一种基于激光测距系统的消除TDC行走误差的方法
- 国知局
- 2024-11-21 11:37:57
本发明属于激光测距领域,尤其涉及一种基于激光测距系统的消除tdc行走误差的方法。
背景技术:
1、激光测距仪以其高精度、快速响应和非接触式测量等优点,广泛应用于地形测绘、智能驾驶、工业制造和环境监测等领域。激光测距仪的常用方法包括脉冲法、相位法和三角法等。其中脉冲法以其测距范围大、使用范围广、测距精度高等优势被广泛应用。脉冲法通过对激光发射时刻到激光回波时刻的飞行时间测量与目标的距离,常用的方法分为基于tdc(time to digita lconverter)的时刻鉴别法和基于adc(ana l og to digita lconverter)的全波形采样法。基于tdc的时刻鉴别法使用高精度时间数字转换芯片进行飞行时间测量,该方法在近距离、大信号情况下,具有较高的测量精度,但会存在行走误差的问题,尤其在小信号、远距离的场景下,这种误差带来的影响更加严重,导致测距精度降低;基于adc的全波形采集法依托于高采样率adc芯片获取窄脉冲回波信息,进而测量飞行时间,该方法可以获取多个邻近目标的距离信息,但时间分辨率较低,对硬件、储存和算法的要求更高。
2、经检索,在已有的消除tdc行走误差的算法及系统的研究方案中,都是基于回波的自适应调节,实现了tdc接收信号保持一定范围内的幅值特性和陡峭沿上升特性,因此行走误差仍会存在于在该范围内变化的tdc接收信号中,且自适应调节本身的时间也会一定程度上影响tdc的精度;
3、针对上述的技术缺陷,现提出一种解决方案。
技术实现思路
1、本发明的目的设计一种算法,消除tdc由于不同输入幅值的信号上升沿到达固定阈值的时间不同而造成的行走误差,实现精准测距。
2、本发明的目的可以通过以下技术方案实现:一种基于激光测距系统的消除tdc行走误差的方法,包括;
3、步骤一:基于adc采集激光回波数据;
4、步骤二:对采集的激光回波数据进行拟合和归一化缩放处理;
5、步骤三:计算tdc行走误差的矫正量δt;
6、步骤四:对tdc得到的光飞行时间tof结果进行矫正得到最终的光飞行时间tof。
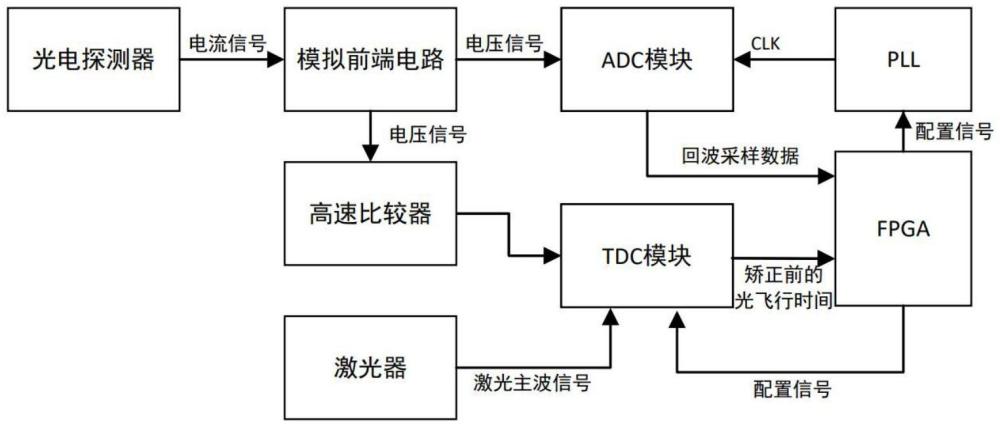
7、优选的,所述基于adc采集激光回波数据的具体过程为;在激光器射出激光的同一时间,激光主波信号给到由可编程门阵列fpga配置好的tdc模块中作为光飞行时间tof的起始时刻,当激光射到待测物表面反射回来,由反偏状态下的光电探测器接收激光回波产生光生电流,并由模拟前端电路进行电流信号到电压信号的预处理,处理结果分别给到adc模块和tdc模块的前置比较器中,当电压信号上升沿达到高速比较器既定阈值电压时输出近似阶跃信号给到tdc模块作为飞行终止时刻,tdc模块输出矫正前的激光飞行时间给到可编程门阵列fpga,同一时间由可编程门阵列fpga配置好的pll输出时钟信号给到adc模块对模拟前端电路的电压信号进行模数转换,将波形对应的数字码值给到可编程门阵列fpga中。
8、优选的,步骤二中所述数据进行拟合和归一化的具体操作过程为:
9、2-1:在可编程门阵列fpga中,对adc输出的激光回波数据采用levenberg-marquardt算法对回波进行高斯模型的拟合得到高斯曲线g1,作为高速比较器输入信号的等效;
10、2-2:将曲线g1在尖峰中心坐标不变的条件下进行归一化整形得到曲线g0。
11、优选的,步骤三中计算tdc行走误差的矫正量δt的具体操作为;
12、分别计算曲线g1和g0与比较器阈值电压的左交点对应时间t1和t0并作差得到矫正量δt=t0-t1;
13、优选的,步骤四:对tdc得到的光飞行时间tof结果进行矫正的具体操作为:
14、4-1:把δt加到tdc输出的矫正前激光飞行时间tc中,得到初步矫正的飞行时间t;
15、4-2:将归一化处理带来的固定误差δt0,加到初步飞行时间中,得出最终的光飞行时间tof:tz=t+δt0。
16、优选的,步骤2-1中对adc采集到的原始回波波形数据进行高斯拟合的表达式g1(x)为:
17、
18、其中,其中a1表示曲线的峰峰值,e是常数,x是表达式的变量,此处变量为时间,b1是曲线的尖锋中心坐标,c1表征高斯曲线的宽度。
19、优选的,步骤2-2中对adc采集到的原始回波波形数据进行高斯拟合后再归一化得到的表达式g0(x)为:
20、
21、其中,a0表示曲线的峰峰值,e是常数,x是表达式的变量,此处变量为时间,b0是曲线的尖锋中心坐标,c0表征高斯曲线的宽度。
22、优选的,步骤2-1中levenberg-marquardt运算流程具体为:
23、2-1.1:获取原始数据;
24、2-1.2:对获取的数据进行离群点剔除处理,根据实际应用场景的不同,对信号中可能存在的干扰因素进行针对性分析,并将环境干扰因素的特征作为剔除行为的主要判定依据,保证后续拟合的准确性和可靠性;
25、2-1.3:对离群点剔除处理后的数据进行变量初始化处理,使用局部极大值检测每帧数据波形的峰值信息,进而获取单帧内所有回波信号的峰值ap、峰值时刻τp和半波峰宽pw。正确设置初始参数向量可以减少迭代次数并保证波形分解的精度;
26、2-1.4:对变量初始化处理后的数据计算jacobi矩阵;
27、2-1.5:残差计算,具体为,其中yi是激光回波在第i个采样时间的振幅;
28、2-1.6:判断精度是否满足要求,若是循环结束输出计算值,若否该数据返回步骤2-1.3循环计算。
29、本发明的有益效果如下:
30、本发明采用adc采集的激光回波数据和lm(levenberg-marquardt)算法进行拟合曲线,并进行归一化缩放,用归一化缩放之后的曲线等效输入高速比较器的模拟信号,用算法前后的信号在比较器阈值处的时间差得到tdc行走误差,对tdc得到的光飞行时间进行补偿矫正,从而提高激光测距的精度。
技术特征:1.一种基于激光测距系统的消除tdc行走误差的方法,其特征在于,包括;
2.根据权利要求1所述的一种基于激光测距系统的消除tdc行走误差的方法,其特征在于,所述基于adc采集激光回波数据包括的具体过程为;
3.根据权利要求2所述的一种基于激光测距系统的消除tdc行走误差的方法,其特征在于,步骤二中所述数据进行拟合和归一化的具体操作过程为:
4.根据权利要求3所述的一种基于激光测距系统的消除tdc行走误差的方法,其特征在于,步骤三中计算tdc行走误差的矫正量δt的具体操作为;
5.根据权利要求4所述的一种基于激光测距系统的消除tdc行走误差的方法,其特征在于,步骤四:对tdc得到的光飞行时间tof结果进行矫正的具体操作为:
6.根据权利要求3所述的一种基于激光测距系统的消除tdc行走误差的方法,其特征在于,步骤2-1中对adc采集到的原始回波波形数据进行高斯拟合的表达式g1(x)为:
7.根据权利要求3所述的一种基于激光测距系统的消除tdc行走误差的方法,其特征在于,步骤2-2中对adc采集到的原始回波波形数据进行高斯拟合后再归一化得到的表达式g0(x)为:
8.根据权利要求3所述的一种基于激光测距系统的消除tdc行走误差的方法,其特征在于,步骤2-1中levenberg-marquardt运算流程具体为:
技术总结本发明涉及计算机网络领域,尤其涉及一种基于激光测距系统的消除TDC行走误差的方法,包括;步骤一:基于ADC采集激光回波数据;步骤二:对采集的激光回波数据进行拟合和归一化缩放处理;步骤三:计算TDC行走误差的矫正量ΔT;步骤四:对TDC得到的光飞行时间TOF结果进行矫正得到最终的光飞行时间TOF,本发明采用ADC采集的激光回波数据和Levenberg‑Marquardt算法进行拟合曲线,并进行归一化缩放,用归一化缩放之后的曲线等效输入高速比较器的模拟信号,用算法前后的信号在比较器阈值处的时间差得到TDC行走误差,对TDC得到的光飞行时间进行补偿矫正,从而提高激光测距的精度。技术研发人员:赵毅强,贾子鋆,李尧,何家骥受保护的技术使用者:天津大学合肥创新发展研究院技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/332111.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表