一种自铺轨式偏心轮运载装备及运行方法与流程
- 国知局
- 2024-11-21 12:08:56
本发明属于运载装备,具体涉及一种自铺轨式偏心轮运载装备及运行方法。
背景技术:
1、传统式汽车以发动机、旋转电机作为动力系统,动力的传动则需要通过各类传动机构才能传递至驱动轮,驱动轮通过直接与地面接触而产生的摩擦力,实现车辆的行驶。该过程中的动力传递损失较大,且行驶速度也受到限制。同时,汽车驱动轮与底盘直接接触以及传动机构进行动力传递时各部件之间存在的接触,大大增加了传统式汽车的摩擦损耗。同时,近些年随着能源需求与环境资源之间的矛盾愈发突出,电驱车辆由于其自身环保、节能等优势逐渐成为公路运载领域研究的热点,但电驱动车辆运行中,驱动轮将直接承载包括各驱动轮本身、底盘、运载体及乘客等所有重量进行驱动,对整车的能量产生极大消耗,节能效果相对较低。
2、在此背景下,众多学者提出了多种悬浮式电驱车辆方案,如专利号为cn109204008b的发明专利公开了一种半悬浮的电动磁悬浮汽车。但该方案的悬浮力由磁轮和安装有导体板的磁浮车道提供,若车辆行驶距离较长,则需要大量的悬浮车道和导体板,导致整车成本增加且可行性较差。
技术实现思路
1、针对现有技术中电动磁悬浮汽车行驶距离较长时,则需要大量的悬浮车道和导体板,导致整车成本增加且可行性较差的问题,本发明提供了一种自铺轨式偏心轮运载装备及运行方法。
2、本发明采用的技术方案如下:
3、一种自铺轨式偏心轮运载装备的运行方法,包括以下步骤:
4、步骤1:当至少一个运载单元的偏心轮长轴转动至与地面接触时,该运载单元承载;另外至少一个运载单元的偏心轮短轴转动至朝向地面时,该运载单元沿运动方向铺轨;
5、步骤2:当步骤1中的运载单元和偏心轮沿运动方向进一步运动时,承载的运载单元将转变为铺轨,铺轨的运载单元将转变为承载;
6、步骤1和步骤2循环进行,实现运载装备自铺轨运行。
7、作为优选,步骤1中承载的运载单元的偏心轮从长轴向短轴方向的转动过程中完成从承载单元到铺轨单元的交替;铺轨的运载单元的偏心轮从短轴向长轴方向转动的过程中完成从铺轨单元到承载单元的交替。
8、作为优选,通过铺轨的运载单元的偏心轮驱动装置和/或运载底座驱动装置驱动运载底座运动实现铺轨。
9、作为优选,通过运载体驱动装置和/或承载单元的运载底座驱动装置驱动运载体运动。
10、作为优选,所述偏心轮的长轴与地面接触时,运载单元承载;承载的运载单元的偏心轮的长轴向短轴方向的转动过程中,运载单元对运载体的支撑力减弱或消失;铺轨的运载单元的偏心轮的短轴向长轴方向的转动过程中,运载单元对运载体提供支撑力。
11、作为优选,所述运载体与运载底座之间通过设置支撑组件来减小铺轨的运载单元与运载体之间的运动阻力。
12、采用该技术方案后,在运载体与运载底座之间设置有支撑组件,使运载底座通过支撑组件为运载体提供支撑力,可减小运行时运载底座与运载体之间的运行阻力,以减小运载体和运载底座的磨损及驱动所需的能耗。
13、作为优选,偏心轮组件的长轴处的轮面长度小于短轴处轮面长度,使偏心轮组件在运行时铺轨时长大于承载时长。
14、采用该技术方案后,偏心轮组件的长轴处的轮面长度小于短轴处轮面长度,大部分轮面用于铺轨,使偏心轮组件在运行时铺轨时长大于承载的时长,从而提高运载体的运行速度。
15、本发明中运行方法的原理如下:
16、偏心轮长轴和短轴的定义分别为:偏心轮轮面分为两部分,两个部分的轮面到偏心轮轮心的距离不同,轮面到轮心距离较大的一部分为长轴,轮面到轮心距离较小的一部分为短轴,长轴中与轮心距离最远的轮面为长轴最远端。
17、(1)当偏心轮驱动装置参与驱动运载底座运动:
18、步骤1:驱动偏心轮转动,且偏心轮旋转方向朝向运行方向;承载单元的的偏心轮的长轴与地面接触,承载运载体重量;铺轨单元的偏心轮短轴朝向地面,即其悬空或与地面接触。
19、若偏心轮短轴与地面接触,则通过铺轨单元的偏心轮驱动装置和/或运载底座驱动装置驱动运载底座运动实现铺轨;
20、若偏心轮短轴悬空,则仅通过运载底座驱动装置驱动运载底座运动实现铺轨;
21、运载体通过运载体驱动装置和/或承载单元的运载底座驱动装置驱动运行;在以承载单元的运载底座驱动装置驱动时,运载体上设置有运载体驱动装置。
22、步骤2:随着偏心轮的旋转,步骤1中的承载单元的偏心轮的长轴逐渐向短轴方向转动,支撑组件对运载体的支撑力减弱或消失;
23、承载单元的偏心轮长轴向短轴方向转动的过程中,若转动过程中偏心轮始终与地面接触,则偏心轮与地面之间的摩擦力为与偏心轮连接的运载底座提供的沿运行方向的推力,而承载单元的运载底座驱动装置从与运载体驱动装置一起或单独驱动运载体运动逐渐转变为与推力一起或单独驱动运载底座的运动,实现承载单元到铺轨单元的转变;
24、若转动过程中偏心轮逐渐脱离地面,则承载单元的运载底座驱动装置从与运载体驱动装置一起或单独驱动运载体运动逐渐转变为驱动运载底座的运动,实现承载单元到铺轨单元的转变;
25、步骤1中的铺轨单元的偏心轮短轴向长轴方向转动的过程中,铺轨单元对运载体的支撑力逐渐增大;
26、铺轨单元的偏心轮短轴向长轴方向转动的过程中,偏心轮与地面之间的摩擦力为与偏心轮连接的运载底座提供沿运行方向的推力,而铺轨单元的运载底座驱动装置从驱动运载底座运动逐渐转变为与运载体驱动装置一起或单独驱动运载体运动,实现铺轨单元到承载单元的转变;
27、步骤1和步骤2循环往复实现不同运载单元的交替铺轨和承载,从而实现运载底座和运载体的运动。
28、当铺轨单元的偏心轮短轴向长轴方向转动的过程中,在长轴接触地面之前停止该偏心轮的驱动,通过偏心轮的惯性带动偏心轮的长轴与地面接触,当偏心轮的长轴最远端与地面接触时,为运载体提供的支撑力最大,使铺轨单元逐渐转变为承载单元。
29、(2)当偏心轮驱动装置不参与驱动运载底座运动,仅用于带动偏心轮完成长轴短轴的交替时:
30、当偏心轮转动过程中短轴不与地面接触,则当短轴朝向地面时,通过偏心轮驱动装置驱动偏心轮短轴向长轴方向转动,使偏心轮长轴与地面接触实现承载。
31、当偏心轮转动过程中短轴与地面接触,且短轴与地面之间的摩擦力足以推动偏心轮从短轴向长轴方向转动,则可不设置偏心轮驱动装置;
32、当偏心轮转动过程中短轴与地面接触,且短轴与地面之间的摩擦力不足以驱动偏心轮短轴向长轴方向转动,则通过偏心轮驱动装置驱动偏心轮短轴向长轴方向转动,使偏心轮长轴与地面接触。
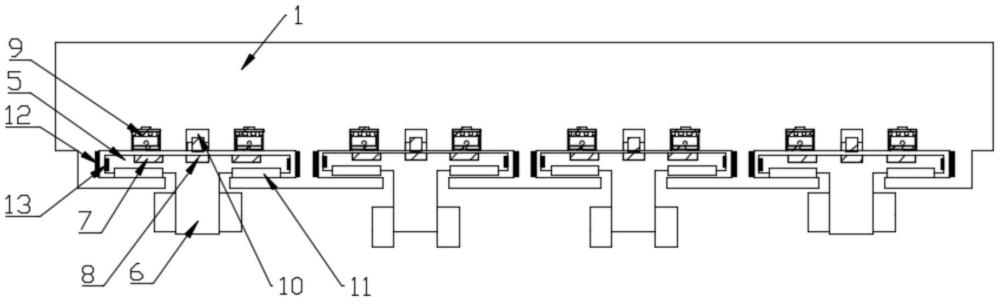
33、一种自铺轨式偏心轮运载装备,包括:
34、运载体;
35、运载底座;
36、运载体驱动装置;
37、运载底座驱动装置;
38、偏心轮组件;
39、所述运载底座设置偏心轮组件,所述偏心轮组件至少含有一个偏心轮,所述偏心轮包括长轴和短轴;
40、所述运载底座驱动装置包括相互配合的电机初级和电机次级,所述电机初级和电机次级分别设置在运载底座和/或运载体上;所述运载底座驱动装置和/或偏心轮组件驱动运载底座铺轨;通过不同的偏心轮组件的交替铺轨和承载以及运载体的运动实现运载装备的自铺轨运行。
41、采用该技术方案后,本技术方案通过偏心轮的长轴和短轴交替朝向地面,实现支撑力的调节,以自动完成承载和铺轨的交替,实现自铺轨运行。
42、作为优选,还包括偏心轮驱动装置,所述偏心轮驱动装置与偏心轮连接,用于驱动偏心轮旋转,所述偏心轮驱动装置和/或运载底座驱动装置驱动运载底座铺轨。
43、当偏心轮组件设置偏心轮驱动装置时,可以省略运载体驱动装置,通过偏心轮驱动装置带动运载底座铺轨,利用运载底座驱动装置驱动运载体运动。
44、采用该技术方案后,本技术方案中偏心轮驱动装置可驱动偏心轮旋转,当偏心轮的短轴朝向地面后,若偏心轮转动过程中短轴不与地面接触,则通过偏心轮驱动装置驱动偏心轮短轴向长轴方向转动,使偏心轮长轴与地面接触;当偏心轮转动过程中短轴与地面接触,且短轴与地面之间的摩擦力不足以驱动偏心轮转动至长轴,则也可以通过偏心轮驱动装置驱动偏心轮从短轴向长轴方向转动,使偏心轮长轴与地面接触实现承载。
45、当偏心轮短轴可以与地面接触,则运载单元铺轨时,偏心轮转动过程中与地面的摩擦力会推动运载底座向运行方向铺轨,当该推力足够大时,可不启动运载底座驱动装置即可实现驱动运载底座铺轨,当推力不够大时,该推力与运载底座驱动装置一起推动运载底座铺轨。
46、作为优选,一个运载底座至少设置一个偏心轮组件,至少一个偏心轮组件和至少一个运载底座构成一个运载单元,运载单元分为承载单元和铺轨单元,至少一个承载单元和至少一个铺轨单元形成一个运载模组;
47、当运载模组只包括一个承载单元和一个铺轨单元时,该运载模组的承载单元和铺轨单元横向平行布置或纵向平行布置,两个运载单元在承载和铺轨之间交替进行;当所述运载模组包括多个承载单元和/或多个铺轨单元时,承载单元和铺轨单元可进行横向组合、纵向组合以及横纵向交叉组合布置。
48、所述交叉组合布置是指:运载单元在横向上或纵向上交叉组合排列。
49、作为优选,所述运载底座包括支撑作用部和偏心轮连接部,所述支撑作用部与运载体之间设置支撑组件;所述支撑组件设置在运载体和/或运载底座的支撑作用部上,偏心轮连接部连接偏心轮组件。
50、作为优选,所述支撑组件为机械支撑组件和/或磁悬浮支撑组件。
51、作为优选,所述磁悬浮支撑组件包括垂向悬浮支撑组件和/或横向悬浮支撑组件;
52、所述垂向悬浮支撑组件包括可配合产生悬浮力的第一垂向悬浮磁体和第二垂向悬浮磁体,所述第一垂向悬浮磁体垂向设置于所述支撑作用部上,所述第二垂向悬浮磁体垂向设置于所述运载体上;
53、所述横向悬浮支撑件包括可配合产生悬浮力的第一横向悬浮磁体和第二横向悬浮磁体,所述第一横向悬浮磁体横向设置于所述运载体上,所述第二横向悬浮磁体横向设置于所述支撑作用部上。
54、作为优选,所述机械支撑组件包括滚柱和/或滚珠,所述滚柱和/或滚珠设置在支撑作用部和/或运载体上。
55、采用该技术方案后,通过在运载体底部以及支撑作用部上设置垂向悬浮支撑组件,其中垂向悬浮支撑组件可为机械支撑或磁悬浮支撑,机械支撑可为滚珠支撑或滚柱支撑,垂向悬浮支撑组件可优选为可控磁悬浮组件,这样可以通过控制其磁力有无和大小进行垂向悬浮的调节。通过垂向悬浮支撑组件相互配合实现运载体在垂向上的支撑,保持运载体在垂向上的稳定,并降低运载装备的滚动阻力,从而达到节约能耗的效果,此外,由于采用垂向悬浮支撑组件,使运载体在垂向上实现独立的运动,从而实现了运载体在垂向上的解耦。
56、本发明通过第一垂向悬浮磁体和第二垂向悬浮磁体实现对运载体垂向的悬浮,需要说明的是,所述第一垂向悬浮磁体和第二垂向悬浮磁体相对应设置,使重合面积最大,增强在垂向上的悬浮效果;且第一垂向悬浮磁体和第二垂向悬浮磁体均为永磁体、超导磁体以及电磁体中的一种,三种磁体可以随意组合,只要能使运载体在运载底座上实现悬浮即可。
57、而将第一垂向悬浮磁体和第二垂向悬浮磁体设置为磁悬浮组件有两方面原因,一方面为了配合两组运载单元实现支撑运载体重量和铺轨的交替进行,具体来说,通过偏心轮的转动控制第一垂向悬浮磁体和第二垂向悬浮磁体的间距,从而调节运载体与支撑作用部之间的悬浮力大小,运载底座驱动装置驱动完全不承重或承重较小的运载底座铺轨,实现承重到铺轨或铺轨到承重的交替;另一方面,当采用电磁体时,可与通过控制电磁体产生不同大小的悬浮力,适应不同地形以及运载体重量,提高运载体的稳定性。当采用超导磁体时,通过超导的钉扎效应可限制支撑作用部的横向位移,以此可不设置横向悬浮支撑组件,降低运载体和/或运载底座的重量。
58、作为优选,所述支撑组件包括横向悬浮支撑组件,所述横向悬浮支撑件包括可配合产生悬浮力的第一横向悬浮磁体和第二横向悬浮磁体,所述第一横向悬浮磁体横向设置于所述运载体,所述第二横向悬浮磁体横向设置于所述支撑作用部。
59、采用该技术方案后,通过在运载体底部以及运载底座之间设置横向悬浮支撑组件,约束运载体在横向上的运动,保证运载体的横向稳定性,从而实现了运载体在横向上的解耦。需要说明的是,所述第一横向悬浮磁体和第二横向悬浮磁体相对应设置,使重合面积最大,增强横向稳定效果;且第一横向悬浮磁体和第二横向悬浮磁体均为永磁体、超导磁体以及电磁体中的一种,三种磁体可以随意组合。优选为第一横向悬浮磁体和第二横向悬浮磁体均为永磁体,可节省能耗。
60、作为优选,在运载体和运载底座之间设置安装结构,安装结构包括安装槽和安装块,所述安装槽设置在运载体或运载底座上,配合的安装块设置在运载底座或运载体上,在所述安装结构中布设运载底座驱动装置和支撑组件。
61、采用该技术方案后,通过设置安装槽和安装块来连接运载体和运载底座,可在运载体底部开设安装槽,在运载底座上设置有安装块;也可在运载底座开设安装槽,在运载体上设置有安装块,运载底座驱动装置和支撑组件均设置于安装结构内提高了空间的利用效率,简化了结构设计,便于模块化匹配和生产。
62、作为优选,所述运载体驱动装置为设置在运载体上的喷气装置。
63、采用该技术方案后,本技术方案中将喷气装置作为驱动运载体运动的动力源,以较小的动力达到运载体驱动的目的,以实现运载体和运载底座的解耦驱动。
64、作为优选,运载单元的运载底座设置有多个时,多个运载底座沿运载体纵向对称布置。
65、采用该技术方案后,多个运载底座沿运载体纵向对称布置使运载体在运行过程中可以实现稳定的支撑和铺轨,不会产生倾斜。
66、作为优选,运载底座上设置有防止运载底座脱离运载体的限位组件,限位组件可以是设置在运载底座上的凸块或者在运载底座或运载体上分别设置滑块或滑槽,只要能保证运载底座在运行过程中不会脱离车体即可;通过限位组件可以避免发生颠簸或故障等极端情况时运载底座和运载体分离。
67、本发明具有如下的优点和有益效果:
68、1.本发明通过偏心轮的长轴和短轴交替朝向地面,实现支撑力的调节,以自动完成承载和铺轨的交替,实现自铺轨运行,解决了现有磁悬浮汽车只能提前铺设好轨道,成本高且适用受限的问题。
69、2.本发明中由承载单元主要承受运载体的重量,则铺轨单元铺轨时不承重或承受小部分重量,以此节省了铺轨单元铺轨时所需的驱动力。
70、3.本发明中当偏心轮短轴可以与地面接触,运载单元铺轨时,偏心轮转动过程中与地面的摩擦力会推动运载底座向运行方向运动,当该推力足够大时,可不启动运载底座驱动装置即可实现驱动运载底座铺轨,当推力不够大时,该推力与运载底座驱动装置一起推动运载底座铺轨,可有效节省铺轨所需的驱动力。
71、4.本发明中承载单元的运载底座驱动装置可驱动运载体运动,可不需要再单独布设运载体驱动装置,可降低运载体的生产成本。
72、5.本发明中以直线电机直接驱动,带动运载底座实现“自铺轨”的驱动形式,以直线电机作为动力源之一,实现驱动系统与悬浮系统高度分离,降低结构复杂度。
本文地址:https://www.jishuxx.com/zhuanli/20241120/334538.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表