一种管道外爬行检测机器人的制作方法
- 国知局
- 2024-11-21 11:44:36
本发明涉及机器人,特别涉及一种爬行机器人。
背景技术:
1、管道外爬行机器人的研究背景可以追溯到20世纪初,当时工程师们开始意识到传统的管道检测和维护方法存在一些困难和局限性。传统的方法通常需要人工进入管道内部进行检测和修复,这不仅效率低下,而且存在安全风险。因此,研究人员开始探索开发一种能够在管道外表面移动的机器人系统,以替代传统的方法。
2、管内和管外是管道机器人的两个研究方向,起初人民普遍把注意力更多地集中在管内机器人的发展,对于管外机器人的研究少之又少。但是随着管道高空作业,电线电缆的设施的维修和保护等工作量的增加,管道外爬行机器人的研究越来越获得人们的重视。
3、随着科技的进步,管外机器人的研究获得了显著的成就。现在的管道外爬行机器人可以通过各种传感器来检测管道的状况,包括:温度、压力、水温等信息,并且可以直接传输到计算机上进行实时反馈;同时,现在的管道外爬行机器人可以携带一定数量的工具,比如摄像头、激光切割器等工具,可以用来检查和维修管道。相比于城市区域用于居民的管道,更加复杂危险的是工业管道,工业管道是重要的运输工具,可能会长期的输送高温、高压、有毒、辐射的液体,如果发生泄漏事故,将会造成重大的人员伤亡和财产损失。而且工业管道所处环境复杂,人工检测难度大,研究设计代替人工作业的管道外爬行机器人,具有重要的工程应用前景。
技术实现思路
1、有鉴于此,本发明的目的是提供一种管道外爬行检测机器人,以解决在管道外进行爬行的技术问题。
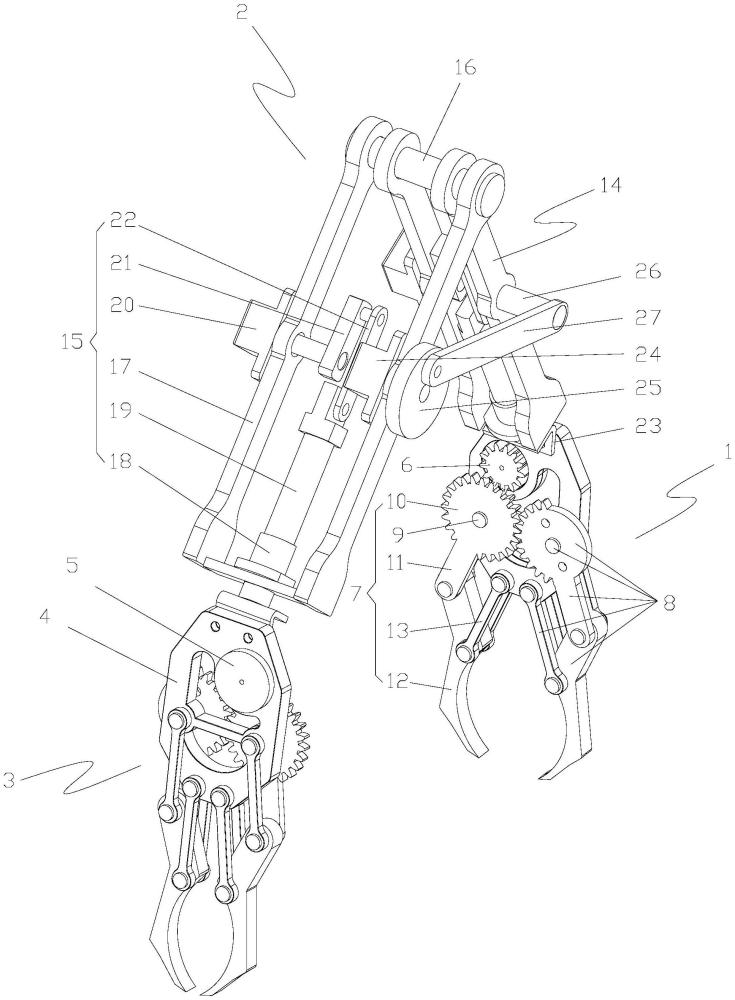
2、本发明管道外爬行检测机器人包括前夹抱装置、机身和后夹抱装置;
3、所述前夹抱装置和后夹抱装置的结构相同,前夹抱装置和后夹抱装置均包括基板、固定在基板上的第一电机、连接在第一电机转轴上的驱动齿轮、平行四边形联动左爪机构和平行四边形联动右爪机构;
4、所述平行四边形联动左爪机构和平行四边形联动右爪机构的结构相同,平行四边形联动左爪机构和平行四边形联动右爪机构均包括固定在基板上的齿轮轴、与齿轮轴转动连接的从动齿轮、与从动齿轮固定连接的驱动杆、端部与驱动杆铰接的管道夹抱爪和两端分别铰接在基板及管道夹抱爪中部上的从动杆,所述管道夹抱爪与管道配合的部分为弧形;
5、所述平行四边形联动左爪机构的从动齿轮和平行四边形联动右爪机构的从动齿轮啮合,且所述驱动齿轮还与平行四边形联动左爪机构的从动齿轮或者平行四边形联动右爪机构的从动齿轮啮合;
6、所述机身包括长度能伸缩的前躯干和长度能伸缩的后躯干,前躯干和后躯干的上端通过横轴铰接形成倒v形结构,所述前躯干的下端与前夹抱装置连接,所述后躯干的下端与后夹抱装置连接;所述机身还包括用于驱动前躯干和后躯干绕横轴旋转的转动驱动机构。
7、进一步,所述前躯干和后躯干的结构相同,且前躯干和后躯干均包括干体和与干体连接的伸缩杆机构,前躯干和后躯干的干体上端通过横轴铰接,所述伸缩杆机构包括设置在干体下端的导向套、与导向套滑动配合的伸缩杆、设置在干体上的第二电机、与第二电机的转轴连接的曲柄、以及一端与曲柄铰接另一端与伸缩杆的上端铰接的连杆,所述前躯干的伸缩杆下端通过v形块与前夹抱装置的基板连接,所述后躯干的伸缩杆下端通过另一个v形块与后夹抱装置的基板连接。
8、进一步,所述转动驱动机构包括设置在后躯干的干体上的第三电机、与第三电机的转轴连接的凸轮、设置在前躯干的干体上的传动轴、以及一端与凸轮铰接另一端与传动轴铰接的传动。
9、本发明的有益效果:
10、1、本发明管道外爬行检测机器人,其利用前夹抱装置和后夹抱装置交替抱紧管道和机身伸缩来实现沿管道爬行,爬行可靠性高;且机身的伸缩功能使得其具有良好的越障能力。并且本发明管道外爬行检测机器人的结构较简单,维护方便,成本较低。
11、2、本发明管道外爬行检测机器人的机身还具有转动驱动机构,该机构使得本管道外爬行检测机器人能在l形弯折的管道上爬行,进一步提高了其适应性。
技术特征:1.一种管道外爬行检测机器人,其特征在于:包括前夹抱装置、机身和后夹抱装置;
2.根据权利要求1所述的管道外爬行检测机器人,其特征在于:所述前躯干和后躯干的结构相同,且前躯干和后躯干均包括干体和与干体连接的伸缩杆机构,前躯干和后躯干的干体上端通过横轴铰接,所述伸缩杆机构包括设置在干体下端的导向套、与导向套滑动配合的伸缩杆、设置在干体上的第二电机、与第二电机的转轴连接的曲柄、以及一端与曲柄铰接另一端与伸缩杆的上端铰接的连杆,所述前躯干的伸缩杆下端通过v形块与前夹抱装置的基板连接,所述后躯干的伸缩杆下端通过另一个v形块与后夹抱装置的基板连接。
3.根据权利要求1所述的管道外爬行检测机器人,其特征在于:所述转动驱动机构包括设置在后躯干的干体上的第三电机、与第三电机的转轴连接的凸轮、设置在前躯干的干体上的传动轴、以及一端与凸轮铰接另一端与传动轴铰接的传动杆。
技术总结本发明公开了一种管道外爬行检测机器人,其包括前夹抱装置、机身和后夹抱装置;前夹抱装置和后夹抱装置的结构相同,前夹抱装置和后夹抱装置均包括基板、固定在基板上的第一电机、连接在第一电机转轴上的驱动齿轮、平行四边形联动左爪机构和平行四边形联动右爪机构;机身包括长度能伸缩的前躯干、长度能伸缩的后躯干和转动驱动机构。本发明管道外爬行检测机器人,其利用前夹抱装置和后夹抱装置交替抱紧管道和机身伸缩来实现沿管道爬行,爬行可靠性高;且机身的伸缩功能使得其具有良好的越障能力。并且本发明管道外爬行检测机器人的结构较简单,维护方便,成本较低。技术研发人员:倪颖倩,陶磊,熊乙锟,颜宇,孙运铎,朱孙科受保护的技术使用者:重庆市计量质量检测研究院技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/332677.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表