一种用于多轴十字拉伸疲劳加载装置的原位控制系统的制作方法
- 国知局
- 2024-11-21 11:37:37
本发明涉及控制系统,具体为一种用于多轴十字拉伸疲劳加载装置的原位控制系统。
背景技术:
1、随着现代工业的发展,材料疲劳试验测试在建筑,土木,汽车整车,轴承、航空航天、医疗等多个行业均具有举足轻重的作用,试验测试的复杂性也越来越大,以往的材料疲劳试验仅仅是进行单向往复拉压,测量疲劳试验次数即可,后来的十字拉伸,需要单方向驱动,但保持中心位置不变,再到近些年,出现双通道甚至四通道的十字拉伸,并且要求的试验频率越来越高,这就对试验设备提出了更高的要求,很多试验均采用多个轴同时或者分别加载方式完成试验测试,虽然能够完成试验测试,但无法保证控制精度。
2、如公开号为:cn207731097u,公开了一种多通道电动伺服疲劳试验加载控制系统,公开号为:cn217689849u,公开了一种多轴试验机的伺服控制系统,公开号为:cn104533852a,公开了一种汽车零部件疲劳试验多通道电液伺服控制系统,而上述三个方案均是多通道控制系统,应用于多通道试验测试中,所有方案均只使用了液压缸主位移传感器,精度较差,无法实现高精度相位控制,并且方案1(一种多通道电动伺服疲劳试验加载控制系统)和方案2(一种多轴试验机的伺服控制系统)中只体现出常规多通道pid算法,更加无法满足多通道疲劳十字拉伸试验的需求。
技术实现思路
1、针对现有技术的不足,本发明提供了一种用于多轴十字拉伸疲劳加载装置的原位控制系统,解决了现有技术中采用多个轴同时或者分别加载方式完成试验测试,但无法保证控制精度的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种用于多轴十字拉伸疲劳加载装置的原位控制系统,包括传感器,所述传感器包括有小量程位移传感器、加速度传感器、常规位移传感器,所述传感器上连接有信号调理器,所述信号调理器将传感器信号、加速度信号和常规位移传感器信号进行放大、滤波等处理,所述信号调理器上连接有多路adc,所述多路adc将经信号调理器处理后的模拟信号转换为数字信号,所述多路adc上连接有数字控制单元,所述数字控制单元包括有fpga、dsp、dac。
3、优选的,所述小量程位移传感器测量微小位移,提高测量精度。
4、优选的,所述加速度传感器测量加速度信号,对速度整定控制。
5、优选的,所述常规位移传感器测量常规位移。
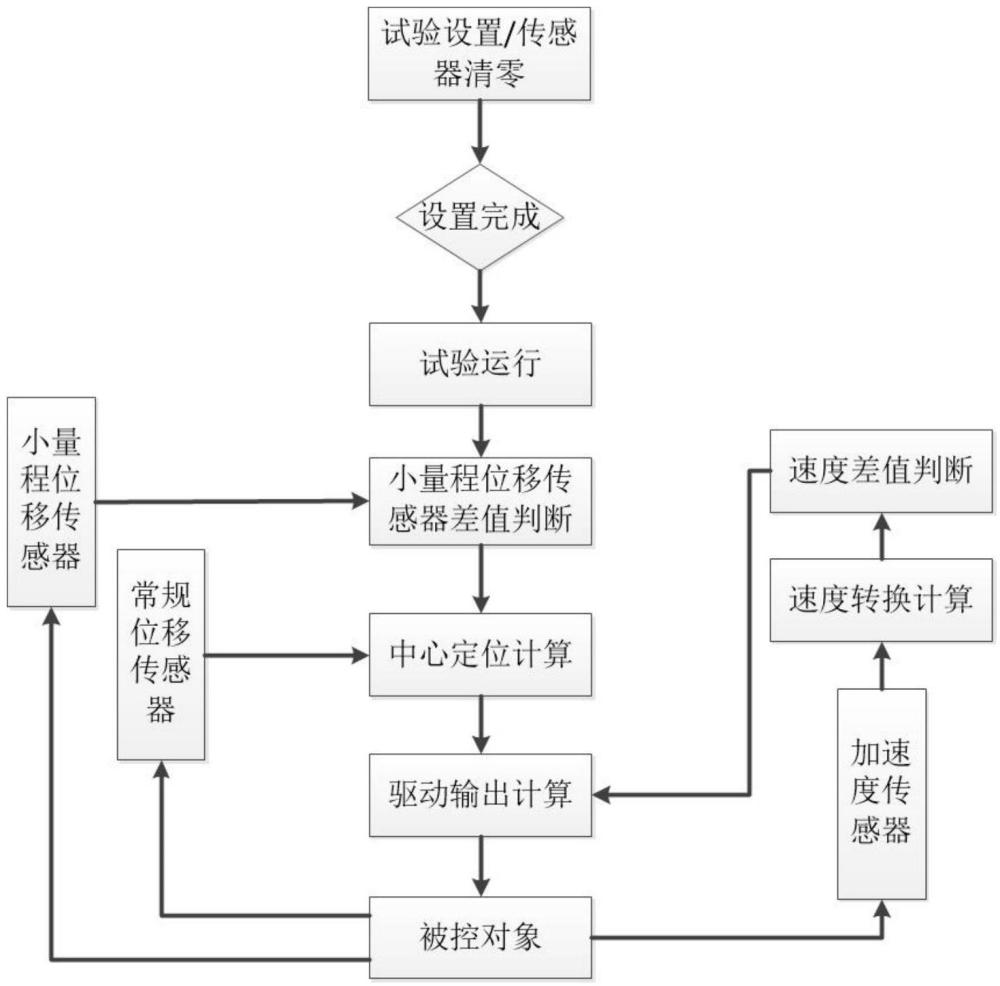
6、优选的,所述数字控制单元是原位控制系统的核心,采用fpga作为信号接口,多路adc将传感器模拟信号转换为数字信号,然后送到fpga,fpga对传感器的数字信号进行预处理后,再送到dsp,这些信号在dsp内执行pid闭环控制、中心定位和速度整定等算法处理。
7、优选的,所述传感器的信号具体为:小量程位移传感器信号、加速度信号和常规位移传感器信号。
8、优选的,所述多路adc将经信号调理器处理后的模拟信号转换为数字信号。
9、优选的,所述fpga作为主要的硬件接口,在fpga内部执行所有信号的处理工作,并通过emi总线将处理后的信号传送给dsp。
10、优选的,所述dsp作为系统的核心算法单元,接收fpga传送的信号,并执行p id闭环控制算法、中心定位算法及速度整定算法,输出驱动信号。
11、优选的,所述dac将dsp输出的数字驱动信号转换为模拟驱动信号,以驱动执行单元。
12、本发明提供了一种用于多轴十字拉伸疲劳加载装置的原位控制系统。具备以下有益效果:
13、1、本发明将小量程位移传感器应用在系统中,并在dsp中实现新的闭环控制算法。充分利用小量程,高精度位移传感器的特点,使多轴十字拉伸疲劳试验设备在疲劳试验过程中提高了中心定位控制精度,能够有效的提高了控制精度。
14、2、本发明增加了加速度传感器在系统中的应用,通过加入加速度传感器,不仅可以消除了多余的惯性力,确保了试验数据的准确性,还可以通过速度整定算法,解决每个通道具有速度差的问题,从而进一步提高系统控制精度。
技术特征:1.一种用于多轴十字拉伸疲劳加载装置的原位控制系统,包括系统所使用的传感器,其特征在于,所述传感器包括有小量程位移传感器、加速度传感器、常规位移传感器,所述传感器上连接有信号调理器,所述信号调理器将传感器信号、加速度信号和常规位移传感器信号进行放大、滤波等处理,所述信号调理器上连接有多路adc,所述多路adc将经信号调理器处理后的模拟信号转换为数字信号,所述多路adc上连接有数字控制单元,所述数字控制单元包括有fpga、dsp、dac。
2.根据权利要求1所述的一种用于多轴十字拉伸疲劳加载装置的原位控制系统,其特征在于,所述小量程位移传感器测量微小位移,提高测量精度。
3.根据权利要求1所述的一种用于多轴十字拉伸疲劳加载装置的原位控制系统,其特征在于,所述加速度传感器测量加速度信号,对速度整定控制。
4.根据权利要求1所述的一种用于多轴十字拉伸疲劳加载装置的原位控制系统,其特征在于,所述常规位移传感器测量常规位移。
5.根据权利要求1所述的一种用于多轴十字拉伸疲劳加载装置的原位控制系统,其特征在于,所述数字控制单元是原位控制系统的核心,采用fpga作为信号接口,多路adc将传感器的模拟信号转换为数字信号,然后发送到fpga,由fpga对传感器的信号进行预处理后,再送到dsp,这些信号在dsp内执行pid闭环控制、中心定位和速度整定等算法处理。
6.根据权利要求1所述的一种用于多轴十字拉伸疲劳加载装置的原位控制系统,其特征在于,所述传感器的信号具体为:小量程位移传感器信号、加速度信号和常规位移传感器信号。
7.根据权利要求1所述的一种用于多轴十字拉伸疲劳加载装置的原位控制系统,其特征在于,所述多路adc将经信号调理器处理后的模拟信号转换为数字信号。
8.根据权利要求1所述的一种用于多轴十字拉伸疲劳加载装置的原位控制系统,其特征在于,所述fpga作为主要的硬件接口,在fpga内部执行所有信号的处理工作,并通过emi总线将处理后的信号传送给dsp。
9.根据权利要求1所述的一种用于多轴十字拉伸疲劳加载装置的原位控制系统,其特征在于,所述dsp作为系统的核心算法单元,接收fpga传送的信号,并执行pid闭环控制算法、中心定位算法及速度整定算法,输出驱动信号。
10.根据权利要求1所述的一种用于多轴十字拉伸疲劳加载装置的原位控制系统,其特征在于,所述dac将dsp输出的数字驱动信号转换为模拟驱动信号,以驱动执行单元。
技术总结本申请涉及多轴疲劳控制系统领域,公开了一种用于多轴十字拉伸疲劳加载装置的原位控制系统,包括系统所使用的传感器,所述传感器包括有小量程位移传感器、加速度传感器、常规位移传感器,所述传感器上连接有信号调理器,所述信号调理器将传感器信号、加速度信号和常规位移传感器信号进行放大、滤波等处理,所述信号调理器上连接有多路ADC,所述多路ADC将经信号调理器处理后的模拟信号转换为数字信号,所述多路ADC上连接有数字控制单元。本发明将小量程位移传感器应用在系统中,并在DSP中实现新的闭环控制算法。充分利用小量程,高精度位移传感器的特点,使多轴十字拉伸疲劳试验设备在疲劳试验过程中提高了中心定位控制精度,能够有效的提高了控制精度。技术研发人员:孙健,白爽,杨秀光,范晓望,马伟,姚丙南,孙鹏,苗天琪,杨添博受保护的技术使用者:中机试验装备股份有限公司技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/332087.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。