无轨道的移动式测量焦炉炉顶看火孔温度的装置及方法
- 国知局
- 2024-11-19 09:47:06
本发明属于焦炉自动测温,尤其涉及无轨道的移动式测量焦炉炉顶看火孔温度的装置及方法。
背景技术:
1、焦炉炉顶看火孔的自动测温采用移动式的自动测温是大势所趋。但是,目前制约移动式自动测温推广应用的最大障碍在于如何准确测量出看火孔底部鼻梁砖处第一测温点的温度。根据焦炉炉型和炭化室高度不同,焦炉炉顶移动式自动测温距离看火孔底部鼻梁砖处第一测温点的高度约6-8米,而看火孔的直径较小,通常在140-170mm左右,由于焦炉炉顶地砖或在炉顶铺设的轨道由于热胀冷缩等等多种因素会导致变形或不平,焦炉的这种结构和工艺特点决定了移动式自动测温在焦炉炉顶即使发生很小的偏移,都无法准确测出第一测温点的温度,这是目前困扰移动式自动测温的最大难点。
2、发明人对此进行研究,且提出相关的测温装置和方法。其中提出公开号为cn115265791b的发明专利,专利名为一种区分焦炉单双号看火孔自动精准测温的装置和方法,申请并获得了国家发明专利授权,该授权发明专利能够在一定程度上克服炉顶不平或轨道变形带来的影响,从而实现准确测温。进一步的,发明人还提出公开号为cn117516724a的发明专利,专利名为受限空间内自动测量焦炉下降气流看火孔的系统和方法,该方法提出测温传感器经由垂直稳定器保证垂直的结构和方法。但是,上述公开的发明专利均是采用轨道移动式的自动测温,考虑到某些焦炉炉型安装测温轨道受限甚至无法安装轨道,或者在标准火道及标准火道附近的火道安装轨道受限甚至无法安装轨道,当测量炉头温度或横排温度时,更是无法安装轨道。因此无轨道的移动式自动测温无论是投资还是运行维护以及操作的广泛适应性等就显得极具优势。
3、同时,如何精准定位无轨道的移动式自动测温装置上携带的测温仪恰好位于每一个看火孔底部鼻梁砖处第一测温点的上方同样非常重要,在此基础上才能保证处于垂直状态的测温仪准确测温。为此,需要对焦炉炉顶移动自动测温的技术和方法进一步的创新,在满足精准定位的同时确保测温仪垂直,在各种复杂的焦炉炉顶工况条件下都能更好的完成自动测温工作。
4、本发明提出一种无轨道的移动式测量焦炉炉顶看火孔温度的装置及方法,不仅能够以无轨道的移动式自动测温装置实现单双号一体式看火孔盖依次分别自动开启和自动关闭的功能,还能够精准定位测温仪位于开启的一体式看火孔盖的中央并保证测温仪处于垂直状态,从而准确测出当前开启的看火孔底部中央的温度,此外不局限于直行温度的测温工作,还能够实现炉头温度和横排温度的测量。
技术实现思路
1、本发明的目的在于提供无轨道的移动式测量焦炉炉顶看火孔温度的装置及方法,以解决上述背景技术中提出的现有技术中缺少无轨道的移动式焦炉炉顶看火孔的自动测温技术,且如何精准定位无轨道的移动式自动测温装置上携带的测温仪等问题。
2、为实现上述目的,本发明采用以下技术方案实现:
3、在本发明中,第一方面提出了无轨道的移动式测量焦炉炉顶看火孔温度的装置,包括一体式看火孔盖、测温机器人;所述一体式看火孔盖包括基座、翻盖和转轴,所述基座安装于焦炉炉顶地面的看火孔上,所述翻盖通过转轴安装于基座上;所述翻盖靠近转轴的一侧延伸有按压板,所述翻盖和按压板分别位于转轴两侧;所述一体式看火孔盖用于对看火孔进行关闭;
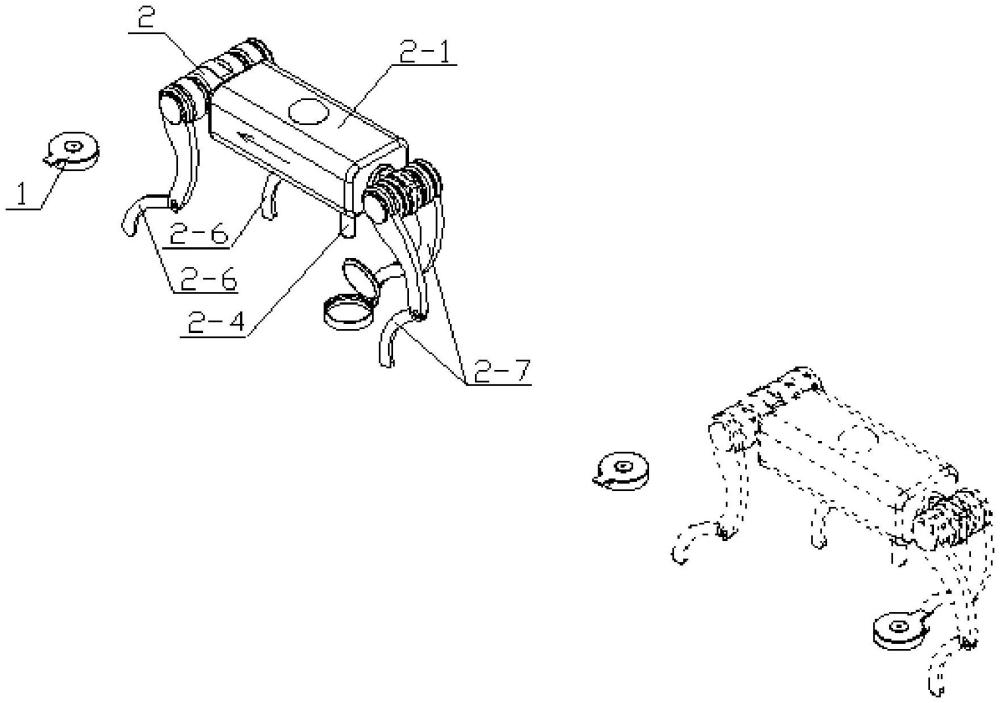
4、所述测温机器人包括本体、肢体、垂直稳定器和测温仪,所述肢体设有m个,m≥2,所有肢体连接在本体上,所述测温仪通过垂直稳定器与本体进行连接;所述测温机器人用于在焦炉炉顶地面上行进测温;行进路线,在测量直行和横排温度时,与看火孔的中心点连线平行,在测量炉头温度时,测温机器人非直线行进,而为前进测温,测温完毕后退,两次转弯90°,再前进测温,如此循环;
5、行进过程中测温机器人的任意一个肢体对按压板踩踏按压,控制翻盖翻转打开看火孔,同时利用测温仪对看火孔的中心点进行测温;行进过程中保持该肢体依次对所有单号或双号看火孔上的按压板进行踩踏按压,行进踩踏开盖时方向与转轴平行。
6、优选地,所有单号或双号看火孔上安装的一体式看火孔盖的翻盖开盖的朝向一致;双号看火孔上的一体式看火孔盖为单号看火孔上的一体式看火孔盖旋转180°后安装。
7、优选地,所有单双号看火孔上安装的所述一体式看火孔盖朝向一致。
8、优选地,所述测温机器人还包括有测距仪,所述测距仪设有n个,n≥1;所述测距仪连接在本体上,或连接在测温仪的外侧(测距仪与测温仪通过一个垂直稳定器连接在本体上);
9、测温机器人的任意一个肢体对按压板踩踏按压开盖时,所述测温仪位于基座的正投影的中心处,所有测距仪位于翻盖的正投影的周边上,且不位于翻盖的正投影中转轴所在位置。
10、优选地,所述基座安装于焦炉炉顶地面的看火孔上时高出焦炉炉顶地面,所述转轴安装于基座的外壁上,所述翻盖覆盖在基座上方;所述翻盖向上开启的角度小于90°。
11、作为进一步的优化,所述按压板与所述转轴之间的距离小于所述基座的高度。
12、作为进一步的优化,所述一体式看火孔盖为圆筒形,所述测距仪的数量设置两个,其中位于所述测温仪前方的称为第一测距仪,位于所述测温仪后方的称为第二测距仪,所述第一测距仪和所述第二测距仪以所述测温仪为圆心分布在圆周上,所述第一测距仪和所述第二测距仪与所述测温仪之间的水平距离均等于所述一体式看火孔盖的半径。
13、优选地,所述基座安装于焦炉炉顶地面的看火孔上时与焦炉炉顶地面齐平,所述基座内嵌于看火孔中,所述基座内壁连接有盖面,所述盖面表面上开设有转动槽,所述转轴安装于转动槽内,所述盖面上开设有翻盖孔和按压孔,所述翻盖和按压板分别与翻盖孔和按压孔的轮廓相契合;所述翻盖孔内壁下方连接有支撑翻盖的支撑测距小环台。
14、作为进一步的优化,所述一体式看火孔盖的按压板面积尽可能的大,利于所述测温机器人踩踏下压从而打开所述翻盖。
15、作为进一步的优化,所述一体式看火孔盖为圆筒形,所述测距仪的数量设置两个,其中位于所述测温仪前方的称为第一测距仪,位于所述测温仪后方的称为第二测距仪,所述第一测距仪和所述第二测距仪以翻盖中心为圆心分布在圆周上,所述第一测距仪和所述第二测距仪与翻盖中心之间的水平距离均等于翻盖中心的半径。
16、优选地,所述肢体设有四个,四个肢体分为两对肢体,一对肢体的肢体间距大于另一对肢体的肢体间距;两对肢体分别安装在本体的前后侧;肢体间距小的一对肢体中肢体用于踩踏翻盖;
17、当肢体间距小的一对肢体位于测温机器人行进方向的前侧时,所述测温仪位于测温机器人的前部;当肢体间距小的一对肢体位于测温机器人行进方向的后侧时,所述测温仪位于测温机器人的后部。
18、优选地,所述肢体设有四个,四个肢体分为两对肢体,两对肢体的肢体间距相同;两对肢体分别安装在本体的前后侧;其中一对肢体的相对一侧均安装有内小肢,所述内小肢用于踩踏翻盖;
19、当安装有内小肢的一对肢体位于测温机器人行进方向的前侧时,所述测温仪位于测温机器人的前部;当安装有内小肢的一对肢体位于测温机器人行进方向的后侧时,所述测温仪位于测温机器人的后部。
20、优选地,所述肢体设有四个,四个肢体分为两对肢体,两对肢体的肢体间距相同;两对肢体分别安装在本体的前后侧;
21、所述测温仪通过垂直稳定器安装在本体左侧面或右侧面;与测温仪位于同一侧的任意一个肢体用于踩踏翻盖。
22、优选地,测温机器人采用测温机器狗,肢体设有四个,四个肢体分为一对前肢和一对后肢,内小肢为内后肢或内前肢。需要特别指出的是,所述前肢和所述后肢的前与后是相对概念,以所述测温机器狗前进的方向为基准,位于所述测温机器狗前部的称为所述前肢,位于所述测温机器狗后部的称为所述后肢。
23、在本发明中,第二方面提出了采用上述装置进行的无轨道的移动式测量焦炉炉顶看火孔温度的方法,包括以下步骤:
24、s1、焦炉换向后发出测温指令,测温机器人在指定位置根据测温指令按照一定的步幅前进,测距仪向下测量距离;前进过程中用于踩踏的肢体能够踩踏按压板从而控制翻盖翻转开启看火孔;
25、s2、翻盖开启后,测距仪持续向下测量距离,当判断测温仪处于看火孔的中心点所在竖直线上时,垂直稳定器使测温仪处于垂直状态,测温仪测出当前开启的看火孔底部中心点温度;
26、s3、测温机器人继续移动,当踩踏按压板的该肢体与一体式看火孔盖脱离接触时,翻盖在重力作用下复位关闭;
27、s4、测温机器人沿前进路线依次测量出所有下降气流看火孔的中心点温度;
28、s5、焦炉再次换向后,测温机器人根据测温指令,按照s1-s4依次测量出所有原上升气流看火孔的中心点温度,原上升气流看火孔在再次换向后为下降气流看火孔。
29、优选地,所述s2中判断测温仪处于看火孔的中心点所在竖直线上,具体如下:
30、当测距仪测出的距离为其与基座上翻盖边沿支撑位置之间的距离时,查看测温仪测出的温度;
31、若此时测温仪测出的温度远高于焦炉炉顶地面的温度时,则判断测温仪位于开启的一体式看火孔盖的中央;
32、若此时测温仪测出的温度为焦炉炉顶地面的温度时,控制本体向前进行微小移动,直至所述测距仪测出的距离再次为其与基座上翻盖边沿支撑位置之间的距离时,判断测温仪位于开启的一体式看火孔盖的中央。
33、具体地,基座上翻盖边沿支撑位置是指:当基座安装于焦炉炉顶地面的看火孔上时高出焦炉炉顶地面,该基座上翻盖边沿支撑位置为基座的顶部,基座的顶部对翻盖边沿进行支撑;当基座安装于焦炉炉顶地面的看火孔上时与焦炉炉顶地面齐平且基座内嵌于看火孔中,该基座上翻盖周边支撑环为支撑测距小环台,支撑测距小环台对翻盖边沿进行支撑。
34、优选地,当测距仪数量为一个时,测温机器人行进过程中控制使测温仪位于看火孔的中线所在竖直面上。
35、与现有技术相比,本发明的有益效果是:
36、(1)、本发明中利用测温机器人的自身重量,当测温机器人的任意一肢踩踏一体式看火孔盖上的按压板时,在测温机器人自身重量的下压下开启一体式看火孔盖,测温完毕,一体式看火孔盖在重力的作用下自动关闭,结构简单,无需专门的开盖机构。且通过利用测温机器人,本发明无需安装轨道,也能完成自动开盖、精准定位、准确测温、自动关盖、且只测下降气流看火孔等功能。
37、(2)、本发明中利用所有单号一体式看火孔盖的安装朝向一致,所有双号一体式看火孔盖旋转180°安装,可以实现只依次踩踏并开启所有单号看火孔盖或依次踩踏并开启所有双号看火孔盖,实现了只开启下降气流看火孔盖并精准定位准确测温,避免了上升气流看火孔内喷出的火焰的炙烤,从而延长使用寿命。
38、(3)、本发明中巧妙设计了开盖原理相同的两种一体式看火孔盖,无论是高出焦炉炉顶地面的一体式看火孔盖,还是与焦炉炉顶地面齐平的内嵌式的一体式看火孔盖均能被开启,能够适用于各种焦炉炉型。
39、(4)、本发明中测温时,利用测距仪、测温仪和开启的一体式看火孔盖三者之间的相互位置关系能够精准定位移动中的测温仪位于开启的看火孔中央,进而利用垂直稳定器使测温仪处理垂直状态,从而能够准确的测出当前开启的看火孔底部中央的温度。
40、(5)、本发明无惧焦炉炉顶大型作业设备的干扰,因此测温机器人的总体高度不受限。这是因为当测温机器人前进测温遇到具有作业优先权的大型作业设备无法通过时,可以左右前后移动至高度空间足够的地方躲避大型作业设备,甚至测温机器人可以原地趴下降低总体高度,待焦炉炉顶大型作业设备经过后,再返回或者再站起继续测温。
41、(6)、本发明中不仅能够测量直行温度,还能测量炉头温度和横排温度,尤其是内嵌式的一体式看火孔盖,安装简单,且安装后不影响炉顶工人的日常管理、设备维护维修等各种操作,突破了以往技术的缺陷。
本文地址:https://www.jishuxx.com/zhuanli/20241118/330227.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表