一种应用于河流的智能化水下地形测量方法与流程
- 国知局
- 2024-11-19 09:58:43
本发明涉及应用于内陆水域的水下地形测绘,具体涉及一种应用于河流的智能化水下地形测量方法。
背景技术:
1、传统多波束水下地形测量无法一次测完整条河床的水下地形,一般都需要通过多波束开船来回测量几趟,甚至无论怎么测量都会留下测不到的死角,如图1中的l1和l5位置,还需要采用单波束进行补充测量才能测量出河床完整的水下地形数据,如图1所示。
2、在《广东省河道水域岸线保护与利用规划》的河道地形测量项目的执行过程中,由于涉及东江片区、西江片区、北江片区、韩江片区的四个流域,共有139条河合计3078km的河道水下地形测量工作,整个项目的测量范围广、时间紧、任务重和难度非常大,传统的单波束和多波束测量方式根本就无法按照项目要求完成任务。
技术实现思路
1、有鉴于此,有必要针对上述的问题,提出一种应用于河流的智能化水下地形测量方法,以克服上述背景技术中的若干缺点,从而解决如何提高河流水下地形的测量效率以及精准度的技术问题。
2、为实现上述目的,本发明采取以下的技术方案:
3、本发明提出一种应用于河流的智能化水下地形测量方法,通过一艘有人船和两艘无人船进行测量,所述有人船用于航行在被测量水下地形的水面上;两艘无人船分别位于有人船左右两侧,各艘无人船跟随所述有人船航行;有人船和两艘无人船均配置有多波束测深系统和rtk流动站定位及通信装置;多波束测深系统包括多波束换能器、姿态仪和声速剖面仪;多波束测深系统用于测量水下地形;
4、该智能化水下地形测量方法包括以下步骤:
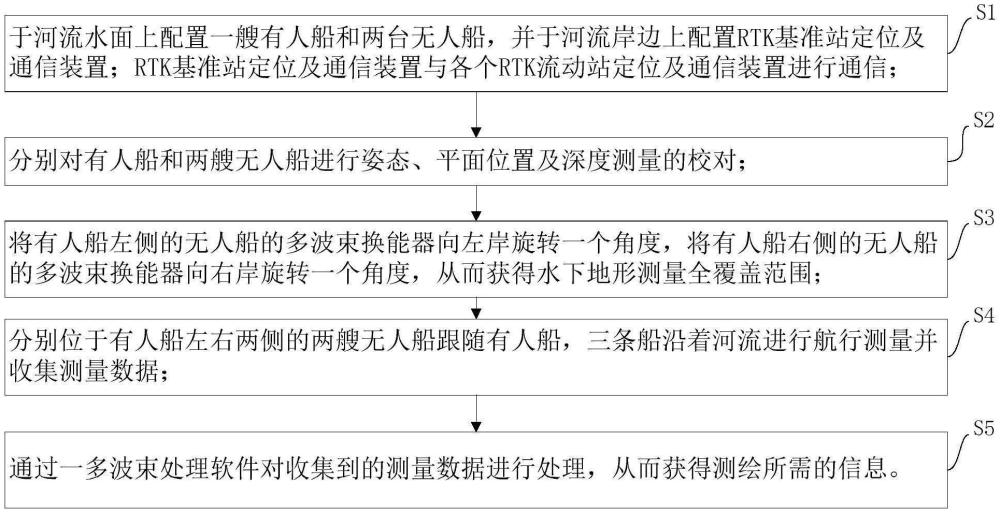
5、步骤s1,于河流水面上配置一艘有人船和两艘无人船,并于河流岸边上配置rtk基准站定位及通信装置;rtk基准站定位及通信装置与各个rtk流动站定位及通信装置进行通信;
6、步骤s2,分别对有人船和两艘无人船进行姿态、平面位置及深度测量的校对;
7、步骤s3,将有人船左侧的无人船的多波束换能器向左岸旋转一个角度,将有人船右侧的无人船的多波束换能器向右岸旋转一个角度,从而获得水下地形测量全覆盖范围;
8、步骤s4,分别位于有人船左右两侧的两艘无人船跟随有人船,三条船沿着河流进行航行测量并收集测量数据;
9、步骤s5,通过一多波束处理软件对收集到的测量数据进行处理,从而获得测绘所需的信息。
10、进一步地,于步骤s2所述的校对过程包括以下步骤:
11、步骤s21,对同一条船的多波束测深系统进行参数设置;
12、步骤s22,对同一条船进行姿态纠正;
13、步骤s23,对同一条船进行平面位置校准;
14、步骤s24,对同一条船进行深度测量校准。
15、进一步地,于步骤s22中,通过跑8字的方式对同一条船进行姿态纠正。
16、进一步地,多波束换能器包括发射换能器和接收换能器。
17、进一步地,rtk流动站定位及通信装置包括gnss接收机。
18、进一步地,水下地形测量全覆盖范围包括左侧无人船测量范围、中间有人船测量范围、右侧无人船测量范围以及中间有人船与左右两侧无人船测量的公共覆盖区域。
19、进一步地,于步骤s2中,先对有人船进行姿态、平面位置及深度测量的校对,再分别对两艘无人船进行姿态、平面位置及深度测量的校对。
20、本发明又提出一种应用于河流的智能化水下地形测量系统,包括:
21、有人船,沿着河流航行于被测量水下地形的水面上;
22、第一无人船,位于有人船左侧方,第一无人船跟随所述有人船航行;
23、第二无人船,位于有人船右侧方,第二无人船跟随所述有人船航行;
24、第一rtk流动站定位及通信装置,设置于有人船上,用于对有人船进行定位及控制;
25、第一多波束测深系统,设置于有人船上,用于将有人船附近的水面下方的水下地形作为第一测绘区域进行测量,从而获得测量数据;
26、第二rtk流动站定位及通信装置,设置于第一无人船上,用于对第一无人船进行定位及控制;
27、第二多波束测深系统,设置于第一无人船上,用于将第一无人船附近的水面下方的水下地形作为第二测绘区域进行测量,从而获得测量数据;第二测绘区域的右侧部与第一测绘区域的左侧部存在重叠区域;
28、第三rtk流动站定位及通信装置,设置于第二无人船上,用于对第二无人船进行定位及控制;
29、第三多波束测深系统,设置于第二无人船上,用于将第二无人船附近的水面下方的水下地形作为第三测绘区域进行测量,从而获得测量数据;第三测绘区域的左侧部与第一测绘区域的右侧部存在重叠区域;
30、多波束处理软件,用于将各个多波束测深系统的测量数据和各个rtk流动站定位及通信装置的定位数据进行处理,从而获得测绘所需的信息;
31、rtk基准站定位及通信装置,rtk基准站定位及通信装置与各个rtk流动站定位及通信装置进行通信。
32、本发明又提出一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上任一项所述的应用于河流的智能化水下地形测量方法的步骤。
33、本发明的有益效果为:
34、本发明提高了河流水下地形的测量效率、精准度以及智能化程度,实现了高分辨率、高质量、实时显示准确的水下地形测量全过程;本发明还具有以下优点:
35、(1)将有人船多波束和两艘无人船多波束进行联合作业,实现了适应河流的“多台多波束水下测量系统”的智能化作业模式;
36、(2)高效地实现了全覆盖、无死角的水下地形测量,无需进行多次重复测量;
37、(4)高效快速完成水下地形测量,大大提高水下地形测量的工作效率,也可大大减少水下地形测量的劳动强度,还可大大提高水下地形测量的安全系数;
38、(5)操作简单、方便实用、效果明显,还可为国土、规划、公路、市政、环保、农业等其他相关行业提供可行性的水下地形测量的技术解决方案;
39、(6)可高效和高质量为水利工程建设提供各种需要的技术成果(如:点云、dem、地形图和水深图等),具有很强的实用价值和现实意义。
技术特征:1.一种应用于河流的智能化水下地形测量方法,其特征在于,通过一艘有人船和两艘无人船进行测量,所述有人船用于航行在被测量水下地形的水面上;两艘无人船分别位于有人船左右两侧,各艘无人船跟随所述有人船航行;有人船和两艘无人船均配置有多波束测深系统和rtk流动站定位及通信装置;多波束测深系统包括多波束换能器、姿态仪和声速剖面仪;多波束测深系统用于测量水下地形;
2.根据权利要求1所述的应用于河流的智能化水下地形测量方法,其特征在于,于步骤s2所述的校对过程包括以下步骤:
3.根据权利要求2所述的应用于河流的智能化水下地形测量方法,其特征在于,于步骤s22中,通过跑8字的方式对同一条船进行姿态纠正。
4.根据权利要求1所述的应用于河流的智能化水下地形测量方法,其特征在于,多波束换能器包括发射换能器和接收换能器。
5.根据权利要求1所述的应用于河流的智能化水下地形测量方法,其特征在于,rtk流动站定位及通信装置包括gnss接收机。
6.根据权利要求1所述的应用于河流的智能化水下地形测量方法,其特征在于,水下地形测量全覆盖范围包括左侧无人船测量范围、中间有人船测量范围、右侧无人船测量范围以及中间有人船与左右两侧无人船测量的公共覆盖区域。
7.根据权利要求1-6任一所述的应用于河流的智能化水下地形测量方法,其特征在于,于步骤s2中,先对有人船进行姿态、平面位置及深度测量的校对,再分别对两艘无人船进行姿态、平面位置及深度测量的校对。
8.一种应用于河流的智能化水下地形测量系统,其特征在于,包括:
9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的应用于河流的智能化水下地形测量方法的步骤。
技术总结本发明提出一种应用于河流的智能化水下地形测量方法,包括:于河流水面上配置一艘有人船和两艘无人船,并于河流岸边上配置一RTK基准站定位及通信装置;分别对有人船和两艘无人船进行姿态、平面位置及深度测量的校对;将有人船左侧的无人船的多波束换能器向左岸旋转一个角度,将有人船右侧的无人船的多波束换能器向右岸旋转一个角度,从而获得水下地形测量全覆盖范围;分别位于有人船左右两侧的两艘无人船跟随有人船,三条船沿着河流进行航行测量并收集测量数据;通过一多波束处理软件对收集到的测量数据进行处理,从而获得测绘所需的信息。本发明又提出一种应用于河流的智能化水下地形测量系统。本发明提高了河流水下地形的测量效率以及精准度。技术研发人员:刘良福,杨波,问娟,李庆松,许叙源受保护的技术使用者:广东省水利电力勘测设计研究院有限公司技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/330941.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表