一种C-V2X自治模式下考虑数据包丢包的车辆编队设计方法
- 国知局
- 2024-11-19 09:47:01
本发明属于蜂窝车联网与智能网联车辆,具体涉及一种在蜂窝车联网(c-v2x(cellular-vehicle to everything))自治模式下考虑数据包丢包的车联编队设计方法。
背景技术:
1、作为自动驾驶的重要应用场景之一,车辆编队具有缓解交通拥堵,改善交通效率,提高驾驶安全性和改善燃油经济性的显著优势。车辆编队由一组运动模式相似的车辆组成,通常包括一辆领航车辆和多个跟随车辆。车辆编队中的每辆跟随车需跟随前方车辆并与其前方车辆保持恒定的车辆间距。为了保持车辆编队的稳定运行,车辆编队成员车需要从其他编队成员处收集车辆的运动状态信息(位置、速度、加速度等)。在早期的研究中,车辆的运动状态信息通过车载传感器获取。由于雷达等车载传感器的感知范围有限,编组成员车只能获取与其最为相邻两辆车的信息,即其前车与后车。随着v2x技术的发展,车辆编组成员不仅可以与其最相邻的两辆车交换信息,还可以与分布在它前方的任意数量的编组成员车(不超过队列规模)交换信息。受益于v2v通信,车辆编队可以减小车头时距,进一步提高道路容量,实现高效的编队策略。车辆编队的通信主要由ieee 802.11p或蜂窝车联网实现。其中,蜂窝车联网由于其低时延,高可靠性,灵活的与网络融合的工作模式等显著的技术优势而受到学术界及工业界的广泛关注并已逐渐成为国际主流的车联网通信标准。
2、然而,信道衰减和干扰引起的数据包丢包在车联网通信中是不可避免的,这将影响车辆编队的稳定性。在目前的研究工作中,通常利用gilbert-elliott模型来建模车联网通信中突发性的数据包丢包。在c-v2x自主模式中,3gpp标准提出引入一种基于感知的半持续调度的分布式资源调度算法,允许车辆自主保留无线电资源。这种分布式的资源调度算法将面临数据包选择冲突错误和半双工传输错误等。采用gilbert-elliot模型不能准确描述c-v2x自主模式下的数据包丢失。此外,gilbert-elliot模型无法建模数据包成功交付概率和编队车辆间距之间的关系。因此,需要一个理论分析模型,刻画c-v2x自主模式下数据包成功交付概率和编队车辆间距之间的关系。进一步,需要研究c-v2x自主模式下数据包丢失对车辆编队队列稳定性的影响,推导在保证队列稳定性的条件下,最小车头时距的表达式,为实现高效的车辆编队策略提供设计指导。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的一种c-v2x自治模式下考虑数据包丢包的车辆编队设计方法解决了上述问题。
2、为了达到上述发明目的,本发明采用的技术方案为:一种c-v2x自治模式下考虑数据包丢包的车辆编队设计方法,包括以下步骤:
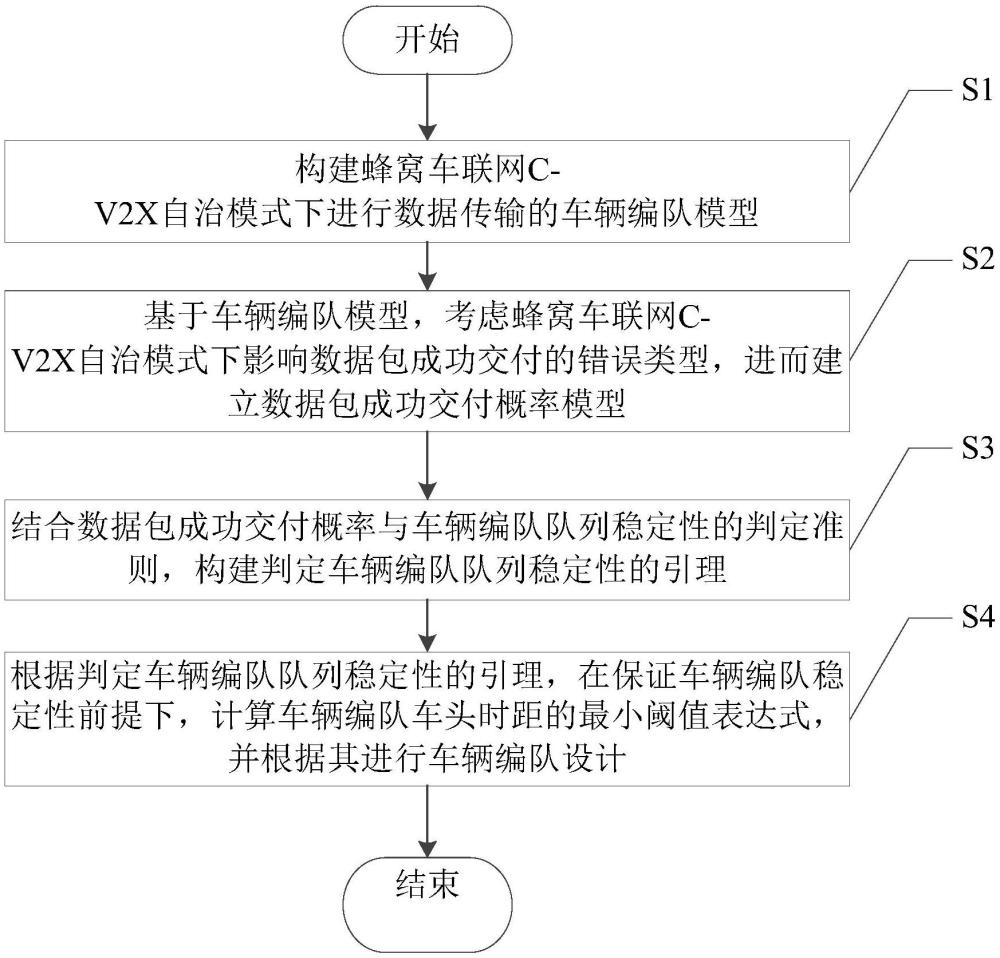
3、s1、构建蜂窝车联网c-v2x自治模式下进行数据传输的车辆编队模型;
4、s2、基于车辆编队模型,考虑蜂窝车联网c-v2x自治模式下影响数据包成功交付的错误类型,进而建立数据包成功交付概率模型;
5、s3、结合数据包成功交付概率与车辆编队队列稳定性的判定准则,构建判定车辆编队队列稳定性的引理;
6、s4、根据判定车辆编队队列稳定性的引理,在保证车辆编队稳定性前提下,计算车辆编队车头时距的最小阈值表达式,并根据其进行车辆编队设计。
7、进一步地,所述步骤s1中,构建车辆编队模型,包括依次构建车辆纵向动力学模型、设计车辆编队的间距策略和跟车策略,以及设计车辆编队的反馈控制律。
8、进一步地,采用线性三阶方程描述车辆编队的运动学特征进而构建车辆纵向动力学模型,其表达式为:
9、
10、式中,pi(t)表示第i辆车在t时刻的位置,vi(t)表示第i辆车在t时刻的速度,ai(t)表示第i辆车在t时刻的加速度,τ表示时间阻滞常数,ui(t)表示控制输入,表示对位置信息的求导,表示对速度信息的求导,表示对加速度信息的求导;
11、设计的车辆编队的间距策略为:采用常车头时距策略描述第i个编组成员与其前面的第l辆编组成员车的期望间距,其表达式为:
12、
13、式中,di,i-l(t)表示第i个编组成员与其前面的第l辆编组成员车的期望间距ds表示期望静止距离,hw表示车头时距,vk(t)表示第k个编队成员车的速度信息;
14、设计的车辆编队的跟车策略为:采用多前车跟随mpf策略,即每辆编组成员车可通过v2v通信获得其前方m辆编组成员的信息;
15、设计的车辆编队反馈控制律为:
16、考虑数据包的交付状态,当与第i个编组成员车通信的前车数目为1时,反馈控制律描述为:
17、ui(t)=-βi,i-1(t)ka(ai(t)-ai-1(t))-kv(vi(t)-vi-1(t))
18、-kp(pi(t)-pi-1(t)+hwvi(t)+ds)
19、考虑数据包的交付状态,当与第i个编组成员车通信的前车数目大于1时,反馈控制律描述为:
20、
21、式中,βi,i-1(t)表示第i个编组成员车与第i-1个成员车之间数据包交付状态的二进制变量,ka表示加速度增益,kv表示速度增益,kp表示位置增益;其中,βi,i-1(t)/βi,i-l(t)代表第i个编组成员车与第i-1/i-l个成员车之间数据包交付状态的二进制变量,当第i-1/i-l个编组成员车的数据包成功被第i个成员接收,βi,i-1(t)/βi,i-l(t)的值为1,否则,βi,i-1(t)/βi,i-l(t)值为0。
22、进一步地,所述步骤s2中,影响数据包成功交付的错误类型包括资源选择冲突错误psinr、半双工传输错误phalf,接收信号功率低于感知功率阈值导致的错误psen与传播效应导致的错误psnr;
23、建立的数据包成功交付概率模型为:
24、
25、式中,x表示发送端编组成员车与接收端编组成员车之间的传输距离。
26、进一步地,所述步骤s3中,车辆编队队列稳定性的判定准则为:e{||h(s)||∞}≤1,其中,h(s)表示当与第i个编组成员车通信的前车数目m为1时,对分析蜂窝车联网c-v2x自治模式下数据包丢包对车辆编队队列稳定性的影响时的间距误差控制方程进行两边取均值并做拉普拉斯变换得到的函数式中的传递函数,e{·}表示对其取均值;
27、其中,间距误差控制方程为:
28、
29、式中,ei(t)表示间距误差,ei(t)=pi(t)-pi-1(t)+hwvi(t)+ds,表示对间距误差求一阶导数,表示对间距误差求二阶导数,表示对间距误差求三阶导数;
30、对间距误差控制方程进行两边取均值并做拉普拉斯变换得到的函数式为:
31、ε{ei(s)}=ε{h(s)ei-1(s)}
32、式中,ei(s)与ei-1(s)表示ei(t)和ei-1(t)的拉普拉斯变换;
33、传递函数h(s)的表达式为:
34、
35、式中,s表示复数。
36、进一步地,判定车辆编队队列稳定性的引理为:
37、对于蜂窝车联网c-v2x自治模式下考虑数据包丢包的编队间距误差系统,当满足下列条件之一时,车辆编队的随机稳定性得到保证:
38、
39、式中,γ2=kphw(kv+kphw)+kvkphw-kv2-2kp,δd=γ22-4γ1τ,表示数据包成功交付概率。
40、进一步地,所述步骤s4中,当采用mpf跟车策略(m=1)的均质车辆编队系统时,保证车辆编队队列稳定性的车头时距的最小阈值表达式为:
41、
42、进一步地,所述步骤s4中,当采用mpf跟车策略(m>1)的均质车辆编队系统时,保证车辆编队队列稳定性的车头时距的最小阈值表达式为:
43、
44、本发明的有益效果为:
45、(1)本发明考虑采用c-v2x自治模式进行数据传输的车辆编队场景,c-v2x自治模式可以实现在无蜂窝网络覆盖场景下,车辆编队自主进行资源选择。
46、(2)本发明提出的理论分析模型能够准确描述c-v2x自治模式下数据包成功交付概率与车辆编队车间间距之间的关系。
47、(3)本发明推导出的在保证车辆编队队列稳定性条件下最小车头时距的阈值表达式为实现高效的编队策略提供设计指导,即通过增加通信的前车数目与提高数据包的成功交付概率,可以使车辆编队减小车头时距并提高道路容量。
本文地址:https://www.jishuxx.com/zhuanli/20241118/330216.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表