用于执行对象尺寸标注的方法和系统与流程
- 国知局
- 2024-11-21 11:53:40
背景技术:
1、在运输、存储或移动行业,公司通常根据要运输、存储和移动的一个或多个物品的尺寸提供定价。手动测量多个项目中的每个项目的尺寸,例如使用卷尺或其他测量机构,可能会很耗时和/或不准确。此外,有些项目可能不是箱形或对称的,这可能会增加测量这些项目的复杂性。
技术实现思路
1、以下呈现了一个或多个方面的简化概述,以便提供对这些方面的基本理解。本概述不是对所有预期方面的广泛概述,既不旨在识别所有方面的关键或重要元素,也不旨在描述任何或所有方面的范围。其唯一目的是以简化形式呈现一个或多个方面的一些概念,作为稍后呈现的更详细描述的前奏。
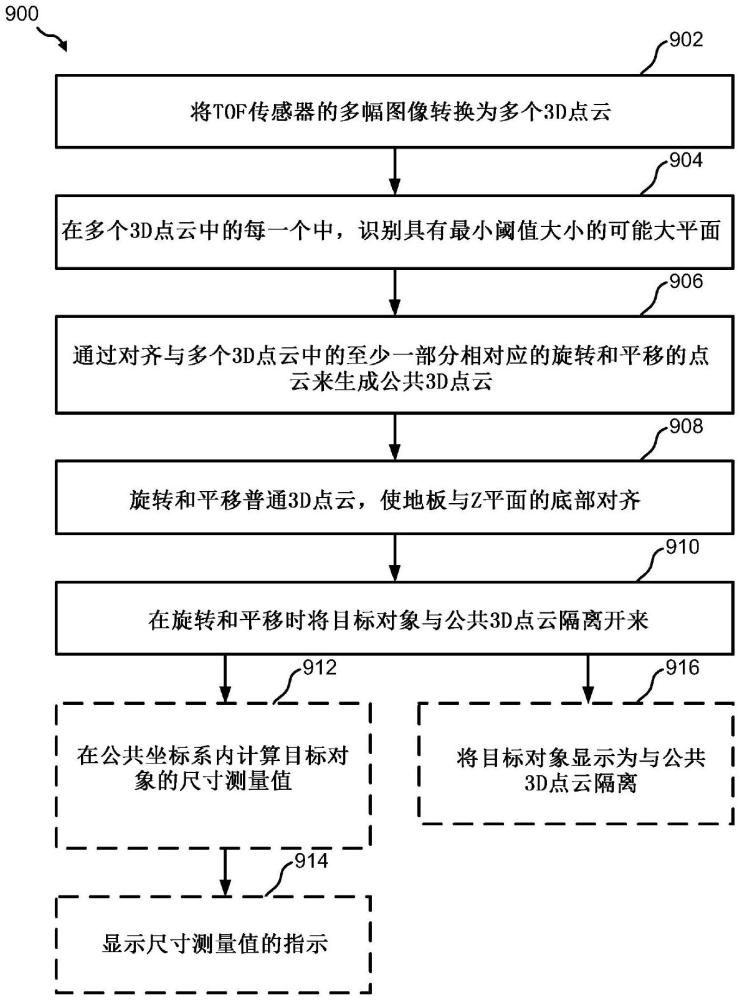
2、本公开的方面包括一种用于从飞行时间(tof)传感器的多个图像中分离目标场景对象的方法。该方法包括:将来自tof传感器的多个图像转换为多个三维(3d)点云,在所述多个3d点云中的每一个中识别具有最小阈值大小的一个或多个大平面,通过对齐与所述多个3d点云的至少一部分相对应的旋转和平移的点云来生成公共3d点云,旋转和平移所述公共3d点云,以使一个或多个大平面中的一个被识别为所述公共3d点云的公共坐标系内的地平面,和在旋转和平移时将目标对象与所述公共3d点云分离。
3、在另一方面,提供了一种系统,包括存储器和耦合到存储器的处理器。处理器被配置为将来自tof传感器的多个图像转换为多个3d点云,在所述多个3d点云中的每一个中识别具有最小阈值大小的一个或多个大平面,通过对齐与多个3d点云中的至少一部分相对应的旋转和平移的点云来生成公共3d点云,旋转和平移公共3d点云,以使一个或多个大平面中的一个被识别为公共3d点云中的公共坐标系内的地平面,和在旋转和平移时将目标对象与所述公共3d点云分离。
4、在另一方面,提供了一种计算机可读介质,包括可由一个或多个处理器执行的代码,用于将目标场景对象与tof传感器的多个图像分离。该代码包括用于将来自tof传感器的多个图像转换为多个3d点云的代码,在所述多个3d点云中的每一个中识别具有最小阈值大小的一个或多个大平面,通过对齐与所述多个3d点云的至少一部分相对应的旋转和平移的点云来生成公共3d点云,旋转和平移所述公共3d点云,以使一个或多个大平面中的一个被识别为所述公共3d点云的公共坐标系内的地平面,和在旋转和平移时将目标对象与所述公共3d点云分离。
5、为了实现上述和相关目的,一个或多个方面包括以下在权利要求中充分描述和特别指出的特征。以下描述和附图详细阐述了一个或多个方面的某些说明性特征。然而,这些特征仅指示了可以采用各个方面的原理的各种方式中的少数几种,并且本描述旨在包括所有这些方面及其等效物。
技术特征:1.一种用于从飞行时间(tof)传感器的多个图像中分离目标场景对象的方法,包括:
2.根据权利要求1所述的方法,其中分离目标对象包括:
3.根据权利要求2所述的方法,其中分离目标对象包括选择具有位置最接近由所述原点指向方向定义的优选轴的点的子云。
4.根据权利要求1所述的方法,其中分离目标对象包括进一步从所述公共3d点云中删除与表示地板或潜在墙壁的一个或多个大平面相关联的点。
5.根据权利要求1所述的方法,其中分离目标对象包括:
6.根据权利要求1所述的方法,还包括在屏幕界面上显示与所述公共3d点云分离的所述目标对象。
7.根据权利要求1所述的方法,还包括测量与所述公共3d点云分离的所述目标对象的宽度、长度和高度尺寸。
8.根据权利要求7所述的方法,还包括在七维参数空间中搜索围绕所述目标对象的边界框,其中测量所述目标对象的宽度、长度和高度是基于所述边界框的宽度、高度和长度。
9.根据权利要求8所述的方法,还包括在屏幕界面上显示所述公共3d点云和围绕所述目标对象的边界框。
10.根据权利要求9所述的方法,其中显示所述目标对象包括在三个正交投影内联合显示所述公共3d点云和围绕所述目标对象的边界框。
11.一种系统,包括:
12.根据权利要求11所述的系统,其中所述处理器被配置为至少部分地通过以下方式分离所述目标对象:
13.根据权利要求12所述的系统,其中所述处理器被配置为至少部分地通过以下方式分离所述目标对象选择具有位置最接近由所述原点指向方向定义的优选轴的点的子云。
14.根据权利要求11所述的系统,其中所述处理器被配置为至少部分地通过以下方式分离所述目标对象进一步从所述公共3d点云中删除与表示地板或潜在墙壁的一个或多个大平面相关联的点。
15.根据权利要求11所述的系统,其中所述处理器被配置为至少部分地通过以下方式分离所述目标对象:
16.根据权利要求11所述的系统,其中所述处理器还被配置为在屏幕界面上显示与所述公共3d点云分离的所述目标对象。
17.根据权利要求11所述的系统,其中所述处理器还被配置为测量与所述公共3d点云分离的所述目标对象的宽度、长度和高度尺寸。
18.根据权利要求17所述的系统,其中所述处理器还被配置为在七维参数空间中搜索围绕所述目标对象的边界框,其中测量所述目标对象的宽度、长度和高度是基于所述边界框的宽度、高度和长度。
19.一种计算机可读介质,包括可由一个或多个处理器执行的代码,用于将目标场景对象与飞行时间(tof)传感器的多个图像分离,所述代码包括用于以下操作的代码:
20.根据权利要求19所述的计算机可读介质,其中用于分离目标对象的代码包括用于以下的代码:
技术总结本公开的方面包括从飞行时间(TOF)传感器的多个图像中分离目标场景对象。TOF传感器的多个图像可以转换为多个三维(3D)点云。在多个3D点云中的每一个中,可以识别出具有最小阈值大小的一个或多个大平面。通过对齐与多个3D点云的至少一部分相对应的旋转和平移的点云,可以生成公共3D点云。公共3D点云可以被旋转和平移,以使一个或多个大平面中的一个被识别为公共3D点云中的公共坐标系内的地平面,并且可以分离目标对象。技术研发人员:P·L·周,A·S·H·艾尔杜杰理受保护的技术使用者:美国亚德诺半导体公司技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/333246.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。