一种水面光伏板清扫装置及清扫方法与流程
- 国知局
- 2024-11-19 09:54:03
本发明涉及一种清扫装置及方法,尤其涉及一种水面光伏板清扫装置及清扫方法。
背景技术:
1、水上光伏电站是指在水塘、中小型天然湖泊、水库、蓄水池,以及采煤塌陷区形成的湖泊等水面上建立的光伏电站。近年来,随着新能源产业的快速发展,“光伏+”综合利用模式正越来越多地走向应用。水上光伏电站建设开始快速落地,渔光互补、盐光互补等模式具有高发电量和高附加值的经济效益,实现多产业的互补发展。
2、光伏组件表面会累积大量灰尘、落叶、鸟粪等污物,这些都会严重影响光伏组件对太阳能的吸收和电能转化,不同的污物累积对光伏组件光电转换效率造成的损失可达5%~24%。对于水上光伏电站光伏组件的清扫的清洗,一般有三种方式:第一种是通过自然降雨的方式来完成光伏组件的清洗,因此清洗时间和效果不可控;第二种是采用人工清洗的方式来完成光伏组件的清洗,但清洗效率较低、人力成本高、清洗操作不方便且存在安全风险;第三种是采用陆地光伏电站常用的光伏清扫机器人,但由于光伏组件安装在水上,相对于陆地光伏电站来说,水上光伏清扫机器人的维护难度大大增加。
3、专利cn108262281a公开了一种全自动太阳能电池板清扫系统,太阳能光伏板上设清扫小车,小车上设毛刷辊,毛刷辊用于清扫光伏板表面灰尘,清扫小车严光伏板移动,从而实现整排光伏板的清扫。但该系统多用于陆地光伏电站光伏板的清扫,在水上光伏大量采用该技术,维护极为不便。
4、专利cn116550711a公开了一种水上光伏清洗船,船体上设一个支架,支架末端设毛刷辊机构,利用毛刷辊机构清扫光伏组件面板,但毛刷辊机构需跟随船体移动,因此清扫作业过程中,船体需沿没一排光伏组件移动,作业效率较低;在对多排光伏板进行清洗作业时,毛刷辊需首先与光伏板进行对接,由于水面漂浮不定,特别是大型水库、大型湖泊、盐田等广阔的水面,存在较大波浪,对接工作有较大困难,根据该技术方案描述,未体现毛刷辊与光伏板对接相关的技术方案,因此,该清洗船仅适用于单排光伏。
技术实现思路
1、发明目的:本发明的目的是提供一种可使用少量清扫机器人清扫大量光伏板并与光伏板精准对接的水面光伏板清扫装置;
2、本发明的第二个目的是提供利用上述的水面光伏板清扫装置清扫水面光伏板的方法。
3、技术方案:本发明所述的水面光伏板清扫装置,包括移动平台和清扫机器人;所述移动平台下方设有用于获得水的浮力并支撑移动平台的浮体、用于驱动移动平台前后左右方向的平移及转向的推进器;所述移动平台设有导航定位模块;所述移动平台上方的一侧架设有第二层平台,所述第二层平台与移动平台的另一侧之间跨设有用于存放清扫机器人的停机位;所述停机位的两端分别与第二层平台、移动平台之间设有第一升降装置、第二升降装置;所述第一升降装置、第二升降装置分别控制停机位的两端升降;所述停机位靠近光伏板的一侧设有导向定位板;所述导向定位板设有开口向下的缺口;还包括设于光伏板的侧边用于使清扫机器人从停机位移动到光伏板上的接驳位,所述接驳位设有向停机位方向伸出的导向杆,所述导向定位板下方的缺口卡接于导向杆上从而使停机位与光伏板固定。
4、其中,所述导向杆的外周套设有用于引导导向定位板与导向杆对接的导向槽。
5、其中,所述导向定位板设弧形缺口。
6、其中,所述推进器为电动式叶片马达。
7、其中,所述浮体为浮筒。
8、其中,所述移动平台设有可人工输入指令分别与推进器、第一升降装置、第二升降装置连接的控制系统,用于控制移动装置的运动以及停机位的升降。
9、其中,所述第一升降装置和第二升降装置为电动式升降装置。
10、其中,所述移动平台和第二层平台的周边分别设有防护栏。
11、利用上述的水面光伏板清扫装置清扫水面光伏板的方法,包括以下步骤:
12、(a)移动平台到达工作待机点,移动到第一个工作位;
13、(b)控制系统控制推进器动作,并控制第一升降装置、第二升降装置的升降,使停机位进行升降,完成停机位与光伏板接驳位的对接;
14、(c)清扫机器人移动至光伏板上,在光伏板上往复清扫一遍,完成光伏板清扫,并回到停机位;
15、(d)控制系统控制第一升降装置、第二升降装置及推进器,使停机位与光伏板接驳位脱离;
16、(e)移动平台移动至下个工作位,并重复第三步至第五步流程;
17、(f)清扫完最后一排光伏板后,移动平台自动移动至待机点。
18、有益效果:本发明与现有技术相比,取得如下显著效果:本发明实现机器人代替人工清扫多排水上光伏板,降低人工成本和劳动强度,同时提高清扫效率;采用自主导航和人工对接的方式,使清扫机器人快速、安全地从一排光伏板到达另一排光伏板;实现了一台清扫机器人完成多排光伏清扫作业的方式,减少大量光伏清扫机器人的投入,降低投入成本。
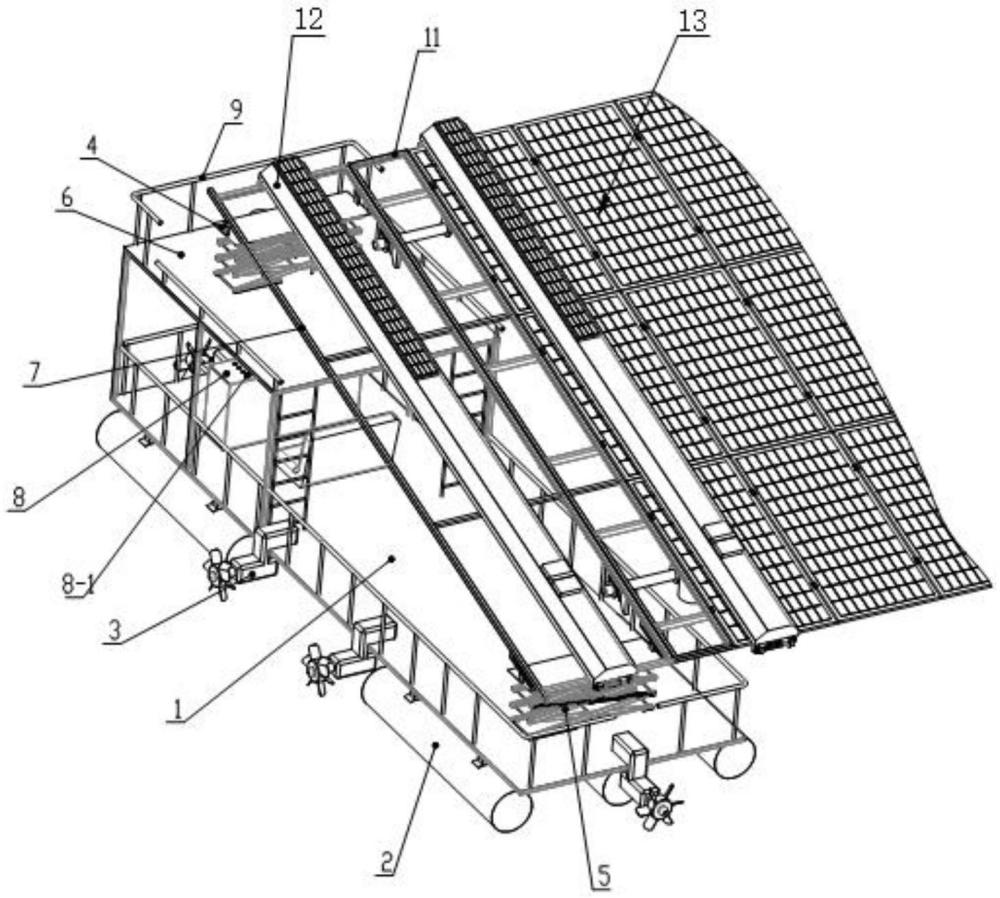
技术特征:1.一种水面光伏板清扫装置,其特征在于,包括移动平台(1)和清扫机器人(12);所述移动平台(1)下方设有用于获得水的浮力并支撑移动平台(1)的浮体(2)、用于驱动移动平台(1)前后左右方向的平移及转向的推进器(3);所述移动平台(1)设有导航定位模块;所述移动平台(1)上方的一侧架设有第二层平台(6),所述第二层平台(6)与移动平台(1)的另一侧之间跨设有用于存放清扫机器人(12)的停机位(7);所述停机位(7)的两端分别与第二层平台(6)、移动平台(1)之间设有第一升降装置(4)、第二升降装置(5);所述第一升降装置(4)、第二升降装置(5)分别控制停机位(7)的两端升降;所述停机位(7)靠近光伏板(13)的一侧设有导向定位板(7-1);所述导向定位板(7-1)设有开口向下的缺口(7-2);还包括设于光伏板(13)的侧边用于使清扫机器人(12)从停机位(7)移动到光伏板(13)上的接驳位(11),所述接驳位(11)设有向停机位(7)方向伸出的导向杆(11-1),所述导向定位板(7-1)下方的缺口卡接于导向杆(11-1)上从而使停机位(7)与光伏板(13)固定。
2.根据权利要求1所述的水面光伏板清扫装置,其特征在于,所述导向杆(11-1)的外周套设有用于引导导向定位板(7-1)与导向杆(11-1)对接的导向槽(11-2)。
3.根据权利要求1所述的水面光伏板清扫装置,其特征在于,所述导向定位板(7-1)下方的缺口(7-2)为与导向杆(11-1)直径相匹配的弧形缺口。
4.根据权利要求1所述的水面光伏板清扫装置,其特征在于,所述移动平台(1)设有可人工输入指令分别与推进器(3)、第一升降装置(4)、第二升降装置(5)连接的控制系统,用于控制移动装置的运动以及停机位(7)的升降。
5.根据权利要求1所述的水面光伏板清扫装置,其特征在于,所述推进器(3)为电动式叶片马达。
6.根据权利要求1所述的水面光伏板清扫装置,其特征在于,所述浮体(2)为浮筒。
7.根据权利要求1所述的水面光伏板清扫装置,其特征在于,所述第一升降装置(4)和第二升降装置(5)为电动式升降装置。
8.根据权利要求1所述的水面光伏板清扫装置,其特征在于,所述移动平台(1)和第二层平台(6)的周边分别设有安全围栏(9)。
9.一种利用权利要求1所述的水面光伏板清扫装置清扫水面光伏板的方法,其特征在于,包括以下步骤:
技术总结本发明公开了一种水面光伏板清扫装置及清扫方法,该装置包括移动平台和清扫机器人;移动平台下方设有浮筒、推进器;移动平台设有导航定位模块;移动平台上方的一侧架设有第二层平台,第二层平台与移动平台的另一侧之间跨设有用于存放清扫机器人的停机位;停机位的两端分别与第二层平台、移动平台之间设有第一升降装置、第二升降装置;第一升降装置、第二升降装置分别控制接驳位的两端升降;停机位靠近光伏板的一侧设有导向定位板;导向定位板设有开口向下的缺口;还包括设于光伏板的侧边的接驳位,接驳位设有导向杆,导向定位板与导向杆对接从而使接驳位与光伏板固定。本发明采用自主导航和人工对接的方式,使清扫机器人快速、安全地从一排光伏板到达另一排光伏板;实现了一台清扫机器人完成多排光伏清扫作业的方式。技术研发人员:张玉涛,郭俊龙,孙霄伟,浑连明,徐善军,姚颖,董杰受保护的技术使用者:北京国电富通科技发展有限责任公司技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/330569.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表