计及电气测量信息的城轨机车位置估计方法
- 国知局
- 2024-11-21 12:19:05
本发明涉及电力系统调度自动化,电力系统可包含可再生能源的电力供应,尤其是计及电气测量信息的城轨机车位置估计方法。
背景技术:
1、目前,工程中采用的城市轨道交通机车定位方法主要是基于轨旁设备的区段定位方式,但是受采样频率的影响,区段识别结果存在较强的滞后性,且无法用明确的规则确定机车所处的具体位置,定位精度较低。针对机车定位的研究多采用基于多传感器数据融合的组合定位方法,但是由于城轨机车基本运行于地下、隧道等特殊环境,传感器信号容易受到干扰和遮挡导致信号丢失,此类算法在实际应用中存在较大困难。同时,当前缺乏从电气量测的视角展开机车定位的相关研究,而在牵引供电系统的电路等效模型中,机车位置主要影响各支路的电阻值。因此,通过构建牵引供电系统电路等效模型,并利用系统内的电气量测量,如节点电压、馈线电流等,求解各支路的电阻值,即可有效获得机车的位置,根据电路理论可进一步推导获得多等式关系。然而,由于实际量测中存在噪声,求解结果并非完全准确,需要进一步考虑其处理方式。
技术实现思路
1、本发明提出计及电气测量信息的城轨机车位置估计方法,基于电路约束和机车运行过程,充分分析电气量测与机车位置间的多耦合关系,进一步考虑量测和建模误差,寻求城轨机车位置的最优估计方法;能弥补现有缺乏从电气量测视角开展机车定位的缺陷,获得有效且实用的城轨机车定位方法。
2、本发明采用以下技术方案。
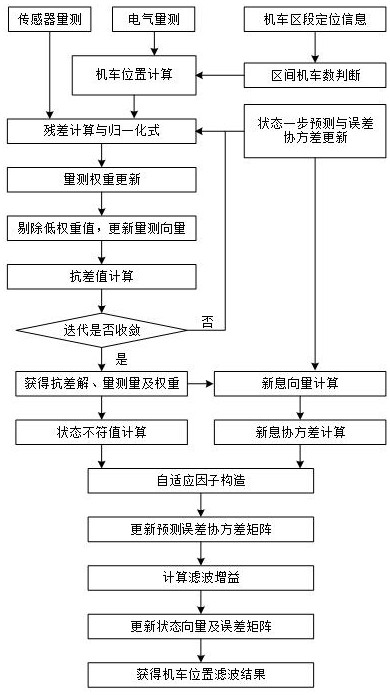
3、计及电气测量信息的城轨机车位置估计方法,所述方法建立计及电气测量信息的城轨机车位置估计模型时,首先根据机车区段定位结果确定相邻牵引所间在运行机车的数量,并构建不同机车数量下的牵引供电系统电路等效模型;再基于电路定理分析机车位置与牵引供电系统内各电气量测值之间的多等式关系,获取机车位置计算值并作为位置量测的补充;然后考虑量测误差和建模误差的影响,结合机车运行过程,以基于抗差自适应卡尔曼滤波的城轨机车位置估计方法进行机车位置的最优估计。
4、所述方法包括以下步骤;
5、步骤s1、以基于计轴器和应答器的轨旁设备的机车区段定位结果为依据,获取相邻牵引所间的机车数量;
6、步骤s2、以相邻牵引所划分区间,构建区间内含不同机车数的牵引供电系统电路等效模型;
7、步骤s3、基于电路理论分析牵引供电系统内电气量测值与区间内机车位置的相关性,获得机车位置计算式;
8、步骤s4、构建基于卡尔曼滤波的城轨机车位置估计模型,将步骤s3获得的机车位置计算值添加至量测值中;
9、步骤s5、考虑量测误差影响,基于抗差估计思想辨识量测值中的不良数据并剔除,同时降低低质量数据的影响;
10、步骤s6、考虑建模误差影响,构造自适应调节因子作用于估计模型中,实现机车位置的最优估计,并输出估计结果。
11、步骤s1包括以下步骤;
12、步骤s11、从机车自动监控系统中实时获取牵引供电系统内在运行机车所处的区段位置信息;
13、步骤s12、获取各区段和牵引所的物理位置信息,根据机车所处的区段位置获得相邻牵引所之间的在运行机车数量。
14、步骤s2具体包括以下步骤:
15、步骤s21:将牵引所与机车均视为电源节点,各节点间的接触网和钢轨视为支路,各支路电阻为:
16、 公式一;
17、式中, rc和 rr分别为接触网和铁轨的支路电阻; rc和 rr分别为接触网和铁轨的单位长度电阻值; l为支路长度,即相邻节点的距离;下标 i表示支路编号;
18、步骤s22:忽略钢轨与大地间的纵向电阻和杂散电流,合并相邻节点间的 rc与 rr,进一步构建不同机车数量下的牵引供电系统链式电路模型。
19、步骤s3具体包括以下步骤:
20、步骤s31:利用牵引所电压 utss、机车电压 utrain和馈线电流 i的电气量,根据电路定理,建立区间内机车位置与各电气量测值间的多耦合关系,其公式形式为:
21、 公式二;
22、式中, m为机车到区间首端牵引所的距离; l为相邻牵引所间的距离;
23、步骤s32:当区间内上下行均有一辆机车时,上行机车相对于前端牵引所的位置为:
24、 公式三;
25、式中,, u1、 u2、 u3、 u4分别为首末端牵引所的电压和上下行机车的电压, i1、 i2、 i3、 i4为首末端牵引所引出的四条馈线电流;
26、步骤s33:区间内含其余机车数的情况与上述类似,需额外添加或删除机车电压值,馈线电流不变。
27、步骤s4具体包括以下步骤:
28、步骤s41:取状态变量 x和量测量 z分别为:
29、
30、式中, m为全部机车的位置向量; v为全部机车的速度向量; z m,mea为全部机车的位置传感器量测值向量; z v,mea为全部机车的速度量测向量;
31、步骤s42:状态转移方程和量测方程分别以公式表示为:
32、
33、式中, i和0分别为单位矩阵和零矩阵;为时间间隔; a为全部机车的加速度量测向量; f、 b分别为状态转移矩阵和控制矩阵; u为控制向量; h为量测矩阵,仅当量测量与状态量描述相同的机车状态信息时,矩阵内相应元素为1,其余为0,是一个稀疏矩阵; w和 v分别表示过程噪声和量测噪声,是满足均值为零、协方差分别为 q和 r的高斯白噪声;下标 t表示时刻;
34、步骤s43:基于卡尔曼滤波的位置估计模型,包括预测和更新两个步骤,以公式表述为:
35、
36、式中,分别表示预测值向量、预测误差协方差矩阵和状态转移协方差矩阵;和 p分别表示估计值向量和估计误差协方差矩阵; r表示量测误差协方差矩阵; k表示卡尔曼增益矩阵。
37、步骤s5具体包括以下步骤:
38、步骤s51:任意时刻量测残差向量为 v,量测量的权矩阵为 b,等价权矩阵为,各量测相互独立,有:
39、
40、式中, n表示量测值的个数; ω i表示等价权因子,可由等价权函数确定;采用iggⅲ等价权函数:
41、
42、式中,分别表示第 i个量测残差值及其标准化残差,省略时刻下标 t; c0和 c1为调和系数;
43、步骤s52:任意时刻以预测值作为抗差估计迭代初值,获得残差初值为:
44、 公式十七;
45、步骤s53:将不同机车位置的量测值分开处理,对于同一机车位置的所有量测残差,取绝对值后在预测值对应的量测残差处进行归一化处理,进一步统一误差衡量标准:
46、 公式十八;
47、式中,上标 p表示机车编号,省略迭代数上标( k)和时刻下标 t;在首次迭代时有;
48、步骤s54:以归一化后传感器量测残差最小值作为调和系数 c0和 c1的选取依据:
49、 公式十九;
50、步骤s55:获得各量测值的等价权因子 ω i并剔除 ω i<0.1的量测值;
51、步骤s56:抗差估计结果通过迭代式解算:
52、 公式二十;
53、式中,上标 k表示迭代次数,以下类似;当时停止迭代,得到当前时刻的抗差解,为一个极小值;
54、步骤s57:保持初始权重,即,运算迭代式,直到满足收敛条件,保留的量测值具有新的等价权因子;
55、步骤s58:利用式计算各量测最新的等价权作为后续滤波过程的量测值权重,同时运算式获得当前时刻的抗差解。
56、步骤s6具体包括以下步骤:
57、步骤s61:新息向量为实际的量测值与量测预测值间的误差向量,即:
58、 公式二十一;
59、新息的理论协方差矩阵和实际协方差矩阵分别为:
60、
61、式中, n为滑动窗口长度;
62、步骤s62:构造自适应因子 α1 t为:
63、
64、式中,表示矩阵的迹;
65、步骤s63:修正式和得到:
66、
67、式中,为增倍系数,由 q t取值确定;
68、步骤s64:状态不符值统计量以为基准反映的偏差程度:
69、 公式二十七;
70、步骤s65:以构造自适应因子 α2 t:
71、
72、式中, m和 n为常数,趋近于0;令, m取接近中后期最大值的经验值;
73、步骤s66:进一步修正式和得到:
74、
75、式中,由取值确定,且满足;
76、步骤s67:进行机车位置估计,并保存估计结果。
77、所述机车为以电力驱动且为直流牵引供电制式的城轨机车。
78、步骤s1中,选取传感器量测数据来判定区段定位结果。
79、本发明建立了计及电气测量信息的城轨机车位置估计模型。首先,根据机车区段定位结果确定相邻牵引所间在运行机车的数量,并构建不同机车数量下的牵引供电系统电路等效模型;其次,基于电路定理分析机车位置与牵引供电系统内各电气量测值之间的多等式关系,获取机车位置计算值并作为位置量测的补充;然后,考虑量测误差和建模误差的影响,结合机车运行过程,设计了基于抗差自适应卡尔曼滤波的城轨机车位置估计方法以实现机车位置的最优估计;本发明所述方法有利于在有限的量测条件下提高城轨机车定位的精度,进而保障城轨交通的安全、高效运行。
80、本发明所提的城轨机车位置估计方法中,结合电路特性约束利用电气量测值计算机车位置的方法能够有效解决机车位置实时量测不足的问题,抗差估计结果的可信度较高。同时,在量测不准确的情况下,本方法能够有效提高机车定位的精度,从百米级误差降低至十米级。
81、本发明方法实现的主要过程包括牵引供电系统内各电气测量信息与机车位置之间的相关性分析与计算式的建立方法,以及基于抗差自适应卡尔曼滤波的城轨机车位置估计模型的建立和求解方法,同时基于电路约束和机车运行过程开展了城轨机车位置估计的相关研究,提出了计及电气测量信息的城轨机车位置估计方法,有利于在有限的量测条件下提高城轨机车定位的精度,进而保障城轨交通的安全、高效运行。
82、本发明所提的城轨机车位置估计方法,通过系统电路拓扑和电路理论充分分析牵引供电系统的电气量测值中蕴含的机车位置信息,建立了各机车位置的多计算等式,获得机车位置计算结果并作为量测补充。建立了基于抗差自适应卡尔曼滤波的位置估计模型,能够有效排除量测值可能出现的不良数据,并能根据机车运行状态自适应调节滤波模型中最关键的预测和量测误差协方差的参数,从而实现机车位置的最优估计,提高了算法的适用性和鲁棒性,进一步提高城轨机车定位的精度。
本文地址:https://www.jishuxx.com/zhuanli/20241120/335181.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表