可控吸附力的磁吸附式爬壁机器人的制作方法
- 国知局
- 2024-11-19 10:00:03
本发明涉及机器人,具体的涉及一种可控吸附力大小的磁吸附式爬壁机器人。
背景技术:
1、磁吸附爬壁机器人利用磁力实现对金属表面的附着和移动,运用于多种领域,如石化厂储罐、船舶船体、大型桥梁和高层建筑的表面检查、清洗和维修,在放射性环境或其他危险环境中代替人工进行检查和维修,保障人员安全。机器人需要足够的磁力来保持附着,但过强的吸附力会增加移动难度和能耗,同时机器人需具备较高的灵活性以适应各种复杂表面。通常使用永久磁铁或电磁铁产生磁力,以实现对金属表面的吸附。永久磁铁具有持续吸附力,但无法调节吸附强度。电磁铁可以通过调节电流来控制吸附力,当电量不足或者突然断电时,爬壁机器人会失去吸附力,从而产生掉落的危险。
2、针对上述不足,有必要对磁吸附式爬壁机器人继续进行改进,以期满足多重应用需求。
技术实现思路
1、本发明旨在提出一种可控吸附力的磁吸附式爬壁机器人,能够吸附在金属表面进行作业,并可装配不同功能,能够调节吸附力的大小,以便提高机器人的机动性。
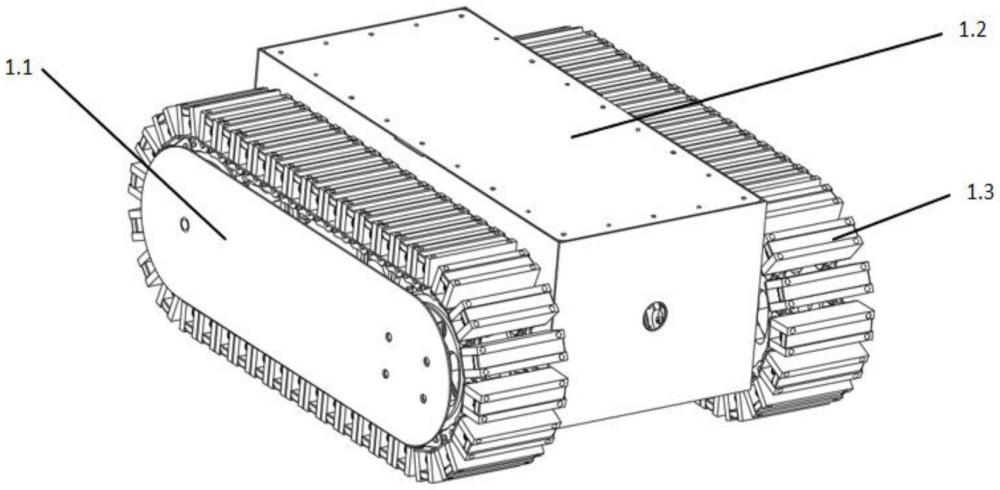
2、本发明提出的一种可控吸附力的磁吸附式爬壁机器人,主要包括电滑环、双排链条、永磁铁、电磁铁、衔铁、主体支架、电源模块、驱动电机和电机减速器。
3、主体支架;
4、驱动电机,所述的两个驱动电机安装在机体内通过与电源模块相接,为机器人提供动力;
5、电机减速器,所述的减速箱安装在每个驱动电机输出轴后,以便于匹配转速和传递转矩;
6、电源模块,与外部电源链接,为电机和电滑环提供能源;
7、双排链条,所述的双排链条包括两个结构相同的左右链条,分别通过传动轴,传动链轮与电机减速器输出轴相连,所述的链条上有吸附力可调的吸附单元,用于形成可调的磁吸附力;
8、电滑环,所述的电滑环安装在机器人两个侧面的机体上,对运行状态下链条上的电磁铁供电;
9、衔铁,所述的衔铁固定电磁铁与永磁铁,同时与电磁铁,永磁铁形成磁回路。
10、永磁铁,所述的永磁铁位于双排链条上,由衔铁夹持固定,为机器人提供稳定不变的吸附力;
11、电磁铁,所述的电磁铁位于双排两条上,由衔铁夹持固定,通过衔铁与永磁铁形成磁回路,改变磁吸附力;
12、所述的履带机构包括左右两条履带,每条履带都由双排链条,传动链轮,传动轴,轴承组成,传动轴每一侧都前后装配,再与传动链轮连接,再与所述的双排链条形成履带传动机构。
13、所述的驱动力由位于机器人前方的传动轴与减速器输出轴相连提供,后方的传动轴起到支撑和从动的作用。
14、所述的可控吸附力的单元由两块衔铁,一块永磁体,一块电磁铁组成,衔铁将永磁铁和电磁铁夹在中间,永磁铁装在靠近吸附面的位置,但与吸附面存在一定间隙,避免与吸附面的直接接触,电磁铁装在靠近链条连接片的位置不与永磁体直接接触,从而形成磁场回路。
15、所述的电磁铁正负级都连接在电滑环上,在双排链条运动时,电滑环同时转动,为电磁铁供电。
16、本发明提供的机器人以永磁铁作为主要吸附手段,加上可控吸附力单元上的电磁铁,提高了机器人的负载能力;
17、相比传统永磁式履带爬壁机器人,本发明中使用的可控吸附力单元能够很好的切换吸附状态和调节吸附力,提高了爬壁机器人对于不同吸附面环境的适应能力;
18、相比于只用永磁体作为吸附手段的爬壁机器人,该可控吸附力的磁吸附式爬壁机器人能通过调整吸附力的大小,能够方便的从吸附面上取下。
技术特征:1.可控吸附力的磁吸附式爬壁机器人,其特征在于,包括:电滑环、双排链条、永磁铁、电磁铁、衔铁、主体支架、电源模块、驱动电机和电机减速器;
2.根据权利要求1所述的可控吸附力的磁吸附式爬壁机器人结构,其特征在于:两台电机分别驱动左右两排链条。
3.根据权利要求1所述的一种可控吸附力的磁吸附式爬壁机器人结构,其特征在于:机器人左右履带都由双排链条组成,每一节链条上都装配可控吸附力的单元。
4.根据权利要求3所述的一种可控吸附力的磁吸附式爬壁机器人结构,其特征在于:可控吸附力的单元包括永磁体,衔铁,电磁铁,永磁铁和电磁铁中间间隔一小段距离,左右两端由衔铁夹持固定,永磁铁的正负极与衔铁直接接触,电磁铁的通电磁极面也与衔铁直接接触,这样永磁体,两块衔铁,电磁铁形成一个磁回路。电磁铁正负极与电滑环连接。
5.根据权利要求4所述的一种可控吸附力的磁吸附式爬壁机器人结构,其特征在于:每个可控吸附力的单元都安装在双排两条的每一节上,机器人在运动时,随着双排链条的运动,可控吸附力单元也在相对于主体转动,此时电滑环同时以其相当的速度转动,完成对每个运动中的电磁铁的供电。
技术总结本专利公开了可控吸附力的磁吸附式爬壁机器人,主要包括传动齿轮、电滑环、双排链条、永磁铁、电磁铁、机体、履带侧向挡板、驱动电机和电机减速器等部分,利用电磁铁能够改变磁极的特性,通过控制电压的大小与方向,实现对磁路的控制,通过永磁体与电磁铁的搭配,实现吸附力可调,但又不会因为断电从而彻底失去吸附力,通过调节磁吸附力,机器人可以更精确地控制移动和操作,减少对表面的损坏,在需要承载更大负荷或运输重物时,机器人可以增加磁吸附力,以确保稳定性和安全性,从而提高负载能力和操作范围。电磁吸附单元的导电接头与机器人腔体內的多通路电滑环连接以实现对不断移动并转动的电磁铁的通电断电控制。技术研发人员:陈东良,王心哲,刘桂芳,杨若兰,曲颖,郝阴兴,杨志成,轩浩迪受保护的技术使用者:哈尔滨斑之斓海洋科技有限公司技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/331055.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。