一种桁架智能叉车及其控制方法与流程
- 国知局
- 2024-11-21 12:09:18
本发明属于装载机,具体涉及一种桁架智能叉车及其控制方法。
背景技术:
1、在科技和经济的双重推动下,物流业正在从传统物流向现代物流快速转型。在将商品从产地到消费地的移动过程中,涉及到的关于运输、保管、配送等多个环节的物流链向着自动化、信息化、智能化、无人化的方向演进。在物流链中,用于存储货物的仓库是其中重要的一个环节。
2、在公开号为“cn111846728b”的发明专利申请中,其公开了立体仓库出入库方法及装置、立体仓库,其中,立体仓库包括堆垛机和仓储单元,仓储单元包括沿第一方向设置的四排货架,每排货架沿第二方向延伸,中间两排货架间隔设置形成巷道,堆垛机位于待执行出入库任务的仓储单元的巷道内,靠近巷道的两排货架具有多个第一货位,远离巷道的两排货架具有多个第二货位,货位分配方法包括:确定仓储单元中所有满足出库条件的货位的最早入库时间;确定最早入库时间至最早入库时间加上预设时间段范围内所有满足出库条件的货位,作为符合最早入库时间段的货位集合;优先对货位集合中的各货位按照预设出库优先级顺序执行出库任务。虽然,立体库出库系统作为已经较为成熟的技术,应用也较为广泛,但是其一般设置于厂房内,并在在立体库出库系统的出口处设置门口,其无法将货物直接摆放在厂房门口外侧的货车上,只能通过叉车在厂房门口先将货物取下,并摆放至厂房门口的外侧,待货车抵达后,再利用叉车将摆放在厂房门口外侧的货物摆放至货车上,其需要占用较大的空间,货物的存放和后续叉车的摆放之间相互干扰,不利于叉车的移动,且效率较低。
3、在公开号为“cn115783816a”的发明专利申请中,其公开了一种自动装车机及装车方法,属于物流输送领域。本发明自动装车机,包括带式输送机传送系统,还包括并联机构、输送通道、桁架、桁架移动平台和激光雷达组成,所述输送通道的上部及下部分别设置上部气动开合门、下部气动开合门;输送通道设置在并联机构上,并联机构设置在桁架移动平台上,桁架移动平台在桁架上平移,带式输送机传送系统的末端与输送通道的上部气动开合门相衔接,激光雷达设置在桁架移动平台下方;输送通道为多节箱体铰接组成的贯通箱体通道。本发明中桁架移动平台能够带动皮带机输送系统、3upu-up并联机构、输送通道、激光雷达等在桁架上平移;通过在桁架上平移调整装车机构与车辆的相对位置,以便完成整车装车。但是,其仅能通过横架移动平台将货物从桁架的一端移动至另一端,其仍需要利用叉车在厂房门口先将货物取下,并摆放至厂房门口的外侧,待货车抵达后,再利用叉车将摆放在厂房门口外侧的货物摆放至货车上,其仍需要占用较大的空间,不利于货物的安全存放和摆放。
4、其中,需要设计一种桁架智能叉车及其控制方法,将货物稳定地夹持起来,并准确地摆放在货车上,避免出现硬碰撞出现货物掉落等意外情况的发生,以保证货物的安全摆放。
技术实现思路
1、为解决现有技术存在的不足,本发明提供了一种桁架智能叉车及其控制方法。
2、为实现上述目的,本发明提供了以下技术方案:
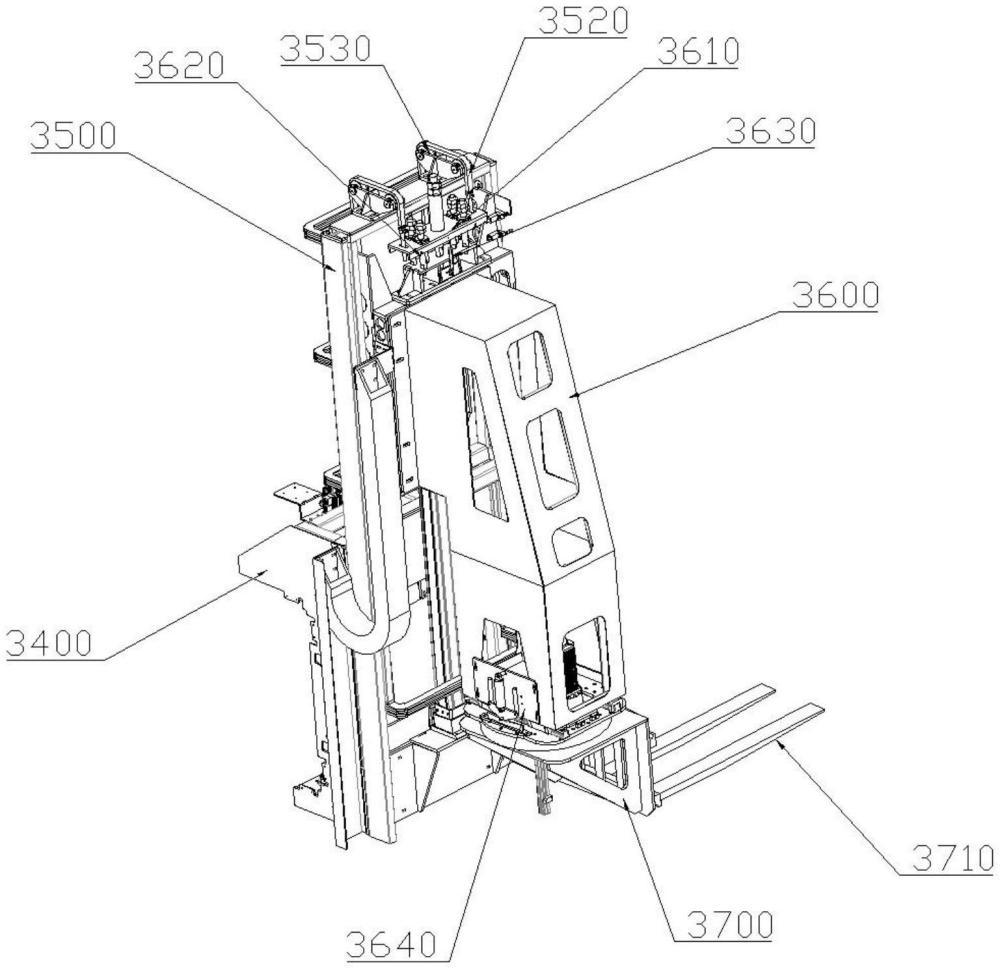
3、一种桁架智能叉车,所述桁架智能叉车设置于所述桁架移动架的上端,所述桁架智能叉车包括第二y轴移动机构、第二z轴移动机构、第二r轴移动机构和第二叉齿,所述第二y轴移动机构设置于所述第一横架的上端,所述第二z轴移动机构设置于所述第二y轴移动机构的后端,所述第二r轴移动机构设置于所述第二y轴的下端,所述第二叉齿设置于所述第二r轴移动机构的下端,所述第二y轴移动机构包括第三支撑架、第七驱动电机和第五齿条,所述第一横架上设有第五滑轨,所述第三支撑架上设有第五滑块,所述第五滑块与所述第五滑轨相匹配,所述第七驱动电机设置于所述第三支撑架的上端,所述第七驱动电机的下端设有第六齿轮,所述第五齿条设置于所述第一横架的上端,所述第六齿轮与所述第五齿条相匹配。
4、进一步地,所述第二z轴移动机构包括第一牵引带、第四支撑架、第一液压缸和智能叉车架,所述第三支撑架的两端设有第二限位槽,所述第四支撑架的两端设有第二滚轮,所述第二滚轮与所述第二限位槽相匹配,所述第一液压缸的一端与所述第三支撑架相连接,所述第一液压缸的另一端与所述第四支撑架相连接,所述第四支撑架的两端设有第三限位槽,所述智能叉车架的两端设有第三滚轮,所述第三滚轮与所述第三限位槽相匹配,所述第四支撑架的上端设有第一定向轮,所述第一牵引带与所述第一定向轮相匹配,所述第一牵引带的一端与所述第三支撑架相连接,所述第一牵引带的另一端与所述智能叉车架相连接。
5、进一步地,所述智能叉车架的下端设有防撞机构,所述防撞机构包括第一弹簧杆、第一支撑板、第一回位板、第一安装板和第二安装板,所述智能叉车架的下端设有第六滑块,所述第一支撑板的上端设有第六滑轨,所述第六滑块与所述第六滑轨相匹配,所述第一安装板设置于所述智能叉车架的下端,所述第一安装板的两端设有第一导向块,所述第一导向块内设有第一导向杆,所述第一回位板的两端与所述第一导向杆的下端相铰接,所述第一回位板的下端设有第一回位滚轮,所述第二安装板设置于所述第一支撑板的上端,所述第二安装板的上端设有第一v型口,所述第一v型口与所述第一回位滚轮相匹配,所述第一弹簧杆的一端与所述第一安装板相铰接,所述第一弹簧杆的另一端与所述智能叉车架相铰接。
6、进一步地,所述第二r轴移动机构包括第八驱动电机和第五支撑架,所述第五支撑架通过轴承设置于所述第一支撑板的下端,所述第八驱动电机设置于所述第一支撑板的上端,所述第八驱动电机的下端设有第七齿轮,所述第五支撑架的上端设有第二内齿轮,所述第七齿轮与所述第二内齿轮相匹配,所述智能叉车架的下端设有第一让位口,所述第一让位口与所述第八驱动电机相匹配,所述第二叉齿设置于所述第五支撑架上。
7、进一步地,所述智能叉车架的上端设有称重机构,所述称重机构包括第二支撑板和若干称重传感器,所述第二支撑板设置于所述智能叉车架的上方,所述称重传感器的一端与所述第二支撑板相连接,所述称重传感器的另一端与所述智能叉车架相连接。
8、进一步地,所述第五支撑架的下端设有第二扫描机构,所述第二扫描机构包括第一安装杆和第二激光扫描器,所述第一安装杆设置于所述第二支撑板的下端,所述第二激光扫描器设置于所述第一安装杆的下端,所述第五支撑架的上端设有第二让位口,所述第二让位口与所述第一安装杆相匹配。
9、一种桁架智能叉车的控制方法,包括以下步骤:
10、步骤s1:转运装置(2000)将货物(4100)运送至其准确摆放位置所对应的小车轨道(2300)位置后,利用第二y轴移动机构、第二z轴移动机构、第二r轴移动机构驱动第二叉齿(3710)叉起货物(4100);
11、步骤s2:利用第二y轴移动机构、第二z轴移动机构、第二r轴移动机构驱动第二叉齿,将货物(4100)放置在其准确摆放位置所对应的货车(4000)具体位置,重复步骤s1,直至对应货车(4000)所分析确认的货物(4100)完全装载。
12、进一步地,所述步骤s1包括以下步骤:
13、步骤s1.1:第二叉齿(3710)叉起货物(4100)后,利用称重传感器(3620)称重,并与货物(4000)的预设范围值进行比较;
14、当称重传感器(3620)所称重的货物(4000)的重量处于货物(4000)的预设范围值之内时,执行步骤s2,当称重传感器(3620)所称重的货物(4000)的重量不处于货物(4000)的预设范围值之内时,报警通知工作人员,并执行步骤s1.2;
15、步骤s1.2:利用拉力传感器(3630)测量第二支撑板和智能叉车架之间的拉力,并将之与拉力预警值比较,当拉力传感器(3630)所测量的拉力超过拉力预警值时,将第二叉齿(3710)下降放下货物(4000)。
16、本发明公开的一种桁架智能叉车及其控制方法,与现有技术相比,其有益效果在于:其能将货物从中转小车上夹持起来,并准确地摆放在货车上,并且,桁架智能叉车上设有防撞机构,能够避免第二叉齿与其他物体接触时发生硬碰撞,可以起到缓冲并能够回位,可以避免货物出现直接摔落等情况,更加安全。
本文地址:https://www.jishuxx.com/zhuanli/20241120/334575.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
粉料打包装置的制作方法
下一篇
返回列表