用于条播作物苗期间的激光除草机器人的除草方法和装置
- 国知局
- 2024-11-25 14:58:42
本发明涉及新农业,尤其涉及一种用于条播作物苗期间的激光除草机器人的除草方法和装置。
背景技术:
1、杂草对于作物生长有着多方面的影响,如资源竞争、寄生传播、品质污染和管理阻碍等问题,严重影响作物生产。因此,需要对杂草进行有效防治,以保障作物高产优质。
2、目前农业生产主流的除草方式是人工除草和化学除草,但人工除草效率低下需要消耗大量的人力资源,特别是面临劳动力欠缺的农村。化学除草的方式虽然效率较高,但会带来诸多隐形的问题,如环境污染、可能对人体健康产生影响、提升杂草的抗药性、恶化土壤质地影响农业的可持续性。
技术实现思路
1、为解决背景技术中存在的技术问题,本发明提出一种用于条播作物苗期间的激光除草机器人的除草方法和装置。
2、本发明提出的一种用于条播作物苗期间的激光除草机器人的除草方法,包括:
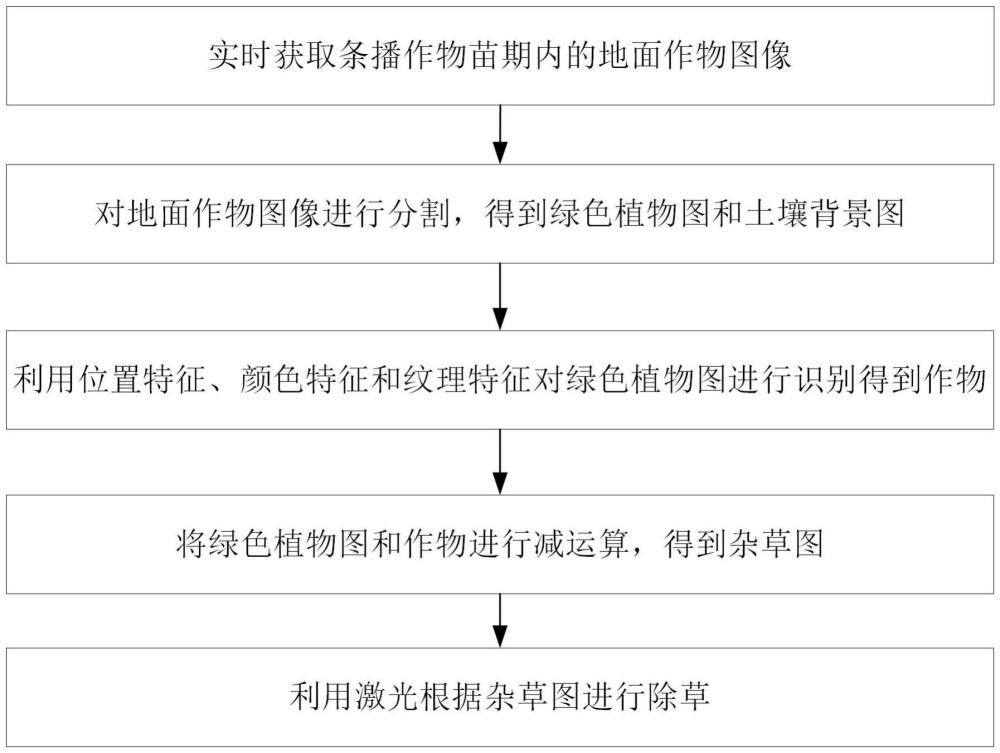
3、实时获取条播作物苗期内的地面作物图像;
4、对地面作物图像进行分割,得到绿色植物图和土壤背景图;
5、利用位置特征、颜色特征和纹理特征对绿色植物图进行识别得到作物;
6、将绿色植物图和作物进行减运算,得到杂草图;
7、利用激光根据杂草图进行除草。
8、优选地,利用位置特征、颜色特征和纹理特征对绿色植物图进行识别得到作物,具体包括:
9、根据绿色植物图的像素直方图,提取作物行的中心线和宽度,从而识别作物行;
10、根据颜色特征和纹理特征识别出作物行内的作物。
11、优选地,在获取条播作物苗期内的地面作物图像信息之前,还包括:
12、获取条播作物苗期内的地面作物的表面性状信息和环境信息;
13、根据地面作物的表面性状信息和环境信息,对地面作物进行打光。
14、优选地,根据获取的表面性状信息和环境信息,对地面作物进行打光,具体包括:
15、根据获取的表面性状信息和环境信息,确定光源的强度调整参数和角度调整参数;
16、根据光源的强度调整参数和角度调整参数,控制光源对待测目标产品进行打光。
17、优选地,利用激光根据杂草图进行除草,具体包括:
18、根据杂草图确定杂草的数量和位置;
19、利用激光除草机器人根据杂草的数量和位置对杂草及其根茎进行碳化。
20、优选地,在根据杂草图确定杂草的数量和位置之后,还包括:
21、判断位于作物旁的杂草的叶片是否和作物有重叠;
22、若是,则利用气流将杂草的叶片与作物分离。
23、本发明还提出了一种用于条播作物苗期间的激光除草机器人的除草装置,包括:
24、获取模块,用于实时获取条播作物苗期内的地面作物图像;
25、分割模块,用于对地面作物图像进行分割,得到绿色植物图和土壤背景图;
26、识别模块,用于利用位置特征、颜色特征和纹理特征对绿色植物图进行识别得到作物;
27、杂草确定模块,用于将绿色植物图和作物进行减运算,得到杂草图;
28、除草模块,用于利用激光根据杂草图进行除草。
29、优选地,利用位置特征、颜色特征和纹理特征对绿色植物图进行识别得到作物,具体包括:
30、根据绿色植物图的像素直方图,提取作物行的中心线和宽度,从而识别作物行;根据颜色特征和纹理特征识别出作物行内的作物。
31、优选地,还包括:
32、打光模块,用于获取条播作物苗期内的地面作物的表面性状信息和环境信息,并根据地面作物的表面性状信息和环境信息,对地面作物进行打光。
33、优选地,利用激光根据杂草图进行除草,具体包括:
34、根据杂草图确定杂草的数量和位置;
35、利用激光除草机器人根据杂草的数量和位置对杂草及其根茎进行碳化。
36、本发明中,所提出的用于条播作物苗期间的激光除草机器人的除草方法和装置,先利用位置特征、颜色特征和纹理特征对绿色植物图进行识别得到作物;再将绿色植物图和作物进行减运算得到杂草图,大大减轻了识别的难度和所需的算力,提高了识别速度,能够利用激光除草机器人根据杂草图进行快速除草,避免了化学除草带来的问题。
技术特征:1.一种用于条播作物苗期间的激光除草机器人的除草方法,其特征在于,包括:
2.根据权利要求1所述的用于条播作物苗期间的激光除草机器人的除草方法,其特征在于,利用位置特征、颜色特征和纹理特征对绿色植物图进行识别得到作物,具体包括:
3.根据权利要求1所述的用于条播作物苗期间的激光除草机器人的除草方法,其特征在于,在获取条播作物苗期内的地面作物图像信息之前,还包括:
4.根据权利要求3所述的用于条播作物苗期间的激光除草机器人的除草方法,其特征在于,根据获取的表面性状信息和环境信息,对地面作物进行打光,具体包括:
5.根据权利要求1所述的用于条播作物苗期间的激光除草机器人的除草方法,其特征在于,利用激光根据杂草图进行除草,具体包括:
6.根据权利要求5所述的用于条播作物苗期间的激光除草机器人的除草方法,其特征在于,在根据杂草图确定杂草的数量和位置之后,还包括:
7.一种用于条播作物苗期间的激光除草机器人的除草装置,其特征在于,包括:
8.根据权利要求7所述的用于条播作物苗期间的激光除草机器人的除草装置,其特征在于,利用位置特征、颜色特征和纹理特征对绿色植物图进行识别得到作物,具体包括:
9.根据权利要求1所述的用于条播作物苗期间的激光除草机器人的除草装置,其特征在于,还包括:
10.根据权利要求7所述的用于条播作物苗期间的激光除草机器人的除草装置,其特征在于,利用激光根据杂草图进行除草,具体包括:
技术总结本发明公开了一种用于条播作物苗期间的激光除草机器人的除草方法和装置,包括:实时获取条播作物苗期内的地面作物图像;对地面作物图像进行分割,得到绿色植物图和土壤背景图;利用位置特征、颜色特征和纹理特征对绿色植物图进行识别得到作物;将绿色植物图和作物进行减运算,得到杂草图;利用激光根据杂草图进行除草。本发明大大减轻了识别的难度和所需的算力,提高了识别速度,能够利用激光除草机器人根据杂草图进行快速除草,避免了化学除草带来的问题。技术研发人员:奥迪,周星星,吴秉校,罗毅智,齐海军,赵俊宏受保护的技术使用者:广东省农业科学院设施农业研究所技术研发日:技术公布日:2024/11/21本文地址:https://www.jishuxx.com/zhuanli/20241125/335564.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表