一种飞轮储能系统控制方法
- 国知局
- 2024-11-25 15:04:37
本申请涉及飞轮储能,特别是涉及一种飞轮储能系统控制方法。
背景技术:
1、近年来,光伏、风电为主力的新型能源得到了大力发展,但风力发电和光伏发电受自然条件所制约,导致其具有随机性、波动性等固有属性,若将其直接并网必然会对电力系统的电网调峰以及安全运行带来巨大的挑战。
2、因此,作为新能源发展核心支撑的储能技术受到越来越广泛的关注。储能技术在电网中的应用将大幅提高电网运行的可靠性、安全性、经济性和灵活性,同时也是实现能量高效利用的重要途径。其中,飞轮储能具有储能密度较高、充放电次数与充放电深度无关、能量转换效率高、可靠性高易维护、使用环境要求低、无污染等特点,比化学电池储能等技术更具优越性。使得飞轮储能系统在电网调频、电网安全稳定控制、电能质量治理、车辆再生制动、小型孤岛电网调峰,高功率脉冲电源、风力发电系统不间断供电等领域有着广泛的应用前景,成为当前研究的热点。
3、飞轮储能系统中,双向可逆电机是飞轮储能系统的核心部件,是实现能量交换的关键。电机与电力电子装置配合完成能量吸收与释放,因此电机的性能对储能系统的效率等方面具有很大的影响。永磁同步电机与传统电机相比提高了电机的功率密度及效率,适合在真空环境下运行,且转子结构简单,适宜高速旋转和具有较宽的转速范围。因此选择表贴式永磁同步电机为飞轮储能系统中的双向可逆电机。但表贴式永磁同步电机是一个多变量、强耦合、非线性的系统,考虑飞轮储能系统发电时发电机内部参数的变化和外部扰动等不确定性因素的影响,要想使输出功率满足电网指令要求与供电品质,就要采用兼具快速性、稳定性、对外部扰动与内部参数变化不敏感的控制策略。在高性能的永磁同步电机矢量控制系统中通常需要编码器或者旋转变压器等机械式传感器提供实时的转子位置信息,但是机械式传感器既增加了系统的成本,同时还存在易受干扰、可靠性差、安装维护困难等问题。因此永磁同步电机无位置传感器控制技术成为国内外学者的研究热点,无位置传感器控制技术可以通过电磁信息来估计转子的位置信息,不易受到环境的影响,提高了系统的环境适应性。根据位置估计原理的不同,永磁同步电机的无位置传感器控制技术分为两类:第一类为基于电机电感凸极效应的高频信号注入策略;另一类为基于反电动势的基波模型估计法,广泛适用于中高速电机领域。其中,滑模观测器技术是一种基于变结构理论的非线性方法,在一定程度上减少了对系统模型的依赖,具有设计简单、鲁棒性强、对自身参数变化不敏感等特点,成为中高速电机无位置传感器控制方法中极具潜力的方案,得到研究者们的青睐。但由于现有滑模观测器的反电动势基波中存在高频谐波含量高、抖振严重以及转子位置估计误差大等问题,因此,有必要设计一种新的飞轮储能系统控制策略,以增强滑模观测的稳定性的效果,提高滑模观测的估计精度。
技术实现思路
1、本申请的目的是提供一种飞轮储能系统控制方法,可增强滑模观测的稳定性的效果,提高滑模观测的估计精度,实现飞轮储能系统与电网之间功率交换的准确控制。
2、为实现上述目的,本申请提供了如下方案:
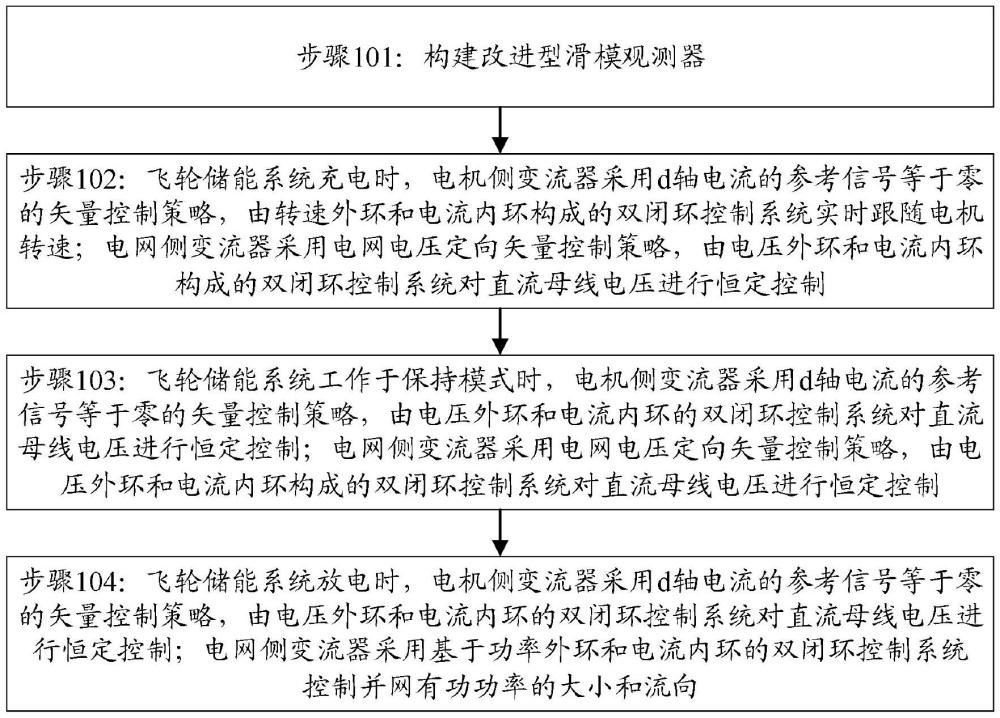
3、本申请提供了一种飞轮储能系统控制方法,包括:构建改进型滑模观测器;所述改进型滑模观测器采用连续的sigmoid函数,滑模面函数引入积分与幂次趋近律,并引入反电动势自适应律;飞轮储能系统充电时,电机侧变流器采用d轴电流的参考信号等于零的矢量控制策略,由转速外环和电流内环构成的双闭环控制系统实时跟随电机转速;电网侧变流器采用电网电压定向矢量控制策略,由电压外环和电流内环构成的双闭环控制系统对直流母线电压进行恒定控制;其中,所述转速外环以改进型滑模观测器观测的飞轮储能系统中的电机转速为输入;所述电机侧变流器的电流内环以改进型滑模观测器观测的转子位置角度为一个输入;飞轮储能系统工作于保持模式时,电机侧变流器采用d轴电流的参考信号等于零的矢量控制策略,由电压外环和电流内环的双闭环控制系统对直流母线电压进行恒定控制;电网侧变流器采用电网电压定向矢量控制策略,由电压外环和电流内环构成的双闭环控制系统对直流母线电压进行恒定控制;飞轮储能系统放电时,电机侧变流器采用d轴电流的参考信号等于零的矢量控制策略,由电压外环和电流内环的双闭环控制系统对直流母线电压进行恒定控制;电网侧变流器采用基于功率外环和电流内环的双闭环控制系统控制并网有功功率的大小和流向。
4、根据本申请提供的具体实施例,本申请公开了以下技术效果:
5、本申请提供了一种飞轮储能系统控制方法,在采用的电机无位置矢量控制技术中,设计了改进型滑模观测器,该改进型滑模观测器采用连续的sigmoid函数替代不连续的sgn开关函数,加快了收敛速度和削弱了系统抖振;滑模面函数引入积分设计与幂次趋近律相结合,用于平滑转矩,减小系统稳态误差,削弱抖振,且控制律不会出现变量的二阶导数,增强了滑模观测器的稳定性效果;将反电动势自适应律引入到改进型滑模观测器中,滤除了扩展反电动势估计值中的高频谐波信号,并且为了消除转子转速的影响,在传统锁相环中加入消除旋转影响的环节,进而提高了滑模观测的估计精度。通过在飞轮储能系统充电、保持和放电时,电机侧变流器和电网侧变流器分别采用不同的控制策略,实现飞轮储能系统与电网之间功率交换的准确控制。
技术特征:1.一种飞轮储能系统控制方法,其特征在于,包括:
2.根据权利要求1所述的飞轮储能系统控制方法,其特征在于,构建改进型滑模观测器,具体包括:
3.根据权利要求2所述的飞轮储能系统控制方法,其特征在于,所述锁相环输出电机转速和转子位置角度的过程为:
4.根据权利要求1所述的飞轮储能系统控制方法,其特征在于,飞轮储能系统充电时,电机侧变流器采用d轴电流的参考信号等于零的矢量控制策略,由转速外环和电流内环构成的双闭环控制系统实时跟随电机转速,具体包括:
5.根据权利要求1所述的飞轮储能系统控制方法,其特征在于,电网侧变流器采用电网电压定向矢量控制策略,由电压外环和电流内环构成的双闭环控制系统对直流母线电压进行恒定控制,具体包括:
6.根据权利要求1所述的飞轮储能系统控制方法,其特征在于,电机侧变流器采用d轴电流的参考信号等于零的矢量控制策略,由电压外环和电流内环的双闭环控制系统对直流母线电压进行恒定控制,具体包括:
7.根据权利要求1所述的飞轮储能系统控制方法,其特征在于,飞轮储能系统放电时,电网侧变流器采用基于功率外环和电流内环的双闭环控制系统控制并网有功功率的大小和流向,具体包括:
8.根据权利要求4或6所述的飞轮储能系统控制方法,其特征在于,电机侧变流器的q轴电压的参考信号uq和d轴电压的参考信号ud的计算公式为:
9.根据权利要求5或7所述的飞轮储能系统控制方法,其特征在于,电网侧变流器的两相静止坐标系下的α轴电压的参考信号u'α和β轴电压的参考信号u'β的计算公式为:
10.根据权利要求1所述的飞轮储能系统控制方法,其特征在于,电网侧变流器采用电网电压定向矢量控制策略,由电压外环和电流内环构成的双闭环控制系统对直流母线电压进行恒定控制,之后还包括:
技术总结本申请公开了一种飞轮储能系统控制方法,涉及飞轮储能技术领域,该方法构建的改进型滑模观测器采用连续的sigmoid函数,滑模面函数引入积分与幂次趋近律,并引入反电动势自适应律;系统充电时,电机侧由转速外环和电流内环构成双闭环控制系统控制;电网侧由电压外环和电流内环构成双闭环控制系统控制;系统保持时,电机侧变流器由电压外环和电流内环构成双闭环控制系统控制;电网侧采用与充电时相同的控制策略;系统放电时电机侧采用与保持时相同的控制策略;电网侧采用基于功率外环和电流内环构成的双闭环控制系统控制。本申请能增强滑模观测的稳定性的效果,提高滑模观测的估计精度,实现飞轮储能系统与电网之间功率交换的准确控制。技术研发人员:肖士勇,韩志豪,蔡国伟,刘智慧受保护的技术使用者:东北电力大学技术研发日:技术公布日:2024/11/21本文地址:https://www.jishuxx.com/zhuanli/20241125/335992.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表