一种可倾转旋翼轴的四轴八旋翼无人机
- 国知局
- 2024-11-21 11:49:23
本发明属于飞行器设计,具体涉及一种可倾转旋翼轴的四轴八旋翼无人机。
背景技术:
1、近年来,随着机器视觉、控制算法等技术与多旋翼无人机的应用结合,无人机的性能得到了显著提升。除了最基本的遥控飞行,现代的无人机具有了智能避障,轨迹规划跟踪等高级功能。多旋翼无人机具有易操控、结构简单等优势,并有着广泛的应用场景。
2、传统四轴无人机有四个控制输入,而有六个输出,因此是一个欠驱动、强耦合系统,机动性受到限制,无法独立控制位置与姿态。在使用中,限制了其在复杂环境中完成任务的能力。现有的倾转机构研究中,虽能通过机械结构使旋翼倾转,但是大多只能绕其所在机臂进行转动,而不能使旋翼轴在空间中进行全向自由转动,因此在改变螺旋桨拉力方向的方面具有局限性,机动性不能有效保证。
技术实现思路
1、鉴于以上问题,本发明的目的在于提出一种可倾转旋翼轴的四轴八旋翼无人机,通过增加控制输入的个数,将无人机从欠驱动系统转化为过驱动系统,使之能够独立控制其位置与姿态。
2、为实现上述目的,本发明的技术方案为:改变传统四旋翼无人机的固定机架式结构,通过倾转旋翼轴的结构设计,实现机臂可动,从而带动旋翼轴在空间中进行全向倾转。使螺旋桨能够产生方向可变的升力,通过改变旋翼轴倾斜方向调整无人机姿态。
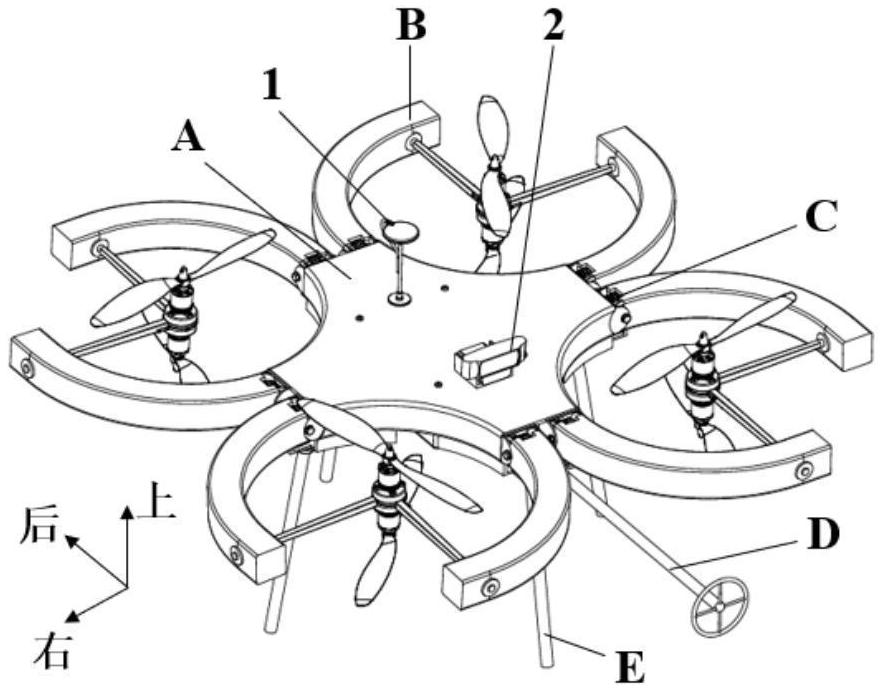
3、本发明的一种可倾转旋翼轴的四轴八旋翼无人机,由机身组件a、连接组件组b、倾转驱动组件组c、探测组件d、起落架组e、gps模块1和摄像头2组成,其中:连接组件组b中连接组件ⅰb1、连接组件ⅱb2、连接组件ⅲb3和连接组件ⅳb4与机身组件a连接方式均相同,以连接组件ⅰb1为例:连接组件ⅰb1位于机身组件a中连接板组ⅰa2和连接板组ⅱa3之间,且连接组件ⅰb1的弧形机臂ⅰb5内端的吊耳对ⅲ19a与机身组件a中连接板组ⅳa3的吊耳对ⅱ16同轴心配置;连接组件ⅰb1的弧形机臂ⅱb7内端的吊耳对ⅳ19b与机身组件a中连接板组ⅰa2的吊耳对ⅰ12同轴心配置;倾转驱动组件组c中倾转驱动组件ⅰc1和倾转驱动组件ⅱc2位于机身组件a中变相十字形机架外壳8的前部;倾转驱动组件ⅲc3和倾转驱动组件ⅳc4机身组件a中变相十字形机架外壳8的右部;倾转驱动组件ⅴc5和倾转驱动组件ⅵc6位于机身组件a中变相十字形机架外壳8的后部;倾转驱动组件ⅶc7和倾转驱动组件ⅷc8位于机身组件a中变相十字形机架外壳8的左部;且倾转驱动组件ⅰc1、倾转驱动组件ⅱc2、倾转驱动组件ⅲc3、倾转驱动组件ⅳc4、倾转驱动组件ⅴc5、倾转驱动组件ⅵc6、倾转驱动组件ⅶc7和倾转驱动组件ⅷc8与机身组件a中变相十字形机架外壳8的连接方式均相同,其中:以倾转驱动组件ⅰc1为例:倾转驱动组件ⅰc1中的底座40固接于机身组件a的机架外壳8近前端的上面,倾转驱动组件ⅰc1中蜗杆39的短轴39a与机身组件a上连接板组ⅰa2的带孔立板ⅰ13的孔活动连接;蜗轮37位于连接板组ⅰa2的吊耳对ⅰ12之间,且二者同轴心配置;倾转驱动组件ⅰc1的蜗轮37位于连接组件ⅰb1的弧形机臂ⅱb7内端的吊耳对ⅲ19a之间,且二者同轴心配置,法兰ⅰ36和法兰ⅱ38与吊耳对ⅲ19a固接;机身组件a中连接板组ⅰa2的吊耳对ⅰ12、连接组件ⅰb1的弧形机臂ⅱb7内端的吊耳对ⅲ19a及倾转驱动组件ⅰc1的蜗轮37的中心孔三者均同轴心,倾转驱动组件ⅰc1的销轴35两端与吊耳对ⅰ12和吊耳对ⅲ19a的两对孔活动连接;gps模块1胶接于机身组件a中顶板3的后部上面,摄像头2固接于顶板3的前部上面;探测组件d的横板41固接于机身组件a中连接板组ⅰa2的立板14前面;起落架组e由四个结构相同的起落架组成,每个起落架均由连接件44和起落架杆45组成,且起落架杆45固接于连接件44下端;起落架组e的四个连接件44通过螺钉将其上端的螺孔分别固接于机身组件a中机架外壳8下端面的四个螺孔组上。
4、所述的机身组件a由减振器a1、顶板3、螺栓组4、支撑板5、飞控6、电池仓7和机架外壳8组成,其中,减振器a1由上板9、下板10和减振球组11组成,上板9和下板10经减振球组11的四个减振球固接;顶板3经螺栓组4的四个螺栓与支撑板5固接,减振器a1的下板10固接于支撑板5上面,飞控6固接于减振器a1的上板9上面,电池仓7通过螺钉固接于机架外壳8下部;机架外壳8为变相的十字形,十字形的端部设有连接板组ⅰa2、连接板组ⅱa3、连接板组ⅲa4和连接板组ⅳa5;连接板组ⅰa2、连接板组ⅱa3、连接板组ⅲa4和连接板组ⅳa5结构相同,均设有吊耳对ⅰ12、带孔立板ⅰ13、带孔立板ⅱ15和吊耳对ⅱ16;连接板组ⅰa2中还设有立板14。
5、所述的连接组件组b由连接组件ⅰb1、连接组件ⅱb2、连接组件ⅲb3和连接组件ⅳb4组成,连接组件ⅰb1、连接组件ⅱb2、连接组件ⅲb3和连接组件ⅳb4结构相同,均由弧形机臂ⅰb5、旋翼组件b6、弧形机臂ⅱb7、连杆ⅰ17和连杆ⅱ18组成,弧形机臂ⅰb5和弧形机臂ⅱb7结构相同、方向相反;以弧形机臂ⅰb5为例,弧形机臂ⅰb5的横截面为正方形,弧形机臂ⅰb5内端设有吊耳对ⅲ19a,弧形机臂ⅰb5近外端设有孔对20的两个孔,孔对20的两个孔上过盈连接有轴承对21的两个轴承,轴承对21两侧设有挡圈对22的两个挡圈;弧形机臂ⅱb7内端设有吊耳对ⅳ19b;旋翼组件b6由桨叶ⅰ25、电机ⅰ26、旋盖ⅰ27、轴承ⅰ28、短轴29、轴承ⅱ30、旋盖ⅱ31、电机ⅱ32和桨叶ⅱ33组成,桨叶ⅰ25、电机ⅰ26、旋盖ⅰ27、轴承ⅰ28、短轴29、轴承ⅱ30、旋盖ⅱ31、电机ⅱ32和桨叶ⅱ33自上而下顺序排列,其中:轴承ⅰ28内圈与短轴29上部过盈连接,轴承ⅰ28外圈与旋盖ⅰ27下部内圈过盈连接;轴承ⅱ30内圈与短轴29下部过盈连接,轴承ⅱ30外圈与旋盖ⅱ31上部内圈过盈连接;电机ⅰ26下端与旋盖ⅰ27上面固接,桨叶ⅰ25与电机ⅰ26上端的输出轴固接;电机ⅱ32上端与旋盖ⅱ31下面固接,桨叶ⅱ33与电机ⅱ32下端的输出轴固接;旋盖ⅰ27上设有环槽ⅰ27a,旋盖ⅱ31上设有环槽ⅱ31a;连杆ⅰ17外端轴颈与弧形机臂ⅰb5中孔对20同轴心连接,连杆ⅰ17外端轴颈与挡圈对22上分别设有相对的孔,通过定位销对23使连杆ⅰ17与挡圈对22固接,并实现连杆ⅰ17的轴向定位;连杆ⅱ18外端轴颈与弧形机臂ⅱb7中孔对同轴心连接,连杆ⅰ18外端轴颈与挡圈对上分别设有相对的孔,通过定位销对使连杆ⅱ18与挡圈对固接,并实现连杆ⅱ18的轴向定位;连杆ⅰ17内端与环24a固接,环24a与旋翼组件b6中旋盖ⅰ27的环槽ⅰ27a固接;连杆ⅱ18内端与环24b固接,环24b与旋翼组件b6中旋盖ⅱ31的环槽ⅱ31a固接;所述的倾转驱动组件组c由倾转驱动组件ⅰc1、倾转驱动组件ⅱc2、倾转驱动组件ⅲc3、倾转驱动组件ⅳc4、倾转驱动组件ⅴc5、倾转驱动组件ⅵc6、倾转驱动组件ⅶc7和倾转驱动组件ⅷc8组成,倾转驱动组件ⅰc1、倾转驱动组件ⅱc2、倾转驱动组件ⅲc3、倾转驱动组件ⅳc4、倾转驱动组件ⅴc5、倾转驱动组件ⅵc6、倾转驱动组件ⅶc7和倾转驱动组件ⅷc8结构相同,均由电机ⅲ34、销轴35、法兰ⅰ36、蜗轮37、法兰ⅱ38、蜗杆39和底座40组成,电机ⅲ34、底座40和蜗杆39自内而外顺序排列,电机ⅲ34外平面固接于底座40的立板内面,蜗杆39后部固接于电机ⅲ34的输出端;蜗轮37与蜗杆39齿间啮合,法兰ⅰ36、蜗轮37和法兰ⅱ38自左至右顺序排列并固接,销轴35贯穿三者的中心孔,并活动连接。
6、所述的探测组件d由横板41、杆42和探头43组成,横板41、杆42和探头43自后至前顺序排列并固接。
7、本发明的工作过程如下:
8、假设无人机向后方飞行时,倾转驱动组件ⅰc1与倾转驱动组件ⅱc2中的电机ⅲ34驱动蜗杆39,根据齿间啮合使蜗轮37转动,蜗轮37带动与其固接的连接组件ⅰb1中的弧形机臂ⅱb7和连接组件ⅱb2中的弧形机臂ⅱb7向上倾转;同时倾转驱动组件ⅴc5与倾转驱动组件ⅵc6中的电机ⅲ34以相同方式驱动连接组件ⅲb3中的弧形机臂ⅱb7和连接组件ⅳb4中的弧形机臂ⅱb7向下倾转,通过连杆ⅰ17和连杆ⅱ18带动旋翼组件b6向后倾转一定角度,改变桨叶ⅰ25及桨叶ⅱ33的升力方向,产生偏向后方的分力,实现无人机的向后运动,无人机向前、左、右的工作原理与之相同;采用的蜗轮37及蜗杆39传动具有自锁性,防止了桨叶升力对倾转角度的影响;无人机在前后左右的运动过程中,机身组件a始终保持水平,提高了机体稳定性与机动性。
9、假设无人机的探测组件d接触被测物时,倾转驱动组件ⅰc1与倾转驱动组件ⅱc2中的电机ⅲ34驱动蜗杆39,根据齿间啮合使蜗轮37转动,蜗轮37带动与其固接的连接组件ⅰb1中的弧形机臂ⅱb7和连接组件ⅱb2中的弧形机臂ⅱb7向下倾转;同时倾转驱动组件ⅴc5与倾转驱动组件ⅵc6中的电机ⅲ34以相同方式驱动连接组件ⅲb3中的弧形机臂ⅱb7和连接组件ⅳb4中的弧形机臂ⅱb7向上倾转,通过连杆ⅰ17和连杆ⅱ18带动旋翼组件b6向前倾转一定角度,使桨叶ⅰ25及桨叶ⅱ33产生方向偏向前方的推力,从而使探测组件d的探头43紧贴被测物体,确保了检测的精确性,拓展了该无人机在高空探伤检测中的应用场景。
10、假设无人机受空气中气流干扰时,通过倾转驱动组件组c驱动连接组件组b进行倾转,使旋翼组件b6中桨叶ⅰ25及桨叶ⅱ33在空间中产生可全向改变的升力方向,提供与来流方向相反的分力,抵消气流对无人机的干扰,大大提升了无人机运行的稳定性。
11、本发明的有益效果在于:
12、1.本发明提出的可倾转旋翼轴结构,增加了控制输入个数,使无人机成为过驱动系统,可以独立控制其位置与姿态。保留传统无人机的易操作性、高可靠性等优点的同时提高了无人机的机动性与灵活性。
13、2.本发明中采用的倾转旋翼轴机构可使螺旋桨围绕电机轴在空间中实现全向倾转,产生的升力方向可灵活改变。无人机在实现前后、左右等位置运动时,只需控制可动机臂的摆动幅度实现位置改变,机身的姿态不受影响,同时提高了抗风扰能力。
本文地址:https://www.jishuxx.com/zhuanli/20241120/332865.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表