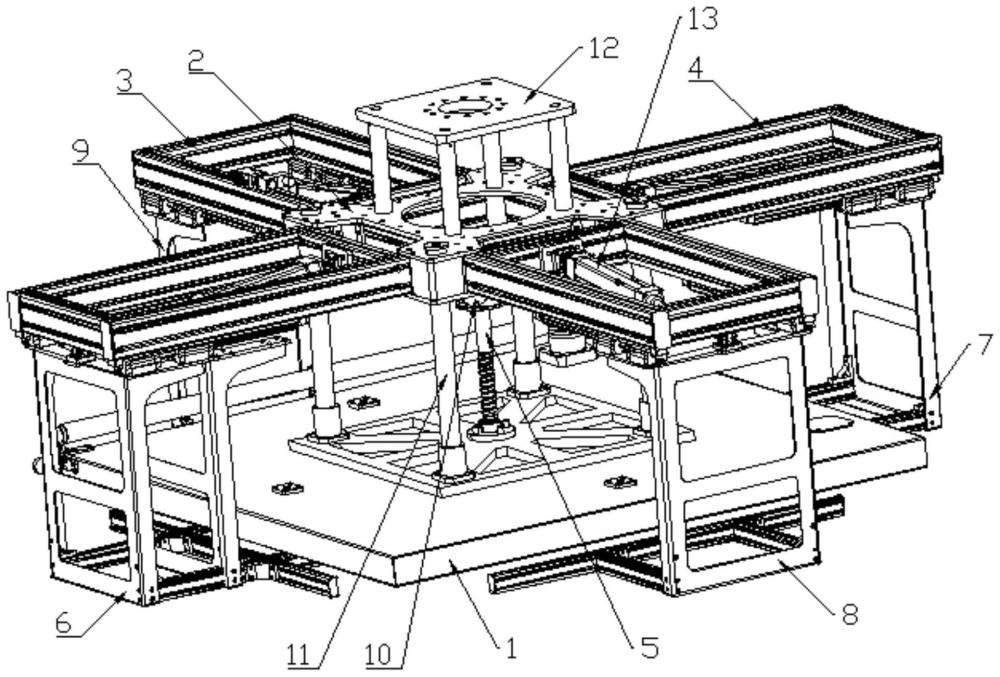
5、可选地,还包括支架座;所述环抱夹持装置设置在所述支架座上,所述支架座上设有调距电机;所述调距电机输出轴上设有调距丝杆;所述调距丝杆和所述真空吸具螺纹连接,调距电机正、反向旋转时,驱动调距丝杆正、方向旋转,在螺纹作用下,环抱夹持装置接近或远离真空吸具,以适应不同高度的物品。
6、优选地,所述真空吸具上设有多根滑动导杆;所述支架座上设有与所述滑动导杆适配的滑动导向孔;所述滑动导杆本体可活动穿插在所述滑动导向孔内。
7、可选地,所述环抱夹持装置包括固定设置在所述支架座上的第一滑动架及第二滑动架;所述第一滑动架和第二滑动架交叉垂直;所述第一滑动架前、后两侧分别滑动设置第三夹持臂和第四夹持臂;所述第二滑动架左、右两侧分别滑动设置第一夹持臂和第二夹持臂;所述支架座上分别设有驱动所述第一夹持臂、第二夹持臂、第三夹持臂和第四夹持臂滑动的驱动气缸;所述驱动气缸的伸缩杆和所述第一夹持臂或第二夹持臂或第三夹持臂或第四夹持臂连接。
8、可选地,所述环抱夹持装置包括设置在所述真空吸具上的滑动架;所述滑动架左、右两侧分别滑动设置左夹持臂和右夹持臂;所述左夹持臂、右夹持臂上均设有弧形夹持部;还设置有夹持臂驱动装置,用于驱动左夹持臂、右夹持臂滑动。
9、可选地,所述夹持臂驱动装置为设置在所述真空吸具上的电机;所述电机输出轴上连接有丝杆;所述丝杆左、右两侧分别开设有正、反螺纹;所述丝杆左、右两侧的正、反螺纹分别和所述左夹持臂、右夹持臂螺纹连接;所述电机正、反旋转时,驱动丝杆转动,在左、右螺纹作用下,所述左夹持臂、右夹持臂接近或远离,将欲搬运物品夹紧或释放。
10、可选地,所述夹持臂驱动装置为设置在所述滑动架上的驱动气缸;所述驱动气缸的伸缩杆和所述左夹持臂或右夹持臂连接。
11、可选地,所述真空吸具至少有2个,且固定为一体,每个真空吸具对应不同的待搬运物品。
12、可选地,所述真空吸具腔体内设有多根分隔条;所述分隔条将所述真空吸具腔体分成多个独立单元,使所述真空吸具具有多个独立吸附区,每个独立吸附区对应不同的待搬运物品。
13、本发明至少具有以下有益效果:
14、其设置真空吸具,真空吸具上设有环抱夹持装置,环抱夹持装置可围绕在待搬运的物品四周,且可将待搬运的物品夹紧,在环抱夹持装置在作用下,多件物品被夹笼为一体,将多件物品离散状态改变为类整体状态,物品间的缝隙变小,甚至封闭,可增强真空吸具的吸附性能;环抱夹持装置对物品的夹持力,也加大了物品间上下移动阻力,增加了落件难度;环抱夹持装置对待搬运物品施加夹紧力的同时,还对待搬运物品有一个向上的牵引力,在真空吸具的吸附力及环抱夹持装置向上牵引力的双重作用下,使得本申请真空吸具装置具备了对大重量多件物品进行吸附的能力;同时,在实际应用发现,其还具有吸附超重物品的功能,解决了目前真空吸具无法吸附超重物品的问题。
15、由此可见,本发明的一种具有环抱、夹持功能的真空吸具装置具有吸附多件物品不落件,可吸附大重量多件物品,极大提高了搬运效率及可吸附超重物品等优点。
技术特征:1.一种具有环抱、夹持功能的真空吸具装置,其特征在于,包括真空吸具(1);所述真空吸具(1)上设有环抱夹持装置;所述环抱夹持装置可围绕在待搬运的物品四周,且可将待搬运的物品夹紧。
2.根据权利要求1所述的一种具有环抱、夹持功能的真空吸具装置,其特征在于,所述环抱夹持装置可伸缩的设置在所述真空吸具(1)上。
3.根据权利要求2所述的一种具有环抱、夹持功能的真空吸具装置,其特征在于,还包括支架座(2);所述环抱夹持装置设置在所述支架座(2)上,所述支架座(2)上设有调距电机(10);所述调距电机(10)输出轴上设有调距丝杆(5);所述调距丝杆(5)和所述真空吸具(1)螺纹连接,调距电机(10)正、反向旋转时,驱动调距丝杆(5)正、方向旋转,在螺纹作用下,环抱夹持装置接近或远离真空吸具(1),以适应不同高度的物品。
4.根据权利要求3所述的一种具有环抱、夹持功能的真空吸具装置,其特征在于,所述真空吸具(1)上设有多根滑动导杆(11);所述支架座(2)上设有与所述滑动导杆(11)适配的滑动导向孔;所述滑动导杆(11)本体可活动穿插在所述滑动导向孔内。
5.根据权利要求4所述的一种具有环抱、夹持功能的真空吸具装置,其特征在于,所述环抱夹持装置包括固定设置在所述支架座(2)上的第一滑动架(3)及第二滑动架(4);所述第一滑动架(3)和第二滑动架(4)交叉垂直;所述第一滑动架(3)前、后两侧分别滑动设置第三夹持臂(8)和第四夹持臂(9);所述第二滑动架(4)左、右两侧分别滑动设置第一夹持臂(6)和第二夹持臂(7);所述支架座(2)上分别设有驱动所述第一夹持臂(6)、第二夹持臂(7)、第三夹持臂(8)和第四夹持臂(9)滑动的驱动气缸(13);所述驱动气缸(13)的伸缩杆和所述第一夹持臂(6)或第二夹持臂(7)或第三夹持臂(8)或第四夹持臂(9)连接。
6.根据权利要求1所述的一种具有环抱、夹持功能的真空吸具装置,其特征在于,所述环抱夹持装置包括设置在所述真空吸具(1)上的滑动架(15);所述滑动架(15)左、右两侧分别滑动设置左夹持臂(16)和右夹持臂(17);所述左夹持臂(16)、右夹持臂(17)上均设有弧形夹持部(20);还设置有夹持臂驱动装置,用于驱动左夹持臂(16)、右夹持臂(17)滑动。
7.根据权利要求6所述的一种具有环抱、夹持功能的真空吸具装置,其特征在于,所述夹持臂驱动装置为设置在所述真空吸具(1)上的电机(18);所述电机(18)输出轴上连接有丝杆(19);所述丝杆(19)左、右两侧分别开设有正、反螺纹;所述丝杆(19)左、右两侧的正、反螺纹分别和所述左夹持臂(16)、右夹持臂(17)螺纹连接;所述电机(18)正、反旋转时,驱动丝杆(19)转动,在左、右螺纹作用下,所述左夹持臂(16)、右夹持臂(17)接近或远离,将欲搬运物品夹紧或释放。
8.根据权利要求6所述的一种具有环抱、夹持功能的真空吸具装置,其特征在于,所述夹持臂驱动装置为设置在所述滑动架(15)上的驱动气缸(13);所述驱动气缸(13)的伸缩杆和所述左夹持臂(16)或右夹持臂(17)连接。
9.根据权利要求1至8任意一项所述的一种具有环抱、夹持功能的真空吸具装置,其特征在于,所述真空吸具(1)至少有2个,且固定为一体,每个真空吸具(1)对应不同的待搬运物品。
10.根据权利要求1至8任意一项所述的一种具有环抱、夹持功能的真空吸具装置,其特征在于,所述真空吸具(1)腔体(101)内设有多根分隔条(1011);所述分隔条(1011)将所述真空吸具(1)腔体(101)分成多个独立单元,使所述真空吸具(1)具有多个独立吸附区,每个独立吸附区对应不同的待搬运物品。
技术总结本发明涉及一种具有环抱、夹持功能的真空吸具装置,包括真空吸具;所述真空吸具上设有环抱夹持装置;所述环抱夹持装置可围绕在待搬运的物品四周,且可将待搬运的物品夹紧。本发明具有吸附多件物品不落件,可吸附大重量多件物品,极大提高了搬运效率及可吸附超重物品等优点。技术研发人员:请求不公布姓名,请求不公布姓名受保护的技术使用者:汉瓦真空技术(无锡)有限公司技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/329418.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表