驱动传动改向支撑组件、可用于镜下的椎间融合器及旋具的制作方法
- 国知局
- 2024-11-19 09:36:14
本技术涉及医疗器械领域,特别涉及一种驱动传动改向支撑组件、一种可用于镜下的椎间融合器、以及一种旋具。
背景技术:
1、脊椎,又称脊柱,是位于脊椎动物背侧的支撑性中轴骨骼。
2、人类的脊柱由32-34块椎骨和中间起缓冲作用的椎间盘组成,具有支持躯干、保护其内脊髓及神经根的作用,脊柱包括12节胸椎、5节腰椎等。
3、正常的成人脊柱,从侧面观察有颈、胸、腰、骶4个生理性弯曲。颈部和腰部向前突出的脊柱弯曲被称为脊柱前凸,胸部和尾部向后突出的脊柱弯曲被称为脊柱后凸。脊柱前凸和脊柱后凸由同一椎间盘的前(人体腹部方向)、后厚度不同来保证。比如,腰椎间盘是前方厚后方薄,胸椎间盘则是后方厚前方薄。另外,椎间距离和椎间角度均存在个体差异。
4、腰椎病是一类以椎间盘退变为主导致的腰椎椎间盘突出,腰椎管、椎间孔、椎间隙狭窄,腰椎椎体滑脱、关节不稳,以及,腰椎周围软组织的急性及慢性损伤等一系列疾病群。胸椎也会出现类似以上疾患。
5、一般的胸腰椎病患者,可通过保守治疗有效控制症状、减少复发。但对于伴有先天性腰椎结构发育异常,神经根、脊髓严重压迫,或者,通过保守治疗症状无法得到有效改善的部分患者,则需行手术治疗。
6、手术治疗中的椎间融合术,是采用椎间融合器(cage)替代自体骨移植进行椎间融合的手术方法。融合器的作用,是填补病变的椎间盘被切除后留下的椎间间隙,恢复椎间距离,以及帮助病变椎间盘相邻两椎骨长成一个整体,使其不再活动。
7、椎间融合术包括开放施术和镜下施术。镜下施术对所用融合器的外形尺寸有苛刻的要求,例如,其宽×高可为10mm×8mm,以利通过内镜孔道实施植入。
8、研究表明,植入融合器的高度、位置与胸椎后凸、腰椎前凸的恢复以及术后预后有关,选择适当高度的融合器是胸腰椎融合术的关键步骤之一。过大的融合器不仅会导致椎间过度分离,增加相邻节段的异常应力,导致相邻节段变性的发生率增加,还会增加神经根伤害的机会。而使用高度过低的融合器,将无法恢复椎间高度、胸椎后凸和腰椎前凸,可能导致严重的并发症,如融合器迁移和融合失败。
9、融合器若按支撑高度可否调节来分类,可分为固定式和可调节高度两种。
10、可调节高度的融合器是在固定式的融合器的基础上被发明并用于临床的,其优势在于相对低的初始高度尺寸(例如8mm),使其可经内窥镜植入椎间,术中可对其高度在8mm~13mm的范围内进行随机调整,可适应患者椎间距离的个体差异,从而简化了手术程序。
11、可调节高度的融合器在能够较好的适应存在个体差异的、不同患者的椎间间隙的同时,还试图解决适应同样具有个体差异的椎间角度,其采用的技术方案,是在融合器与上下椎骨接触的、用于调节支撑高度构件的表面预制某一固定角度,这一技术解决方案此前已被固定式融合器采用。
12、然而,目前应用于临床的、可调节高度的椎间融合器的用于调节支撑高度的构件只能平动,不能生成适应患者存在个体差异的椎间角度,即腰椎前椎间高度大于后椎间高度所形成的的夹角,或胸椎后椎间高度大于前椎间高度所形成的夹角。
13、需要强调的是,所述“不能生成”的角度,主要是指以经前路(患者胸腹部植入)和后路(患者背部植入)的融合器,显见,该角度显现在人体站立时的前后方向(后续称为融合器的第一方向)与人体站立时的高度方向(后续称为融合器的第二方向)所确定的平面上。
14、前已述及,椎间距离和椎间角度因人而异,因此,融合器预制固定角度显然不具有普遍的适用性。
15、综上,目前应用于临床的可调节高度的椎间融合器不能按需形成和调整其上下支撑面间的夹角,而若融合器的角度与患者的椎间角度差异较大,会增加相邻椎骨与融合器接触的局部应力,不易形成稳定的腰椎前凸或胸椎后凸,影响治疗效果。因此,为可调节高度的椎间融合器增加随机调节角度功能,成为现有技术中有待解决的技术问题。
技术实现思路
1、本技术的实施例提供一种驱动传动改向支撑组件(下称组件)、一种可用于镜下的椎间融合器(下称融合器;含组件、器体等)及其旋具,以使融合器可以生成适应存在个体差异的椎间角度。
2、为清楚准确叙述,兹对前文已有出现、后文仍会出现的一些措辞做如下定义:
3、第一方向:所述融合器的长度方向,其与该融合器植入胸椎、腰椎间的方向重合,该融合器沿该方向的靠近施术者一端为近施术者端(简称近端);另一端为远施术者端(简称远端)。该方向在本技术的附图中标示为x。
4、第二方向:垂直于第一方向,系椎间融合器的支撑高度和患者椎间距离的方向,本技术融合器的支撑高度由第一改向支撑件和第二改向支撑件二者近端的第一支撑高度和远端的第二支撑高度共同决定。已知应用于临床的可用于镜下的椎间融合器(下称已知融合器)的支撑高度的最大调节值为5mm,调节后的最大支撑高度为13mm,本技术融合器的第一支撑高度和第二支撑高度中的至少之一,其最大调节值为6mm,调节后的最大支撑高度为14mm。由于本技术融合器可用于镜下植入,故其初始支撑高度即最小的支撑高度受内窥镜内径的限制,已知融合器的初始支撑高度为8mm,本技术依此设计。已知融合器显现于第一方向和第二方向确定平面的俯角是固定的、不可调节的,本技术融合器的该俯角是可调节的。第二方向在本技术的附图中标示为z方向。
5、第三方向:其垂直于第一方向和第二方向,是本技术融合器的宽度方向。具体地,该宽度是指器体或抵板的宽度。由于本技术融合器可用于镜下植入,其宽度受内窥镜内径的限制。已知融合器的宽度一般为10mm,本技术按10mm考虑。第三方向在本技术的附图中标示为y方向。
6、初始转动:使靠近近端布置的第一传动件产生向近端移动的、第一驱动件的第一次转动。该初始转动可为右旋,或可为左旋;使靠近远端布置的第二传动件产生向远端移动的、第二驱动件的第一次转动。该初始转动可为右旋,或可为左旋。
7、所述第一传动件和所述第二传动件只有沿第一方向相背或相向移动移动的自由度,故下文涉及该两传动件的移动时均省略“沿第一方向”限定。
8、所述第一传动件和所述第二传动件的相背移动,指所述第一传动件向所述近端移动,所述第二传动件向所述远端移动,该两传动件的距离增加;所述第一传动件和所述第二传动件的相向移动,指所述第一传动件向所述远端移动,所述第二传动件向所述近端移动,该两传动件的距离缩小。
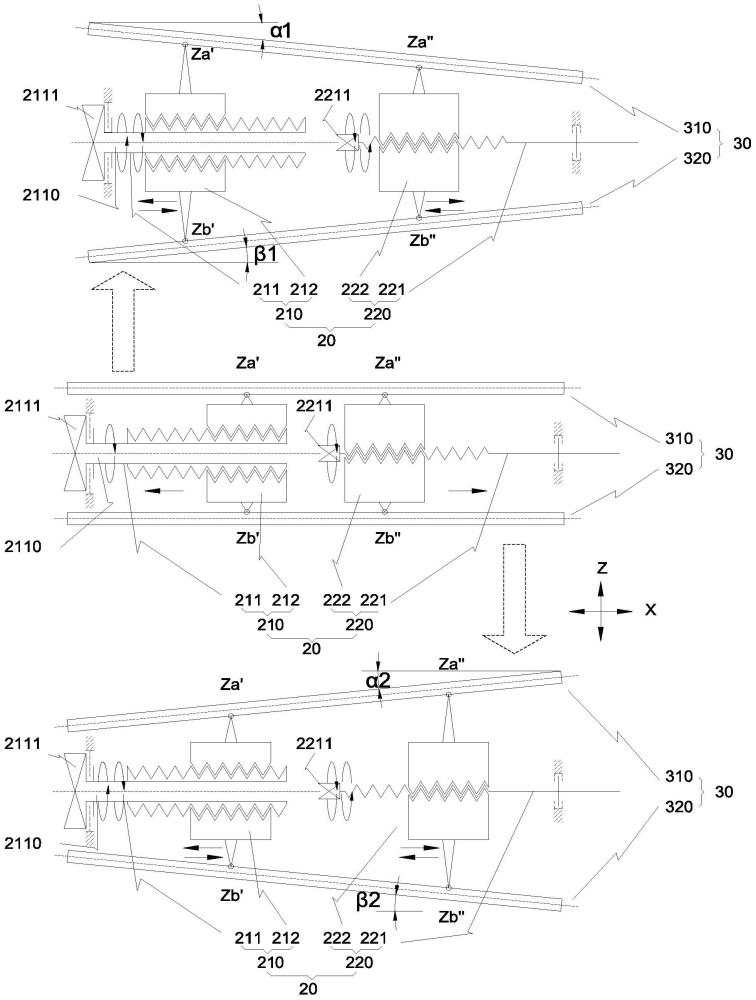
9、本技术的第1类实施例提供一种驱动传动改向支撑组件,包括:驱动传动组件,含第一驱动传动件和第二驱动传动件,所述第一驱动传动件,含彼此活动联接的第一驱动件和第一传动件,所述第二驱动传动件,含彼此活动联接的第二驱动件和第二传动件,所述第一驱动传动件和所述第二驱动传动件沿第一方向布置;该两驱动件在被所述器体等施加约束后只具定轴转动一个自由度,二者可被施术者使用所述旋具同步或不同步旋拧,产生同步或不同步定轴转动,分别驱动所述第一传动件和所述第二传动件,产生同步或不同步的移动;改向支撑组件,含第一改向支撑件和第二改向支撑件;所述第一改向支撑件和所述第二改向支撑件沿所述第二方向隔着所述驱动传动组件相对设置,所述第一传动件与所述第一改向支撑件和所述第二改向支撑件的近施术者端以下称近端活动联接,所述第二传动件与所述第一改向支撑件和所述第二改向支撑件的远施术者端以下称远端活动联接;所述第一驱动件的初始转动致所述第一传动件向近端移动,所述第一改向支撑件和所述第二改向支撑件的近端沿所述第二方向的第一支撑高度增加,产生第一增加值,和/或,所述第二驱动件的初始转动致所述第二传动件向远端移动,所述第一改向支撑件和所述第二改向支撑件的远端的第二支撑高度增加,产生第二增加值;所述初始转动引发的所述第一增加值和所述第二增加值可以同时或不同时产生、等值或不等值产生。所述第一驱动件和第二驱动件的初始转动的旋向可以相同或不同,二者的后续转动可以由左旋和/或右旋引发。所述第一改向支撑件和所述第二改向支撑件的支撑高度较大端为俯角生成端,所述俯角显现于所述第一方向和所述第二方向确定的平面。所述俯角生成端在患者椎间的位置,用于胸椎间朝向背部,用于腰椎间朝向腹部。
10、上述第1类实施例的一些示例中,可选地,所述第一改向支撑件和所述第二改向支撑件的近端和远端中的至少一端沿所述第二方向支撑高度的最大增加值可以是6mm,致:所述第一支撑高度和所述第二支撑高度中的至少一个的最大值为14mm。
11、上述第1类实施例的一些示例中,可选地,所述第一驱动件的后续转动致所述第一传动件向近端移动,所述第一支撑高度继续增加,或,所述第一驱动件的后续转动致所述第一传动件向远端移动,所述第一支撑高度降低。
12、上述第1类实施例的一些示例中,可选地,所述第二驱动件的后续转动致所述第二传动件向远端移动,所述第二支撑高度继续增加,或,所述第二驱动件的后续转动致所述第二传动件向近端移动,所述第二支撑高度降低。显见,所述第一驱动件和所述第二驱动件后续转动的结果,若致所述第一增加值和所述第二增加值相等,则实现了支撑高度的调整;若所述第一驱动件和所述第二驱动件的后续转动的结果,致所述第一增加值和所述第二增加值不相等,则所述第一增加值或所述第二增加值的数值较大端生成俯角,且该俯角显现在所述第一方向和所述第二方向确定的平面上。
13、上述第1类实施例的一些示例中,可选地,所述第一改向支撑件,包括:第一抵板,以及,分别与所述第一抵板固接、且相互固接的两个第一侧裙板和两个第一端裙板,所述第一侧裙板和所述第一端裙板位于所述第一抵板朝向所述第二改向支撑件侧,所述第一改向支撑件的近端和远端分别设第一联接部和第二联接部;所述第二改向支撑件,包括:第二抵板,以及,分别与所述第二抵板固接、且相互固接的两个第二侧裙板和两个第二端裙板,所述第二侧裙板和所述第二端裙板位于所述第二抵板朝向所述第一改向支撑件侧,所述第二改向支撑件的近端和远端分别设第三联接部和第四联接部;所述第一传动件分别与所述第一联接部和所述第三联接部滑动联接或铰接,所述第二传动件分别与所述第二联接部和所述第四联接部滑动联接或铰接。
14、上述第1类实施例的一些示例中,可选地,所述第一抵板和所述第二抵板,用于与患者病变椎间盘相邻的上下两椎骨的终板抵接,该两抵板中部均开有预植骨孔,供术前向组件中填充骨泥;该两抵板与所述椎骨终板的抵接面均设有增加附着力的凸起。
15、上述第1类实施例的一些示例中,可选地,所述第一传动件与所述第一联接部和所述第三联接部采用铰接、所述第二传动件与所述第二联接部和所述第四联接部采用铰接,其机械原理是扇形齿轮同步双摇臂机构。
16、具体地,所述第一联接部包括:位于所述第一抵板与所述第一侧裙板和所述第一端裙板在近端的结合部的第一轴座组,以及,一端与所述第一轴座组铰接、且另一端带有扇形齿轮的第一摇臂组;所述第二联接部包括:位于所述第一抵板与所述第一侧裙板和所述第一端裙板在远端的结合部的第二轴座组,以及,一端与所述第二轴座组铰接、且另一端带有扇形齿轮的第二摇臂组;所述第三联接部包括:位于所述第二抵板与所述第二侧裙板和所述第二端裙板在近端的结合部的第三轴座组,以及,一端与所述第三轴座组铰接、且另一端带有扇形齿轮的第三摇臂组;所述第四联接部包括:位于所述第二抵板与所述第二侧裙板和所述第二端裙板在远端的结合部的第四轴座组,以及,一端与所述第四轴座组铰接、且另一端带有扇形齿轮的第四摇臂组;所述第一传动件,分别经第一销轴与所述第一摇臂组的带有扇形齿轮的一端铰接、经第三销轴与所述第三摇臂组的带有扇形齿轮的一端铰接,所述第一摇臂组的扇形齿轮与所述第三摇臂组的扇形齿轮啮合,以实现所述第一摇臂组与所述第三摇臂组同步摆动,共同将所述第一传动件的移动,转换为所述第一支撑高度的第一增加值。同理,所述第二传动件,分别经第二销轴与所述第二摇臂组的带有扇形齿轮的一端铰接、经第四销轴与所述第四摇臂组的带有扇形齿轮的一端铰接,所述第二摇臂组的扇形齿轮与所述第四摇臂组的扇形齿轮啮合,以实现所述第二传动件的移动与所述第二支撑高度的第二增加值的转换。
17、上述第1类实施例的一些示例中,可选地,所述第一摇臂组和所述第三摇臂组的臂长和最大摆幅,致所述第一支撑高度的最大值为14mm,和/或,所述第二摇臂组和所述第四摇臂组的臂长和最大摆幅,致所述第二支撑高度的最大值为14mm。
18、上述第1类实施例的一些示例中,可选地,所述第一传动件与所述第一联接部和所述第三联接部采用滑销滑槽的滑动联接、所述第二传动件与所述第二联接部和所述第四联接部采用滑销滑槽的滑动联接,其机械原理是楔块改向机构。所述第一传动件和所述第二传动件为主动楔块,可分别将所述第一驱动件和所述第二驱动件的定轴转动转换为二者移动,再将该移动经各联接部的滑槽转换为所述第一改向支撑件和所述第二改向支撑件的所述近端和远端的支撑高度的所述第一增加值和所述第二增加值。
19、具体地,所述第一联接部包括设于所述第一侧裙板的近所述近端的第一滑槽组,所述第二联接部包括设于所述第一侧裙板的近所述远端的第二滑槽组,所述第三联接部包括设于所述第二侧裙板的近所述近端的第三滑槽组,所述第四联接部包括设于所述第二侧裙板的近所述远端的第四滑槽组;所述第一滑槽与所述第二滑槽位于同一平面,所述第三滑槽与第四滑槽位于同一平面。所述第一滑槽组和所述第二滑槽组靠近所述第一抵板的端部相互靠近、远离所述第一抵板的端部相对远离;所述第三滑槽组和所述第四滑槽组靠近所述第二抵板的端部相互靠近、远离所述第二抵板的端部相对远离;所述第一侧裙板的边缘至少设置一个朝向所述第二抵板的第一突出部,所述第一滑槽组和所述第二滑槽组中的至少一组的远离所述第一抵板的端部位于所述第一突出部,所述第一突出部用于加长所述第一滑槽组和/或第二滑槽组的长度,以增加所述第一滑销和/或第二滑销的滑动距离,实现所述第一增加值和/或第二增加值最大可达6mm;所述第二侧裙板的边缘至少设置一个朝向所述第一抵板的第二突出部,所述第三滑槽组和所述第四滑槽组中的至少一组的远离所述第二抵板的端部位于所述第二突出部,所述第二突出部的作用与所述第一突出部的作用相同;所述第一传动件,分别经所述第一滑销与所述第一滑槽组滑动联接、经所述第三滑销与所述第三滑槽组滑动联接;所述第二传动件,分别经所述第二滑销与所述第二滑槽组滑动联接、经所述第四滑销与所述第四滑槽组滑动联接。
20、上述第1类实施例的一些示例中,可选地,所述第一滑销和所述第三滑销在所述第一滑槽组和所述第三滑槽组中的最大滑动距离,致所述第一支撑高度最大值为14mm,和/或,所述第二滑销和所述第四滑销在所述第二滑槽组和所述第四滑槽组中的最大滑动距离,致所述第二支撑高度最大值为14mm。
21、上述第1类实施例的一些示例中,可选地,所述第一改向支撑件的两个所述第一侧裙板外侧宽度的公称尺寸,与所述第二改向支撑件的两个所述第二侧裙板外侧宽度的公称尺寸相同;至少一组所述第一突出部和所述第二突出部在所述第一方向上错位布置,所述错位布置,使所述第一侧裙板和所述第二侧裙板沿所述第二方向的整体高度不变、局部高度增加;所述第一滑槽组、所述第二滑槽组、所述第三滑槽组以及所述第四滑槽组均包括有底凹槽。
22、上述第1类实施例的一些示例中,可选地,所述第一改向支撑件的两个所述第一侧裙板外侧宽度的公称尺寸,与所述第二改向支撑件的两个所述第二侧裙板内侧宽度的公称尺寸相同,且所述第一改向支撑件的两个所述第一侧裙板的外侧与所述第二改向支撑件的两个所述第二侧裙板的内侧滑动联接,在生成所述第一增加值和/或所述第二增加值时相互滑动;或,所述第二改向支撑件的两个所述第二侧裙板外侧宽度的公称尺寸,与所述第一改向支撑件的两个所述第一侧裙板内侧宽度的公称尺寸相同,且所述第二改向支撑件的两个所述第二侧裙板的外侧与所述第一改向支撑件的两个所述第一侧裙板的内侧滑动联接,滑动副工作情况同上;所述第一突出部和所述第二突出部在所述第一方向上对应布置、沿第三方向错位布置;所述第一滑槽组、所述第二滑槽组、所述第三滑槽组以及所述第四滑槽组均包括贯穿槽。
23、上述第1类实施例的一些示例中,可选地,远端为所述俯角生成端:所述第一联接部包括位于所述第一抵板与所述第一侧裙板和所述第一端裙板在近端的结合部的第一轴座组,以及,一端与所述第一轴座组铰接、且另一端带有扇形齿轮的第一摇臂组;所述第二联接部包括设于所述第一侧裙板的近所述远端的第二滑槽组;所述第三联接部包括位于所述第二抵板与所述第二侧裙板和所述第二端裙板在近端的结合部的第三轴座组,以及,一端与所述第三轴座组铰接、且另一端带有扇形齿轮的第三摇臂组;所述第四联接部包括设于所述第二侧裙板的近所述远端的第四滑槽组;所述第一传动件,分别经第一销轴与所述第一摇臂组的带有扇形齿轮的一端铰接、经第三销轴与所述第三摇臂组的带有扇形齿轮的一端铰接,所述第一摇臂组的扇形齿轮与所述第三摇臂组的扇形齿轮啮合;所述第二传动件,分别经第二滑销与所述第二滑槽组滑动联接、经第四滑销与所述第四滑槽组滑动联接;所述第二滑销和第四滑销在所述第二滑槽组和所述第四滑槽组中的最大滑动距离,致所述第二支撑高度的最大值为14mm。
24、上述第1类实施例的一些示例中,可选地,近端为所述俯角生成端:将前一自然段所述远端为所述俯角生成端的所述第一联接部、所述第三联接部的结构形式与所述第二联接部、所述第四联接部的结构形式对调,同时将所述第一驱动传动件和所述第二驱动传动件的结构形式对调,即得近端为所述俯角生成端;所述第一滑销和第三滑销在所述第一滑槽组和所述第三滑槽组中的最大滑动距离,致所述第一支撑高度的最大值为14mm。
25、在上述实施例的一些示例中,所述第一驱动件设有轴向通孔,该轴向通孔用于供所述旋具的第二旋头通过,以旋拧所述第二驱动件和施术中注入骨泥。所述轴向通孔设有第一旋拧部,所述第二驱动件设有与所述第一旋拧部同轴的第二旋拧部。
26、本技术的第2类实施例提供一种器体,可以包括:
27、沿所述第二方向贯通的空腔、沿所述第一方向顺序布置的近端端部和远端端部,以及沿所述第三方向分列、联接所述近端端部和所述远端端部的一对侧板,
28、所述近端端部设第五联接部,所述第五联接部与所述第一驱动件活动联接;
29、所述远端端部设第六联接部,所述第六联接部与所述第二驱动件活动联接,
30、所述驱动传动改向支撑组件,除其所述第一抵板和所述第二抵板外的其它部分均设置于或可缩入所述器体空腔中,其中,所述第一传动件和所述第二传动件沿所述第一方向布置于所述空腔中,所述空腔为所述第一改向支撑件和所述第二改向支撑件提供运动导向和空间定位支撑。
31、上述第2类实施例的一些示例中,可选地,所述器体空腔,其位于所述俯角生成端的端面的、沿所述第二方向的两边缘,分别设置与所述第一端裙板和所述第二端裙板滑动联接的撑块;所述器体空腔,其位于与所述俯角生成端相对的仰角生成端的端面的、沿所述第二方向的两边缘,分别设置与所述第一端裙板和所述第二端裙板滑动和/或滚动联接的边缘柱面;所述器体空腔,其位于所述俯角生成端的端面沿所述第二方向的高度,大于其位于与所述俯角生成端相对的仰角生成端的端面沿所述第二方向的高度。
32、具体地,所述第一改向支撑件、第二改向支撑件的各两端端裙板外侧间沿第一方向的距离a的公称尺寸,与初始状态的各两端端裙板与撑块、边缘柱面的接触点间沿第一方向距离的公称尺寸相同;该a小于生成俯角状态的各两端端裙板与撑块、边缘柱面的接触点间的直线距离b的公称尺寸;初始状态的各两端端裙板与撑块可形成接触点a、与边缘柱面可形成接触点b,接触点a与接触点b沿第二方向的距离c与a、b的关系是c2≈b2-a2,即:c≈(b2-a2)(1/2)。
33、本技术的第3类实施例提供一种可用于镜下的椎间融合器(下称融合器),可以包括:前述第1类实施例的驱动传动改向支撑组件和前述第2类实施例的器体。
34、本技术的第4类实施例提供一种用于调节融合器的支撑高度和俯角角度的旋具,可以包括:第一旋拧件和第二旋拧件,所述第一旋拧件和所述第二旋拧件同轴布置,所述第一旋拧件的远端设有第一旋头,所述第一旋头与各第1类实施例的所述第一旋拧部适配,所述第二旋拧件的远端设有第二旋头,所述第二旋头与各第1类实施例第二旋拧部适配;所述第一旋拧件与所述第二旋拧件可被同时旋拧并同时发生旋向相同或相反的转动,或者,所述第一旋拧件与所述第二旋拧件可被分别旋拧而各自转动;所述第二旋头与所述第一旋头之间的距离和所述第二旋拧部与所述第一旋拧部之间的距离匹配。
35、可选地,上述第1类实施例与第2类实施例交叉组合的多种融合器优选实施例,均可实现下述有益效果:
36、1).可生成和调节角度:本技术的所述第一改向支撑件和所述第二改向支撑件的所述近端和所述远端,各由所述第一传动件和所述第二传动件提供一组大小相等方向相反的支撑力,且该两传动件分别由相互独立但可同步操作或分别操作的所述第一驱动件和所述第二驱动件驱动,致该两传动件对所述第一改向支撑件和所述第二改向支撑件的近端和远端的各一组支撑力的两作用点可随所述第一传动件和所述第二传动件移动而沿所述第二方向改变距离;具体地:所述第一传动件向近端移动,所述第一改向支撑件和所述第二改向支撑件近端的两个支撑力的作用点间的距离增加,即所述第一支撑高度增加。反之降低;所述第二传动件向远端移动,所述第一改向支撑件和所述第二改向支撑件远端的两个支撑力的作用点间的距离增加,即所述第二支撑高度增加。反之降低。
37、进一步地,若:所述第一支撑高度与所述第二支撑高度相等,则融合器的支撑高度被调节;所述第一支撑高度大于所述第二支撑高度,则融合器的近端生成俯角;所述第二支撑高度大于所述第一支撑高度,则融合器的远端生成俯角;该两支撑高度的差值改变,则融合器俯角的角度被调节。反观已知融合器,其只有一组驱动传动组件,只能为所述两改向支撑件提供一组,或形式上不是一组而实质仍是一组的支撑力,其两改向支撑件沿第二方向的移动是平动,无法生成俯角。本技术在所述第一改向支撑件和所述第二改向支撑件的近端和远端中的任意一端,生成显现于所述第一方向和所述第二方向确定的平面、且与存在个体差异的椎间间隙和椎间角度相适配的俯角,从而实现使融合器与存在个体差异的椎间间隙的角度相适配的角度调节,可解决已知融合器存在的技术问题,提升融合器的治疗效果。
38、2).最大支撑高度弥补已知融合器的欠缺:资料显示,人体椎间距离为8至14mm,已知融合器的支撑高度为8至13mm,支撑高度的最大增加值为5mm。本技术所述第一至第四联接部采用双摇臂同步机构和/或带错位凸起的滑槽楔块机构和/或沿第三方向重叠的滑槽楔块机构,使所述俯角生成端的支撑高度最大增加值达6mm,较已知融合器的支撑高度最大增加值5mm提高20%,本技术融合器的最大支撑高度达14mm,可以满足所有患者的需要。
39、3).融合器高度增加后的整体稳定性不降低:本技术的融合器处于初始状态时,所述第一驱动件位距所述近端的最大距离处,所述第二驱动件位距所述远端的最大距离处,即分别通过第一传动件和第二传动件作用于所述第一改向支撑件和所述第二改向支撑件的所述远端和所述近端的两组支撑力间的距离处于最小处,所述两传动件相背移动,二者间距增大,所述第一改向支撑件和所述第二改向支撑件的所述第一支撑高度和所述第二支撑高度的增加,与所述两传动件距离的增加正相关,即两支点间距增大,支撑高度才增大,所以,融合器高度增加后其整体稳定性不降低。若采用与本技术相反的设置,即所述两传动件相向移动,两支点间距缩小,支撑高度增大,则其融合器高度增加后整体稳定性降低。
40、4).融合器高度增加后后植骨空间加大:原因同上。
41、5).因为本技术所述第一改向支撑件的所述第一侧裙板和/或所述第二改向支撑件的所述第二侧裙板的外侧与器体空腔的侧壁滑动配合,器体空腔的所述融合器俯角生成端端面沿所述第二方向的两边缘,分别设有撑块;所述融合器仰角生成端端面沿所述第二方向的两边缘,分别设有边缘柱面,所述第一改向支撑件的所述第一端裙板和所述第二改向支撑件的所述第二端裙板的外侧与所述撑块或边缘柱面滑动和/或滚动配合,且所述融合器俯角生成端端面沿所述第二方向的高度,大于所述融合器仰角生成端端面沿所述第二方向的高度,所以本技术中的所述器体可以为所述第一改向支撑件和所述第二改向支撑件提供移动导向和协同驱动传动件对该两改向支撑件做空间六点定位,所述融合器的稳定性得以增强。
本文地址:https://www.jishuxx.com/zhuanli/20241118/329463.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表