一种补偿控制方法、装置、设备及产品与流程
- 国知局
- 2024-11-25 15:04:54
本发明涉及电机控制,特别是指一种补偿控制方法、装置、设备及产品。
背景技术:
1、电动汽车通过电机驱动车轮实现车辆行驶,电机作为电动汽车的动力核心对整车性能影响重大,随着永磁材料、电力电子技术、控制理论、电机制造以及信号处理硬件的发展,永磁同步电机(permanent magnet synchronous motor,pmsm)得到了普遍应用,永磁同步电动机由于具有高效率、高输出转矩、高功率密度以及良好的动态性能等优点,成为纯电动汽车驱动系统的主流。矢量控制是行业内关于永磁同步电机控制的主流解决方案,其依托于电压源型逆变器igbt功率模块具体实施,通过控制igbt(insulate gate bipolartransistor,绝缘栅双极晶体管)功率模块u、v、w三相桥臂(包括上桥臂与下桥臂)的导通与断开实现矢量控制中的空间矢量脉宽调制技术(space vector pulse width modulation,svpwm),从而使电机输出预期扭矩。在实际的控制过程中,为防止igbt功率模块上、下桥臂的直通需要在桥臂开关切换时加入长度大于开关切换时间的延时,该延时被称为死区时间。死区时间会导致igbt功率模块输出电压与实际值之间存在误差,从而引起电机三相电流发生畸变、增大电流中的谐波含量、降低系统效率,严重情况下会导致电机输出扭矩的脉动。另外,igbt功率模块的开关频率越高死区效应导致的问题越突出。
技术实现思路
1、本发明的目的是提供一种补偿控制方法、装置、设备及产品,用于解决现有技术中死区时间会导致电机中igbt功率模块输出电压与实际值之间存在误差,从而引起电机三相电流发生畸变、增大电流中的谐波含量、降低系统效率,严重情况下会导致电机输出扭矩的脉动的问题。
2、为达到上述目的,本发明的实施例提供一种补偿控制方法,其中,包括:
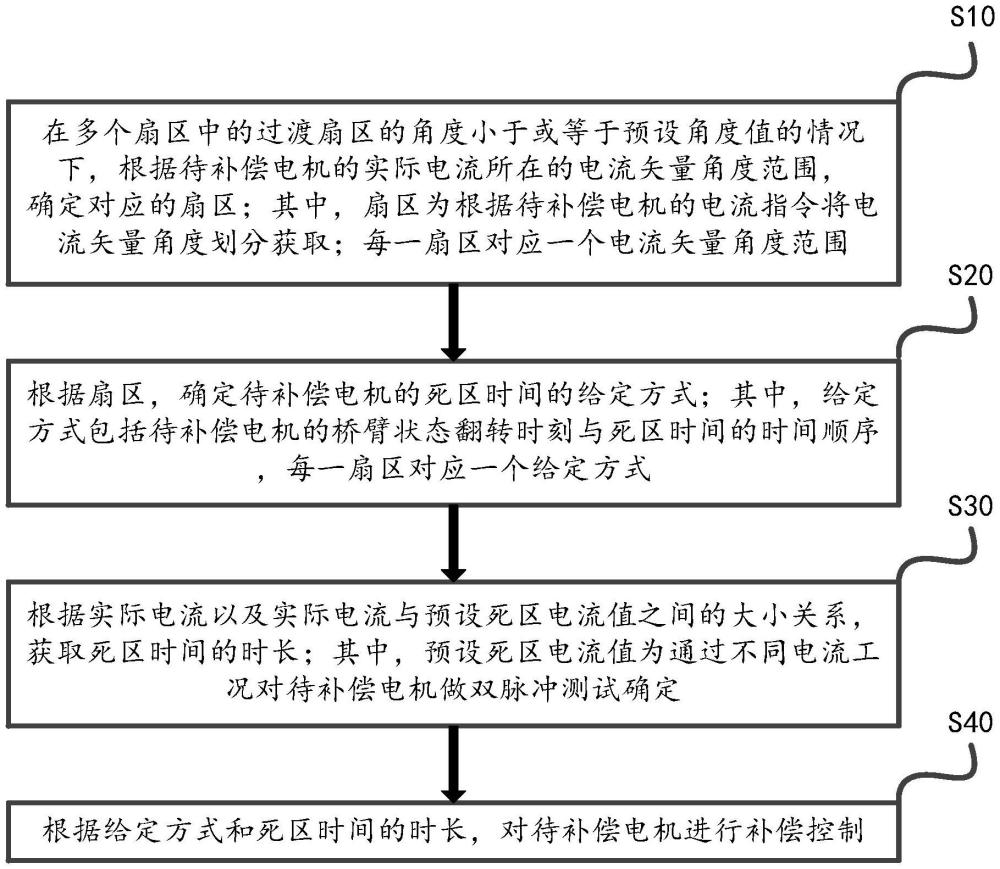
3、在多个扇区中的过渡扇区的角度小于或等于预设角度值的情况下,根据待补偿电机的实际电流所在的电流矢量角度范围,确定对应的扇区;其中,所述扇区为根据所述待补偿电机的电流指令将电流矢量角度划分获取;每一所述扇区对应一个电流矢量角度范围;
4、根据所述扇区,确定所述待补偿电机的死区时间的给定方式;其中,所述给定方式包括所述待补偿电机的桥臂状态翻转时刻与死区时间的时间顺序,每一所述扇区对应一个所述给定方式;
5、根据所述实际电流以及所述实际电流与预设死区电流值之间的大小关系,获取死区时间的时长;其中,所述预设死区电流值为通过不同电流工况对所述待补偿电机做双脉冲测试确定;
6、根据所述给定方式和所述死区时间的时长,对所述待补偿电机进行补偿控制。
7、可选地,所述的方法,其中,在所述根据待补偿电机的实际电流所在的电流矢量角度范围,确定对应的扇区之前,所述方法还包括:
8、根据所述待补偿电机的电流指令将电流矢量角度划分为多个所述扇区;其中,所述扇区包括普通扇区和所述过渡扇区;所述过渡扇区的角度根据所述实际电流和所述电流指令获取;
9、确定所述过渡扇区对应的所述给定方式为第一给定方式,所述普通扇区对应的所述给定方式为第二给定方式;其中,所述第一给定方式为死区时间沿所述桥臂状态翻转时刻为中心均匀分布的方式;所述第二给定方式为死区时间依据第一桥臂进行设置,断开所述第一桥臂时死区时间位于所述桥臂状态翻转时刻前,或者,导通所述第一桥臂时死区时间位于所述桥臂状态翻转时刻后的方式;所述第一桥臂为非电流经过的桥臂。
10、可选地,所述的方法还包括:
11、过渡扇区的角度预设角度在所述过渡扇区的角度大于所述预设角度值的情况下,确定多个所述扇区的所述给定方式为所述第一给定方式。
12、过渡扇区的角度预设角度可选地,所述的方法,其中,所述根据所述待补偿电机的电流指令将电流矢量角度划分为多个所述扇区,包括:
13、获取所述电流指令;
14、根据所述电流指令获取所述过渡扇区的角度;
15、根据所述过渡扇区的角度将所述电流矢量角度划分为多个所述扇区;其中,所述电流矢量角度为周角。
16、可选地,所述的方法,其中,所述根据所述扇区,确定所述待补偿电机的死区时间的给定方式,包括:
17、过渡扇区的角度预设角度在所述实际电流所在的扇区为所述过渡扇区的情况下,确定所述给定方式为所述第一给定方式;
18、在所述实际电流所在的所述扇区为所述普通扇区的情况下,确定所述给定方式为所述第二给定方式。
19、可选地,所述的方法,其中,在所述确定所述给定方式为所述第二给定方式之后,所述方法还包括:
20、根据所述扇区在电流方向判断表中获取所述实际电流的电流方向;其中,所述电流方向判断表为多个所述普通扇区对应的电流的方向的集合;
21、根据所述电流方向,确定所述第一桥臂。
22、可选地,所述的方法,其中,所述根据所述实际电流以及所述实际电流与预设死区电流值之间的大小关系,获取死区时间的时长,包括:
23、根据所述实际电流与所述预设死区电流值的大小关系,确定所述待补偿电机的桥臂关断时长;
24、根据所述桥臂关断时长、桥臂最小导通时长和所述实际电流,获取所述死区时间的时长。
25、可选地,所述的方法,其中,所述根据所述实际电流与所述预设死区电流值的大小关系,确定所述待补偿电机的桥臂关断时长,包括:
26、在所述实际电流的绝对值大于所述预设死区电流值的情况下,确定所述桥臂关断时长为第一标准值;
27、在所述实际电流的绝对值小于或等于所述预设死区电流值的情况下,确定所述桥臂关断时长为第二标准值;
28、其中,所述第一标准值小于所述第二标准值。
29、为了达到上述目的,本发明实施例还提供一种补偿控制装置,其中,包括:
30、第一确定模块,用于在多个扇区中的过渡扇区的角度小于或等于预设角度值的情况下,根据待补偿电机的实际电流所在的电流矢量角度范围,确定对应的扇区;其中,所述扇区为根据所述待补偿电机的电流指令将电流矢量角度划分获取;每一所述扇区对应一个电流矢量角度范围;
31、第二确定模块,用于根据所述扇区,确定所述待补偿电机的死区时间的给定方式;其中,所述给定方式包括所述待补偿电机的桥臂状态翻转时刻与死区时间的时间顺序,每一所述扇区对应一个所述给定方式;
32、第一获取模块,用于根据所述实际电流以及所述实际电流与预设死区电流值之间的大小关系,获取死区时间的时长;其中,所述预设死区电流值为通过不同电流工况对所述待补偿电机做双脉冲测试确定;
33、第一处理模块,用于根据所述给定方式和所述死区时间的时长,对所述待补偿电机进行补偿控制。
34、为了达到上述目的,本发明实施例还提供一种电子设备,包括:处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序或指令;其中,所述处理器执行所述程序或指令时实现如上所述的补偿控制方法。
35、为了达到上述目的,本发明实施例还提供一种可读存储介质,其上存储有程序或指令,其中,所述程序或指令被处理器执行时实现如上所述的补偿控制方法中的步骤。
36、为了达到上述目的,本发明实施例还提供一种计算机程序产品,其中,包括计算机指令,所述计算机指令被处理器执行时实现如上所述的补偿控制方法的步骤。
37、本发明的上述技术方案的有益效果如下:
38、本发明实施例通过待补偿电机的实际电流所在的电流矢量角度范围对应的扇区,确定死区时间的给定方式,并且根据实际电流与预设死区电流值之间的大小关系获取死区时间的时长,从而达到对待补偿电机的补偿控制,实现既减少死区时间的时长,减小电流中的谐波含量,又能够对死区时间进行调节,提高大电流工况下电机实际输出电流的有效值,达到提升系统性能的目的。
本文地址:https://www.jishuxx.com/zhuanli/20241125/336031.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表