一种提高卫星喷气控制稳定性的电磁阀输出时序处理方法与流程
- 国知局
- 2024-11-21 12:31:21
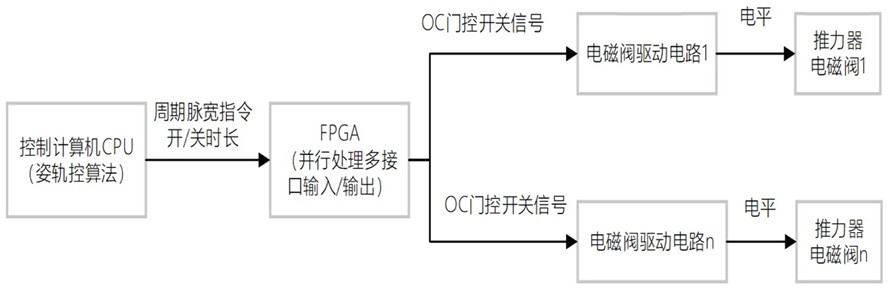
本发明属于航天器姿态轨道喷气控制,具体涉及一种提高卫星喷气控制稳定性的电磁阀输出时序处理方法,用于喷气控制脉宽调制输出的上位机cpu与接口控制逻辑芯片fpga的控制时序配合。
背景技术:
1、卫星的推进系统用于卫星的轨道机动、姿态机动、姿态维持甚至动量轮卸载使用。为了满足既能实现轨道机动和姿态调整,一般情况下一台卫星配置多套推进系统,安装在卫星的不同位置和方向上,采用脉宽调制方法进行姿态轨道的耦合控制,或者分时复用控制。
2、专利“一种采用斜装推力器进行卫星姿态和轨道控制的方法”提供了一种四斜装推力器布置,采用脉宽调制工作方式,并基于相平面控制方法,计算每个控制周期(周期一般设置1s或者2s)推力器同时进行调姿和轨控的喷气开关脉宽,实现了既能保持姿态指向也同时提高轨控效率的目的。
3、专利“一种基于时分复用方式的小卫星轨道控制方法”,提供了一种采用四斜装推力器按照控制周期依次开启电磁阀,推力的每一个脉宽调制输出包含轨控基准脉冲量to和姿控脉冲量ta,每个控制周期都更新脉宽输出量,姿控脉冲量是为了实现动量轮卸载,从而实现姿态轨道分时复用目的。
4、专利“新型低成本卫星三轴姿态分时解耦高复用喷气控制方法” 提供了一种四台推力器输出分时三轴分时解耦喷气控制算法,三轴指令控制力矩分时处理至四台推力器脉冲宽度的力矩分配脉宽调制算法,将指令力矩转化为具体的喷气脉冲,实现三轴的姿态解耦控制。
5、上述这些方法都涉及到推力器电磁阀脉宽调制输出,每个控制周期都需要更新电磁阀开关的脉宽时长。但是目前现有技术中都没有涉及到每个控制周期中脉宽调制输出的时序如何准确的周期过渡的问题。
技术实现思路
1、为了解决上述问题,本发明提供一种提高卫星喷气控制稳定性的电磁阀输出时序处理方法,使得各周期连续控制时降低推力器频繁开关次数,降低控制抖动,从而提高推力器控制的稳定性。
2、本发明是这样实现的,提供一种提高卫星喷气控制稳定性的电磁阀输出时序处理方法,包括如下步骤:
3、步骤1:在cpu中定义卫星喷气控制周期为t毫秒,且把cpu周期性输出给fpga的数字信号定义为两个参数[a,b],a表示电磁阀开时刻,b表示电磁阀开时长,a+b≤t;
4、步骤2:在fpga中,针对以下四种脉宽调制数字信号的控制类型,设置为按照以下方法进行处理:
5、控制类型v1:a、b皆为0时,fpga从接收到cpu数字信号的时刻起,到t毫秒一直输出控制电磁阀关;
6、控制类型v2:a为0,b为t1时,0<t1<t,fpga从接收到cpu数字信号的时刻起,到t1毫秒内输出控制电磁阀开,t1毫秒后到t毫秒一直输出控制电磁阀关;
7、控制类型v3:a为t2,b为t3时,t2+t3=t,fpga从接收到cpu数字信号的时刻起,到t2毫秒内输出控制电磁阀关,t2~ t一共t3毫秒内输出控制电磁阀开;
8、控制类型v4:a为0,b为t时,fpga从接收到cpu数字指令的时刻起,0~ t毫秒内一直输出控制电磁阀开;
9、步骤3:设置fpga每次从接收到cpu新的数字指令时刻起,按新的数字指令输出控制电磁阀动作,储存上一拍的数字指令;
10、步骤4:当fpga接收到cpu相邻两拍的数字指令在衔接时刻均为控制电磁阀开时,fpga在衔接时刻不进行控制电磁阀关的动作,始终保持输出控制电磁阀为开。
11、优选的,步骤4具体为:当上一拍cpu发来的数字指令为控制类型v3或控制类型v4,当前拍数字指令为控制类型v2或控制类型v4时,fpga在上一拍数字指令和当前拍数字指令的衔接时刻,始终保持输出控制电磁阀为开。
12、进一步优选,当cpu的喷气控制周期t和fpga计时器存在时钟误差tq毫秒,步骤4具体为:
13、当上一拍cpu发来的数字指令为控制类型v3或控制类型v4,当前拍数字指令为控制类型v2或控制类型v4时,则fpga输出控制电磁阀在上一拍数字指令完成后,持续控制电磁阀开tq毫秒,且在上一拍数字指令与时钟误差的衔接时刻、时钟误差与当前拍数字指令的衔接时刻,fpga不进行控制电磁阀关的动作,始终保持输出控制电磁阀为开。
14、与现有技术相比,本发明的优点在于:
15、1、控制类型v3/v4过渡到控制类型v2/v4时,fpga考虑了如果上一拍在触发时刻是开的,而当前拍开始也是开的,则在周期衔接处,fpga的上拉电平时钟寄存器持续累加,先保持上拉电平持续到当前拍开时长结束再下拉,从而实现周期衔接处不频繁开关切换,这样就确保姿态轨道控制不存在抖动,提高了控制指向精度;
16、2、解决了cpu的控制触发周期t和fpga计时器存在时钟误差tq的问题,在tq这段时间始终保持控制电磁阀开,从而覆盖了两个处理器配合存在的时间误差间隙,极大降低了控制的抖动。
技术特征:1.一种提高卫星喷气控制稳定性的电磁阀输出时序处理方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的提高卫星喷气控制稳定性的电磁阀输出时序处理方法,其特征在于,步骤4具体为:当上一拍cpu发来的数字指令为控制类型v3或控制类型v4,当前拍数字指令为控制类型v2或控制类型v4时,fpga在上一拍数字指令和当前拍数字指令的衔接时刻,始终保持输出控制电磁阀为开。
3.根据权利要求2所述的提高卫星喷气控制稳定性的电磁阀输出时序处理方法,其特征在于,当cpu的喷气控制周期t和fpga计时器存在时钟误差tq毫秒,步骤4具体为:
技术总结本发明属于航天器姿态轨道喷气控制技术领域,具体涉及一种提高卫星喷气控制稳定性的电磁阀输出时序处理方法。当FPGA接收到CPU相邻两拍的数字指令在衔接时刻均为控制电磁阀开时,FPGA在衔接时刻不进行控制电磁阀关的动作,始终保持输出控制电磁阀为开。本发明使得各周期连续控制时降低推力器频繁开关次数,降低控制抖动,从而提高推力器控制的稳定性。技术研发人员:容建刚,张龙,王梓良,康宝鹏,李辉受保护的技术使用者:北京国宇星辰科技有限公司技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/335486.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表